1
Изобретение относится к транспортировке грузов, в частности, к механизации межоперационного транспорта и может быть использовано в техноло-, гических швейных потоках с. многорядным расположением рабочих мест, перегрузки тележек с полуфабрикатом швейных изделий из одного ряда в другой .
Известен подвесной койвейер с устройством для перегрузки подвесок с одного конвейера на другой,. которое включает поворотную посредством криволинейного механизма рычажную систему с захватами, размещенную на раме между ходовыми путями Ц.
Недостаток указанного конвейера состоит в том, что он не обеспечирает при перегрузке с одного ходового пути на другой поворот подвески с изделием на 180°.
Наиболее близким техническим решением к предлагаемому является подвесной конвейер, содержащий закрепленные на кронштейнах основные направляющие, установленные на основных направляющих тележки, и поворотный механизм передачи тележек с одной основной направляющей на другую с фиксатором его положения. В этом конвейере для
разворота подвески с изделием на 180 используется поворотный рельс, который выполнен с сегментной выемкой под ролики троллеев. На валу поворотного
рельса установлено храповое колесо для фиксации поворотного рельса при заталкивании на него троллея 2.
Известный поворотный рельс с сегментной выемкой под ролики троллеев
не обеспечивает надежной фиксации троллеев во время разворота рельса. Сегментная выемка увеличивает сопротивление перемещению троллеев.Ударные нагрузки, возникакяцие из-за криволинейности рельса (за счет выемки),
способствуют более интенсивному иэног су рабочей поверхности, при этом во время съезда троллеев в сегментную выемку и выезда наблюдается перекос
троллеев.
Цель изобретения - повышение надежности передачи тележек при параллёльном расположении основных направляющих.
Указанная цель достигается тем, что поворотный механизм передачи тележек выполнен из двух дополнительных параллельных направлякяцих, каждая из которых снабжена подпружиненным упо.ром и толкателем с роликом, при этом
каждая основная направляющая снабжена пластиной, установленной с возможностью взаимодействия с роликом толкателя при стыковке дополнительной и основной направляющих.
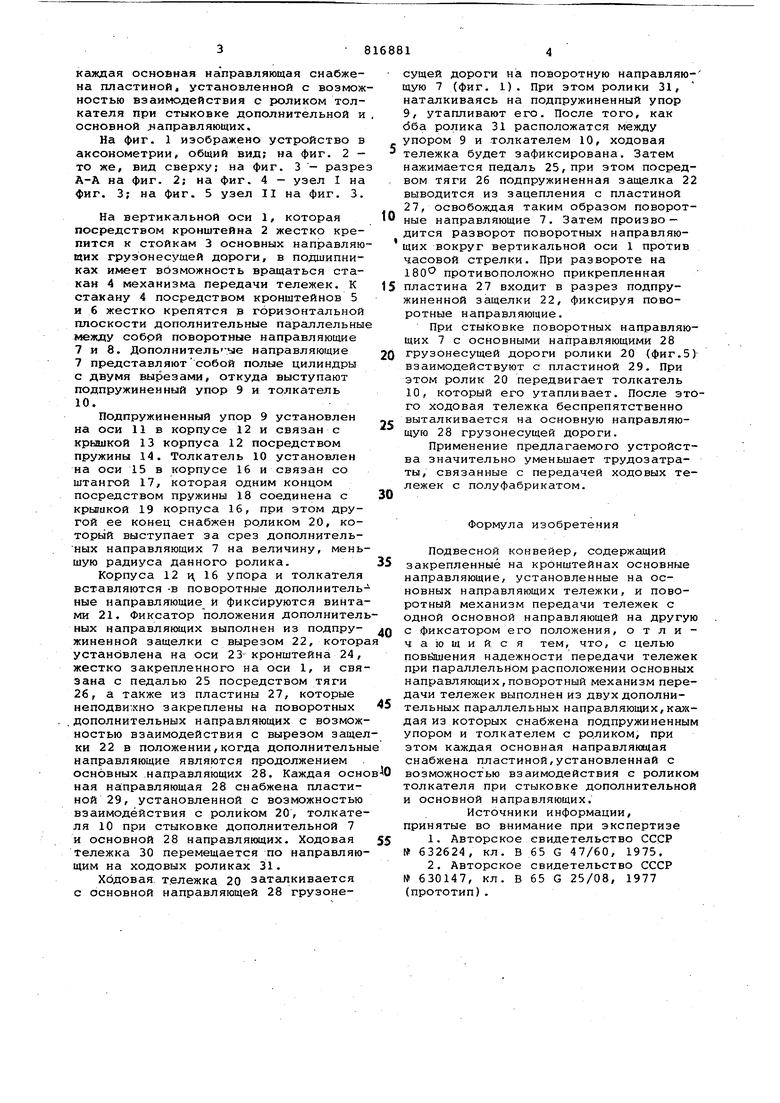
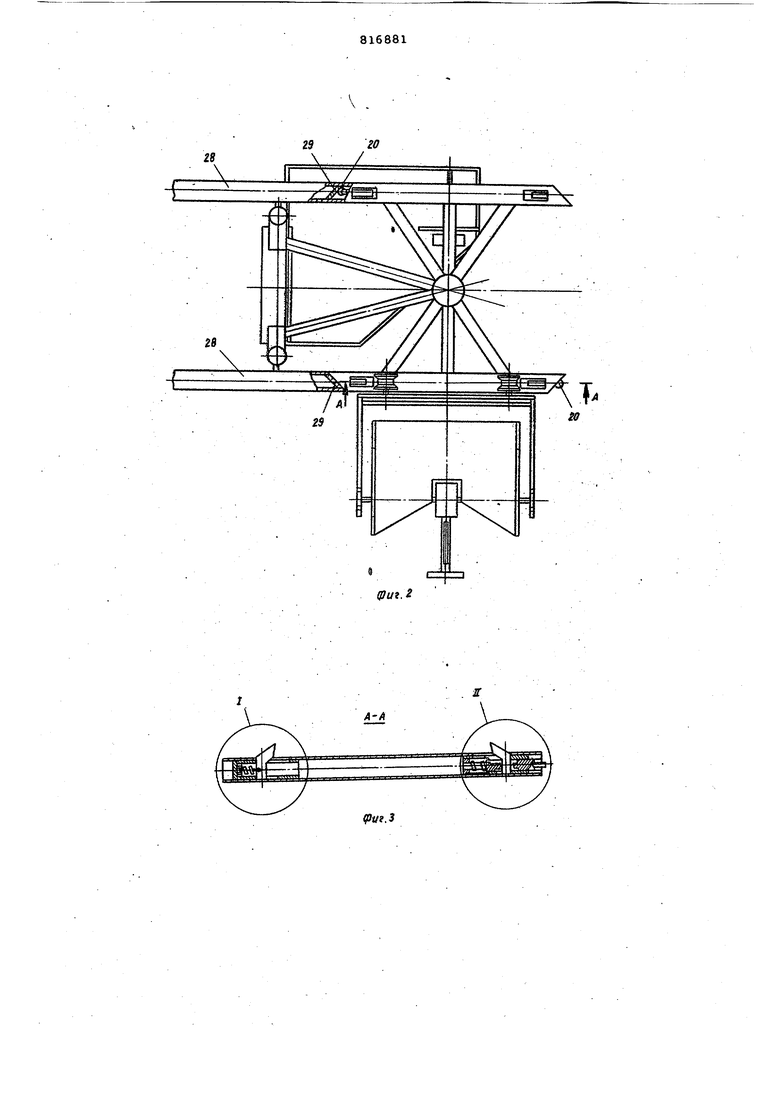
