1
Изобретение относится к машинам непрерывного транспорта, а именно к подвесным конвейерам, в частности к передающим устройствам.
Известно передающее устрюйство тепежек подвесного конвейера, выполненное в виде поворотного колеса с гнездами для упоров тепежек 0-
Недостаток такого устройства - сложная система синхронизации.
Наиболее близким техническим решением к описываемому изобретению является передающее устройство подвесного конвейера, включающее в себя расположенные., в зоне направляющего пути радиально смонтированные на поворотном валу манипуляторы, установленные с возможностью взаимодействия с выдвижным копиром, и захваты тележек конвейера 2 .JQ
Однако известное устройство ненадежно в работе.
Цель изобретения - повышение надежности работы устройства.
Цель достигается тем, что копир выполнен в виде изогнутой кониентрично направляющему пути поворотной пластины, один конец которой шарнирно закреплен на оси, а другой оснащен защелкой с упором для фиксации копира.
Кроме того, каждый захват ма1гипулятора выполнен в виде двух поворотных рычагов, связанных посредством штанг с пальцем, установленнным с возможностью перет/ещения в пазу манипулятора при взаимодействии с копиром, при этс один рычаг снабжен жестким упором для захвата тележки, а другой - упором для удержания тележки и выполнен поворотным и со скосом в сторону передачи тележки.
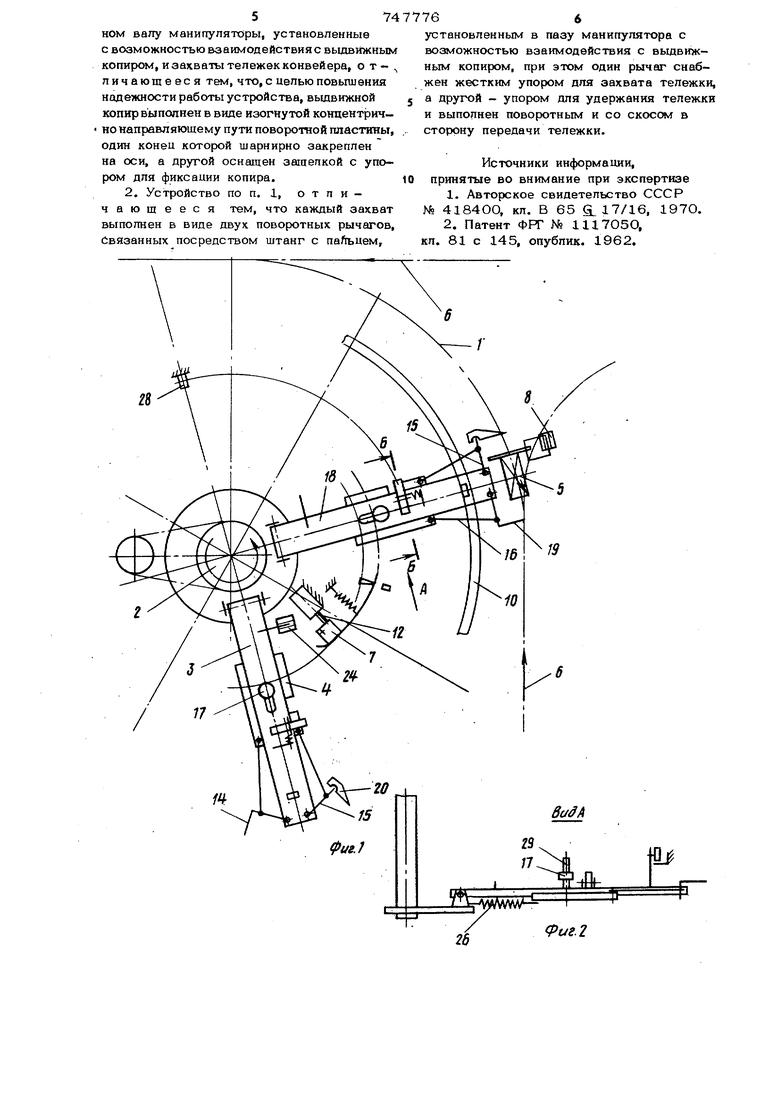
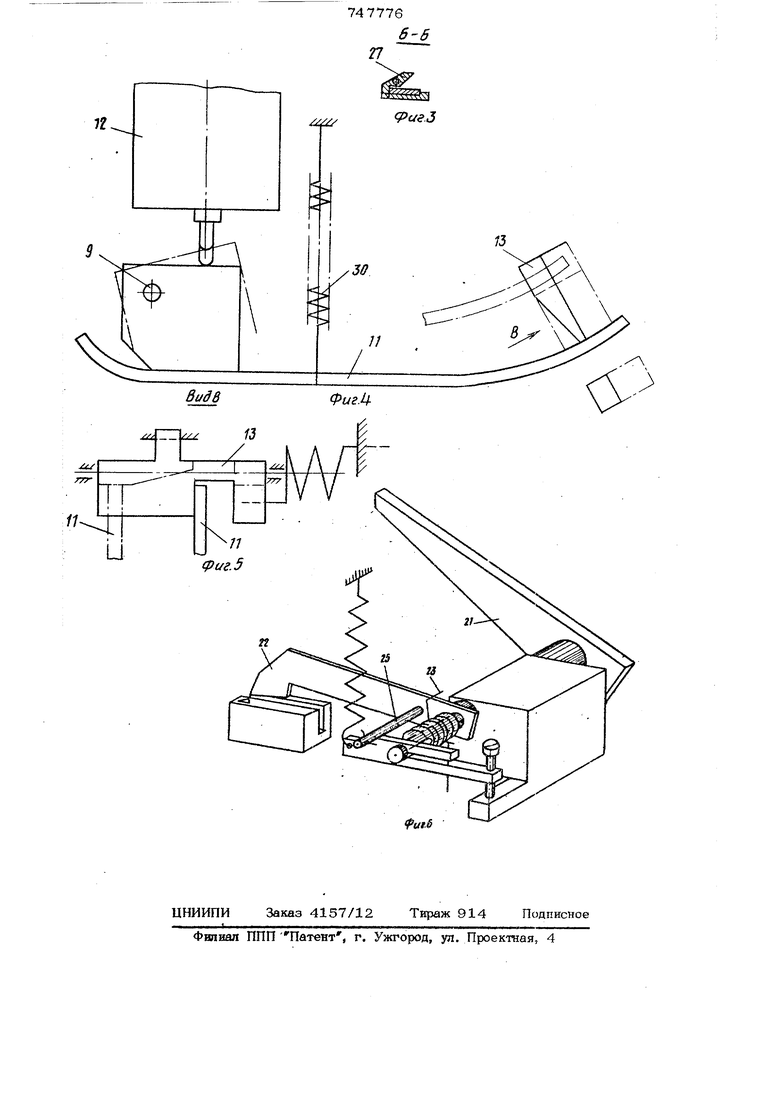
На фиг. 1 показано предлагаемое ус- ройство| на фиг. 2 - то же, вид по стрелке А на фиг. 1; на фиг. 3 - разрез Б-Б на фиг. 1; на фиг. 4 - копир; на фиг. 5 то же, вид по стрелке В на фиг. 4j на фиг. 6 - датчик наличия тележки.
Передающее устройство установлено в зоне направляющего пути 1 и содержит
374
