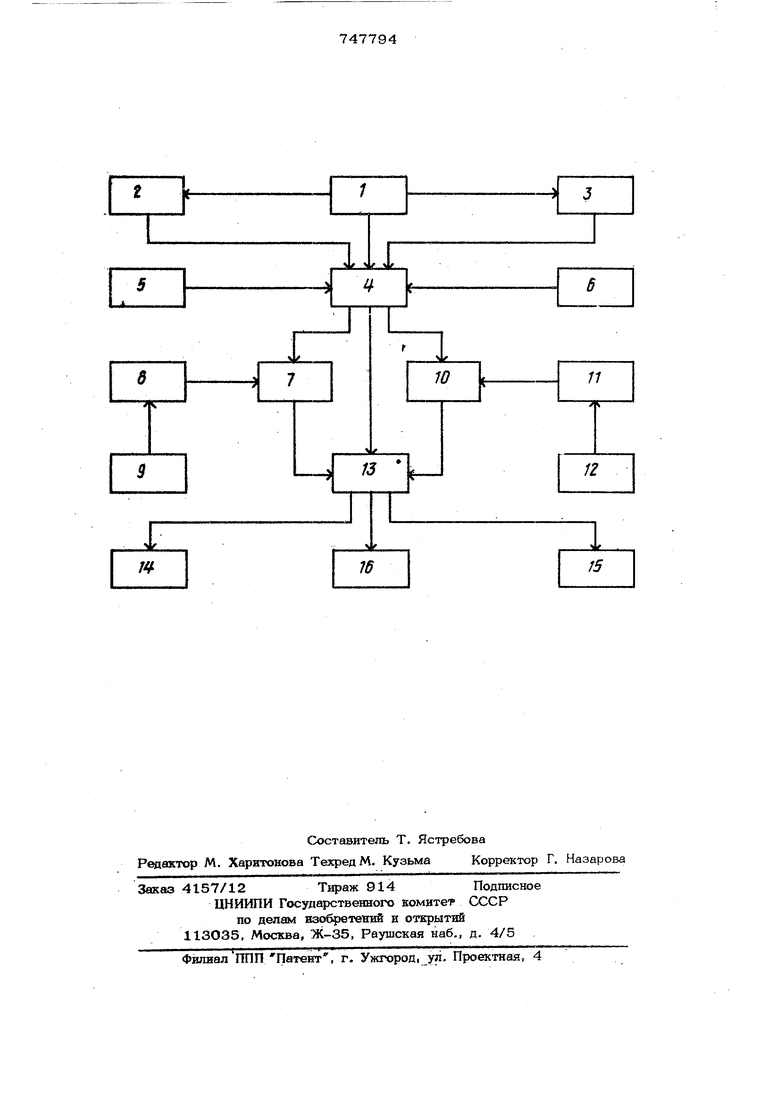
(54) УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКСГО УПРАВЛЕНИЯ ГРУЗОНОСИТЕЛЕМ Изобретение относится к области транспортировки и складирования грузов и может быть использовано для автоматизации транспортно-складских операций при хранении грузов в мнргоячейковьгх стеллажах. Известно устройство для автоматического управления груэоносителем, содержащее двоичные суммирующие счетчи дешифраторы, блоки управления и считывания, сумматоры, коммутатор и логические схемы I . Однако такое устройство имеёт невысокую надежность работы вследствие возможных сбоев при считывании информации. .. Наиболее близким к изобретению по технической сущности и достигаемому результату является устройство для автоматического управления грузоносителем, содержащее блок ввода информашш блок контроля и анализа, схемы совпаде ния, счетчики горизонтальных и вертикальных рядов, соединенные входом первый с датчиком горизонтального, а второй с датчиком вертикального перекрещений, и блок управления, выходы которого соединены с приводами груэоносителя, первый и второй входы - с выходами схем совпадения, а третий - с выходом лока контроля и анализа, одни из входов которого соединены с выходами блока ввода информации 2. Однако это устройство также имеет недостаточно высокую надежность работы, обусловленную тем, что останов груаоносителя возможен лищь при oaHOBp vieHHOM переполнении счетчиков в тикального и горизонтального адресов, т.е. тогда, когда горизЬнтальный и вертикальный адреса ячейки отработаны груэоносителем одновременно, что бывает крайне редко, кроме того, при обработке команд не учитывается состояние «гчеек, к которым адресуется груз. Цель изофетения- повышение надежности работы устройства. 1ЬстаБлет1ая цель достигается тем, что предлагаемое устройство сна6же11О детишками состояния и исходного положе ния, подключеннык-щ к другдал входам блока контроля и анализа, второй и третий выходы которого подключены к одному из входов cootBeTCTBeHHo- одной и другой схем совпадения, к другому входу одной из которых подзслючен выход счетчика горизонтальных рядов, а другой - выход счетчика вертикальных рядов. На чертеже изображена функционгшьная схема предлагаемого устройства, Устройство содержит блок 1, считывания, соединенный с регистром 2 г-оризонтального адреса и регистром 3 вертикального адреса, .1и в состав блока ввода информации, блок 4 контроля и анализа, подключенный к блоку 1 считывания, регистру 2 горизон тального адреса, регистру 3 вертикального адреса, датчику 5 исходного положения и датчику 6 состояния, схему 7 совпадения, соединенную через счетчик горизонтальных рядов с датчиком 9 гори зонтального перемещения, схему 1О сов падения , подключенную через счетчик 1 вертикальнь(х рядов к датчику 12 вертикального перемещения, и блок 13 управления, соединенный с блоком 4 контроля и анализа, схемой 7 совпадени схемой совпадения 1О, приводом 14 горизонтального перемещения, пр}шодом вертикального перемещения и приводом ; поворота. Устройство работает следующим образом. Адрес выбранной ячейки задается в блок 1 считывания вручную с пульта оператора, полуавтоматически адресным носителем информации или автоматическ из системы управления более высокого (например, ЭВМ). При этом могут иметь место ошибки, вызва шые сбоями в работе блока считыва1шя (объективные), и оигабкд, вы oanHbie неправильным набором на пульте оператора (субъективные). Для . обнаружения субъективных ошибок необходим контроль правильности набора адреса, а для обнаружения объективных ошибок - контроль достоверностивведен ной информации. 