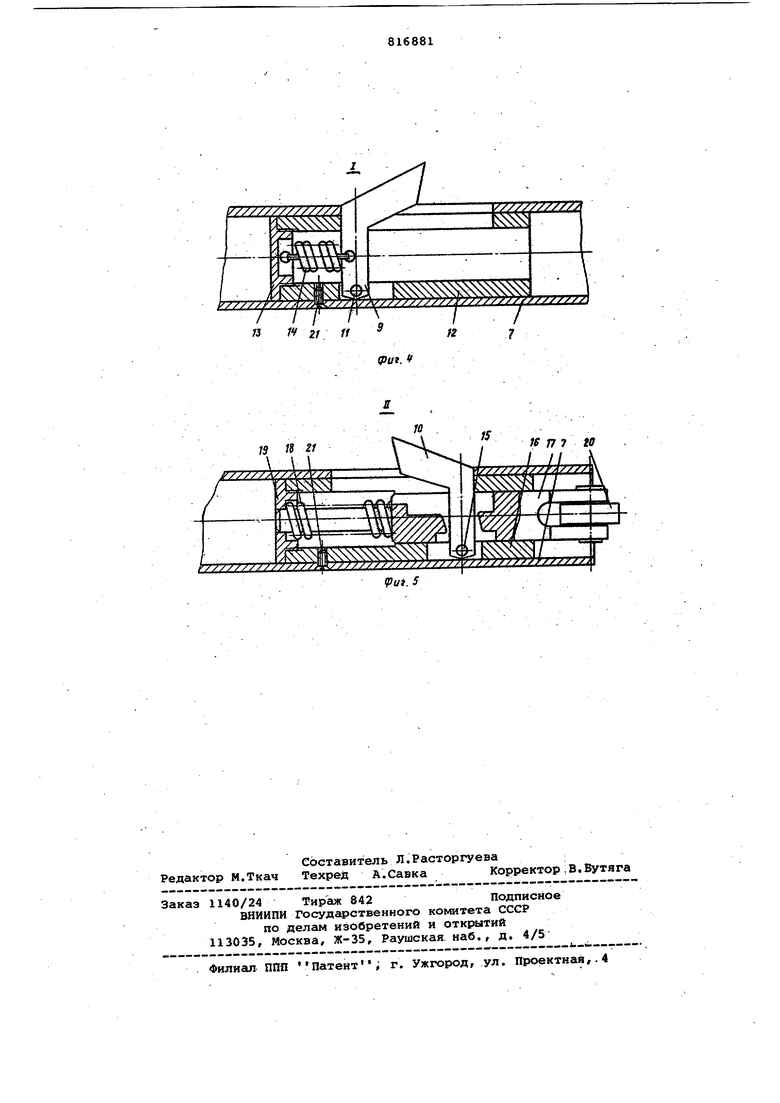
На фиг. 1 изображено устройство в аксонометрии, общий вид; на фиг. 2 то же, вид сверху; на фиг. 3 - разре А-А на фиг. 2; на фиг. 4 - узел 1 на фиг. 3; на фиг. 5 узел II на фиг. 3.
На вертикальной оси 1, которая посредством крюнштейна 2 жестко крепится к стойкам 3 основных направляющих грузонесущей дороги, в подшипниках имеет вбзможность вращаться стакан 4 механизма передачи тележек. К стакану 4 посредством кронштейнов 5 и 6 жестко крепятся в горизонтальной плоскости дополнительные параллельные между собрй поворотные направляющие 7 и 8. Дополнитель:ые направляющие 7 представляютсобой полые цилиндры с двумя вырезами, откуда выступают подпружиненный упор 9 и толкатель 10.
Подпружиненный упор 9 установлен на оси 11 в корпусе 12 и связан с крышкой 13 корпуса 12 посредством пружины 14. Толкатель 10 установлен на оси 15 в корпусе 16 и связан со штангой 17, которая одним концом посредством пружины 18 соединена с крьпикой 19 корпуса 16, при этом другой ее конец снабжен роликом 20, которь1й выступает за срез дополнительных направляющих 7 на величину, меньшую радиуса данного ролика.