радиально смонтированные на поворотном валу 2 манипуляторы 3, каждый из которых снабжен захватом 4, взаимодействующим с тепежкой 5 подвесного топкаюшего конвейера 6. Устройство имеет копир 7, устанавливаемый в рабочее положение по сигнапгу датчика 8 наличия тепежки и копира. Копир выполнен в виде поворотно закрепленной на оси 9 изсяшутой концентрично направляющему пути 10 пластины 11, выдвигae fOй посредством привода 12 от сигналов датчиков. Пластина копира фиксируется защелкой 13с клиновыми скосом и упором.
Захват каждого манипулятора выполнен в виде двух поворотно закрепленных рычагов 14 и 15, шарнирно связанных посредствсж штанг 16 с пальцем 17, установленным с возможностью перемещения в пазу корпуса 18 манипулятора. Один рычаг снабжен жестким упором 19 дпя захвата тележки, а другой рычаг оС)Орудован поворотным и скошенным в сторону передачи тележки упором 20, удерживающим тележку в захвате.
: Датчик 8 наличия тележки имеет подпружиненный рычаг 21, связанный с флажком 22 посредством пружины 23. Устройство снабжено датчиком 24 копира. Флажок 22 установ71ен на пальце 25 с возможностью поворота. 1- 1чаги 14 и 15 соединены с пружиной 26, а фиксация-их осуществляется защелкой 27. На трассе устройства неподвижно крепится упор 28. Штырь 29 неподвижно закреплен на манипуляторе. Пластина 11 копира связана с пружиной 30 для возврата ее в исходное положение.
Передающее устройство работает следующим образом.
Когда какую-либо из тележек 5, транспортируемых подвесным толкающим конвейером 6, требуется по технологии передать на другие пути этого конвейера или на другой конвейер, тележка 5 заводится на направляющие пути 1. При остановке тележки в районе датчика 8 она воздействует на его подпружиненный рычаг 21, который через палец 25 и пружину 23 поворачивает флажок 22, вызывающий срабатывание соответствующего реле в схеме управления. При прохождении флажком манипулятора датчика 24 копира подается сигнал на привод копира 7. Для компенсации угпа отклонения рычага 21 предусмотрена пружина 23.