11)и вводе информашш номер горизон тального ряда ячейки записывается блоком 1 считывания в регистр 2 гор изо н сального адреса, а номер вертикального 44 яда - в регистр 3 вертикального адреса. iHOBpeMeinio блок 4 контроля и анализа осуществляет контроль достоверности вводшчюй икформашги (например, по нечетности). По окончании ввода информа1.ШИ блок 4 контроля и анализа индицирует адрес вь1бранной ячейки и проверяет, не превышает ли номер горизонтального и верт;-шального рядов выбранной ячейки колиг1ества горизонтальных и вертикальных рядов ячеек в стеллаже. Если превышает (грузоноситель адресован к несуществующей ячейке) или обнаружена ошибка при вводе и1-1формаиии (она со- держит четное количество единиц), то блок 4 контроля и анализа одновременно с индикацией адреса ячейки выдает звуковой или световой сигнал ошибки оператору н электрический в ЭВМ. При соответствии индицируемого введенного адреса ячейки вводимому и отс -тствии Сигнала ошибки оператор формирует команду пуск, по которой грузоноситель отправляется к выбранной ячейке. При работе с ЭВМ команда .пуск формируется блоком 4 контроля и анализа автоматически. По этой команде блок 4 контроля и анализа подключает регистр 2 горизонтального адреса к схеме совпадения 7, а регистр 3 вертикального адреса- к схеме 10 совпадения. Кроме того, блок 13 управления формирует команду приводу 14 горизонтального перемеще шя на перемещение грузоносителя вперед, а приводу 15 вертикального перемещения - на перемещение вверх . При прохонаде1-ши грузоносителем каждого горизонтального и вертикального ряда стеллажа импульсный сигнал датчика 9 горизонтального перемещения увеличивает. на единицу содержимое счетчика 8 горизонтальных рядов, а датчик 12 вертикального перемещения - содернсимое счетчика 11 вертикальных рядов. После накопления в счетчике 8 горизонтальных рядов числа, равного номеру горизонтальногчэ ряда выбратюй ячейки, срабатывает схема 7 совпадения и выдает сигнал в блок 13 уггравления на прекращение перемещения грузоносителя вперед. Аналогично после накопления в счетчнке 11 верт}жальных рядов числа, равного вертикальному ряду выбранной ячейки, срабгдтыва ет схема 10 совпадения и выдает сигнал блоку 13 управления на претфащенне перемещения Бверх. Затем блок 13 управления формирует команды приводу 16 поворота на
поворот платформы груэоноснтеля в сторону выбранного стеллажа и выполнение оптации положить - взять. При перемодении грузовой платформы для вьшолнения этих операций датчик 6 состояния, расположенный на ней, контролиует , состояние ячейки (занята, свободна). Епок 4 контроля и анализа анализирует соответствие состояния ячейки вьтолняемой операции. Если при вьтолнении
операции положить датчик состояния 6 выдает сигнал занята (т.е. в выбранно Ячейке уже находится груз) или при выйолнении операции -взять - сигнал свободна (т.е. в выбранной ячейке