Корпуса 12 ц 16 упора и толкателя вставляются -в поворотные дополнительные направляющие и фиксируются винтами 21. Фиксатор положения дополнительных направляющих выполнен из подпружиненной защелки с вырезом 22, котора установлена на оси 23 кронштейна 24, жестко закрепленного на оси 1, и связана с педалью 25 посредством тяги 26, а также из пластины 27, которые неподви:кно закреплены на поворотных .дополнительных направляющих с возможностью взаимодействия с вырезом защелки 22 в положении,когда дополнительны направляющие являются продолжением основных направляющих 28. Каждая осно ная на правляющая 28 снабжена пластиной 29, установленной с возможностью взаимодействия с роликом 20, толкателя 10 при стыковке дополнительной 7 и основной 28 направляющих. Ходовая тележка 30 перемещается по направляющим на ходовых роликах 31.
Ходовая т.ележка 20 заталкивается с основной направляющей 28 грузонесущей дороги на поворотную направляющую 7 (фиг. 1). При зтом ролики 31, наталкиваясь на подпружиненный упор
9,утапливают его. После того, как бба ролика 31 расположатся между упором 9 и толкателем 10, ходовая тележка будет зафиксирована. Затем нажимается педаль 25, при этом посредвом тяги 26 подпружиненная защелка 22 выводится из зацепления с пластиной 27, освобождая таким образом поворотные направляющие 7. Затем производится разворот поворотных направляющих вокруг вертикальной оси 1 против часовой стрелки. При развороте на 180- противоположно прикрепленная пластина 27 входит в разрез подпружиненной защелки 22, фиксируя поворотные направляющие.
При стыковке поворотных направляющих 7 с основными направляющими 28 грузонесущей дороги ролики 20 (фиг.5) взаимодействуют с пластиной 29. При этом ролик 20 передвигает толкатель
10,который его утапливает. После этого ходовая тележка беспрепятственно выталкивается на основную направляющую 28 грузонесущей дороги.
Применение предлагаемого устройства значительно уменьшает трудозатраты, связанные с передачей ходовых тележек с полуфабрикатом.
Формула изобретения
Подвесной конвейер, содержащий закрепленные на кронштейнах основные направляющие, установленные на основных направляющих тележки, и поворотный механизм передачи тележек с одной основной направляющей на другую с фиксатором его положения, о т л и чающийс я тем, что, с целью повйшения надежности передачи тележек при параллельном расположении основных направляющих,поворотный механизм передачи тележек выполнен из двух дополнительных параллельных направляющих,каждая из которых снабжена подпружиненным упором и толкателем с роликом, при этом каждая основная направляющая снабжена пластиной,установленнай с возможностью взаимодействия с роликом толкателя при стыковке дополнительной и основной направляющих.
Источники информации, принятые во внимание при экспертизе
1.Авторское свидетельство СССР № 632624, кл. В 65 G 47/60, 1975.
2.Авторское свидетельство СССР № 630147, кл. В 65 G 25/08, 1977 (прототип).
28
Ю
Z8
| название | год | авторы | номер документа |
|---|---|---|---|
| Подвесной конвейер | 1977 |
|
SU630147A1 |
| Тележечный конвейер | 1983 |
|
SU1097531A1 |
| МЕХАНИЗИРОВАННЫЙ МОДУЛЬНЫЙ ГАРАЖ | 2010 |
|
RU2459916C1 |
| Тележечный конвейер | 1985 |
|
SU1261858A1 |
| Автоматизированный склад | 1978 |
|
SU710874A1 |
| Устройство для перемещения и передачи подвесок с грузами | 1983 |
|
SU1133194A1 |
| Транспортное средство для перевозки и укладки рельсо-шпальной решетки бесстыкового пути | 1979 |
|
SU889503A1 |
| СПОСОБ ХРАНЕНИЯ АВТОМОБИЛЕЙ В ОТДЕЛЬНЫХ ВЗАИМОСВЯЗАННЫХ МОДУЛЯХ | 2011 |
|
RU2506386C2 |
| Горизонтально-замкнутый тележечный конвейер | 1980 |
|
SU977306A1 |
| ГОРИЗОНТАЛЬНО-ЗАМКНУТЫЙ ТЕЛЕЖЕЧНЫЙ КОНВЕЙЕР | 1973 |
|
SU366131A1 |

pi/i.3
/УУУХХХ/
K(f///
n