При отсутствии тепежки на путях 1 передающего устройства манипуляторы 3
7764
поворачиваются вхолостую, проходя свободно мнмо копира 7 и не взаимодействуя с ним. При поступлении сигнала о наличии тележки 5 на направляюгцих путях 1 включается привод 12 копира 7 и его пластина 11 начинает поворачиваться в сторону по ходу передачи тележек вокруг оси 9. Одновременно с этим пластина взат,-тодействует с поверхностью защелки
0 13. Так как эта поверхность выполнена с клтювым скосом, то при взаимодействии с ней пластины 11 защелка 13 поворачивается и подводит упор, расположенный в нижней части скоса, под пластину 11, в
5 результате чего происходит постепенное, без ударов и надежное фиксирование пластины в подвижном положении. Поворачиваясь на валу, манипулятор своим пальцем 17 контактирует с пластиной 11 ко0 пира.
Палец 17, перемещаясь в пазу корпуса 18, тянет за собой штанги 16, которые в свою очередь поворачивают рычаги 14 и 15 захвата 4 манипулятора. При взаимодействии пальиа 17с пластиной 11 копира и перемещении его в пазу растягивается пружина 26, а когда рычаги 14 и 15 принимают исходное для захвата тележки 5 положение, происходит фиксирование их в этом положеник защелкой 27.
Упор 20, скошенный в сторону передачи тележки 5, поворачивается и пропускает ее в захват. Доходя до упора 19 рычага 14, тележка упирается в него и ведется
манипулятором по путям 1 передающего устройства до стрелки, открывающей путь на другие пути конвейера 6. Передав тележку 5 на другие пути, манипулятор продолжает дви«сение и входит в контакт с
упором 28, неподвижно закрепленным на трассе устройства. При взаимодействии с упором 28 происходит сброс защелки 27 и посредством пружины 26 осуществляется возврат рычагов 14 и 15 в исходное попожение. Возврат пластины 11 копира производится посредством поворота защелки 13 под воздействием штыря 29 в положение, обеспечивающее прохождение пластины 11 в исходное положение при
помощи пружины 30.
Формула изобретения
1. Передающее устройство подвесного толкающего конвейера, включающее в установленные в зоне направляющего пути радиально смонтированные на поворот
574
ном ватту манипуляторы, установленные с возможностью взаимодействия с выдвижным копиром, и захваты тележек конвейера, о тпинающееся тем, что,с цельюповьпиения надежности работы устройства, вьщвижной копир выполнен в виде изогнутой концентрич но направляющему пути поворотной пластины, один коней которой шарнирно закреплен на оси, а другой оснащен защелкой с упором для фиксации копира,
2. Устройство по п. 1, отличающееся тем, что каждый захват выполнен в виде двух поворотных рычагов. Связанных посредством штанг с паЛьцем,
77766
установленным в пазу манипутштора с возможностью взаимодействия с вьщвижным копиром, при этом один рычаг снабжен жестким упором для захвата тележки,
5 а другой - упором для удержания тележки и выполнен поворотным и со скосом в
. сторону передачи тележки.
Источники информации,
10 принятые во внимание при экспертизе 1, Авторское свидетельство СССР № 4184ОО, кл, В 65 S 17/16, 197О,
2. Патент ФРГ № 1117О5О, кл, 81 с 145, опубпик, 1962.
12
/.i
PueJ

| название | год | авторы | номер документа |
|---|---|---|---|
| Тележечный конвейер | 1980 |
|
SU918198A1 |
| УСТРОЙСТВО для НАВЕШИВАНИЯ И СЪЕЛи ПРИКРЕПЛЕННБ1Х К ТРАВЕРСЕ ГРУЗОВ С КРЮКОВ ГРУЗОВЫХ ТЕЛЕЖЕК НОДВЕСНОГО ТОЛКАЮЩЕГОКОНВЕЙЕРА | 1965 |
|
SU173137A1 |
| Устройство для перегрузки изделий | 1982 |
|
SU1065316A1 |
| Поргузочно-разгрузочное устройстводля пОдВЕСНОгО КОНВЕйЕРА | 1979 |
|
SU814828A1 |
| Останов подвесного толкающего конвейера | 1984 |
|
SU1276591A1 |
| Тележка для щелевого конвейера | 1972 |
|
SU605763A1 |
| Подвесной конвейер | 1979 |
|
SU816881A1 |
| Толкатель подвесного грузоведущего конвейера | 1978 |
|
SU854824A1 |
| Установка для расфасовки сыпучих продуктов в барабаны | 1986 |
|
SU1414709A1 |
| Устройство для передачи грузов | 1989 |
|
SU1641744A1 |
tn
Buds
Фиг.