отсутствует груз), то блок 4 контроля и анализа выдает сигнал блоку 13 управления на прекращение операций взятьположить. Кроме того, блок 4 контроля и анализа индицирует несоответствие состояния ячейки выполняемой операции, а 6jroK 13 управления выдает команды приводу 15 в тикального перемещения на перемещение грузоносителя вниз, а приводу 14 горизонтального перемещения назад . При соответствии состояния ячейки вьшолняемой операции, грузоноситеяь вьшолняет операцию взять - положить и затем по командам блок 13 управления перемещение вниз и назад При достижении грузоносителем исходного положения датчик 5 исходного положения через блок 4 контроля и анализа выдает сигнал блоку 13 управлени на прекращение перемещения грузоносителя вперед и вниз. Одновременно блок 4 контроля и анализа выдает сиг- нал оператору и в ЭВМ об окончании выполнения предыдущей операции. Последующее адресование грузоносителя и
управления п емвщени по заданному адресу осуществляются аналогично.
Формула изобретени
Устрюйство для автоматического управления груэоностепем, сод жащее блок ввода информации, блок контроля и анализа, схемы совпадения, счетчики горизситальных и вертикальных рядов, соединенные входом первый с датчиком горизонтельного, а второй с датчиком вертикального перемещений, и блок упраления, выходы которого соединены с приводами грузоносителя, первый и второй входы - с выходами схем совпадени а третий - с выходом блока контроля я анализа, одни из входов которого соедрнены с выходами блока ввода информации, отличающееся тем, что с целью повыщения надежности работы, оно снабжено датчиками состояния и исходного положения, подключенными к другим входам блока контроля и анализа второй и третий выходы которого подключены к одному из входов соответственно одной и другой схем совпадения, к другому входу одной из которых подключен выход счетчика горизонтальных рящов, а другой - выход счетчика вертикальных рядов.
Источники информации, принятые во внимание при экспертизе
1.Авторское свидетельство СССР № 426939, кл. В 65G 37/ОО, 1968.
rt
2,Авторское свидетельство СССР № 255116, кл. В 65 Q 37/ОО, 1969 (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для индикации положения грузоносителя | 1987 |
|
SU1537632A1 |
| Устройство для программного управ-лЕНия KPAHOM C дВуМя гРузОзАХВАТАМи | 1979 |
|
SU834672A1 |
| УСТРОЙСТВО АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ГРУЗОНОСИТЕЛЕМ | 1971 |
|
SU426939A1 |
| Устройство для адресования грузов | 1978 |
|
SU749762A1 |
| Устройство для программного управления автооператорами гальванической линии | 1987 |
|
SU1429089A1 |
| Устройство программного управления роботами гальванической линии | 1983 |
|
SU1124250A1 |
| Устройство для управления краном-штабелером | 1988 |
|
SU1558822A1 |
| Устройство программного управления автооператорами многопроцессных автоматических линий гальванопокрытий | 1982 |
|
SU1081243A1 |
| УСТРОЙСТВО для АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯШТАБЕЛЕРОМ | 1969 |
|
SU257577A1 |
| Устройство для централизованного контроля и оперативного управления | 1977 |
|
SU633029A1 |