(54) МИКРОМАНИПУЛЯТОР
| название | год | авторы | номер документа |
|---|---|---|---|
| МЙКРОМАНИПУЛЯТОРПАЯЙ^ЙО-ИШ^-'Й'Г0010С»иЯ!_)О—>&-''-"БИВ лис 'tKA | 1970 |
|
SU282028A1 |
| ОДТГНТНО- .;j^ I'^ Г^Х!:ЙМР(;КДЯ ^^^ IRVi!; "iHOTFk'i | 1966 |
|
SU179586A1 |
| МИКРОМАНИПУЛЯТОР | 1972 |
|
SU428933A1 |
| Микроманипулятор | 1974 |
|
SU511200A1 |
| МИКРОМАМ И П,УЛЯТОР | 1968 |
|
SU206980A1 |
| ЭЛЕКТРОМЕХАНИЧЕСКИЙ ПРИВОД | 1996 |
|
RU2098909C1 |
| МИКРОМАНИПУЛЯТОР | 1970 |
|
SU277515A1 |
| Магнитный держатель | 1981 |
|
SU981177A1 |
| ЭЛЕКТРОДНОЕ УСТРОЙСТВО И МАГНИТНЫЙ ЭЛЕКТРОСОЕДИНИТЕЛЬ | 2008 |
|
RU2371210C1 |
| УСТРОЙСТВО ДЛЯ СОВМЕЩЕНИЯ МИКРОЭЛЕМЕНТОВ | 1970 |
|
SU276703A1 |
1
Изобретение относится к машиностроению, а именно к микроманипуляторам, предназначенным для механизации и автоматизации технологических процессов, в частности для полупроводникового производства при изготовлении микросхем.
Наиболее близким решением из известных является микроманипулятор, содержаший неподвижную плиту, рычаг управления, расположенный в рукоятке и-шарнирно связанный длинным плечом с этой рукояткой, коротким - с плитой, а промежуточной частью - с сердечником электромагнита, установленного на двухкоординатном столе 1.
Недостаток указанного микроманипулятора заключается в том, что он имеет узкие технологические возможности, так как позволяет производить манипуляции на небольшой поверхности.
Целью изобретения является расширение технологических возможностей.
Это достигается тем, что он снабжен опорой, связанной с коротким плечом рычага управления и установленной с возможностью перемешения относительно неподвижной плиты, и постоянными магнитами, один из которых расположен в этой опоре, а второй - в рукоятке, причем разноименные полюса этих магнитов направлены к сердечнику электромагнита.
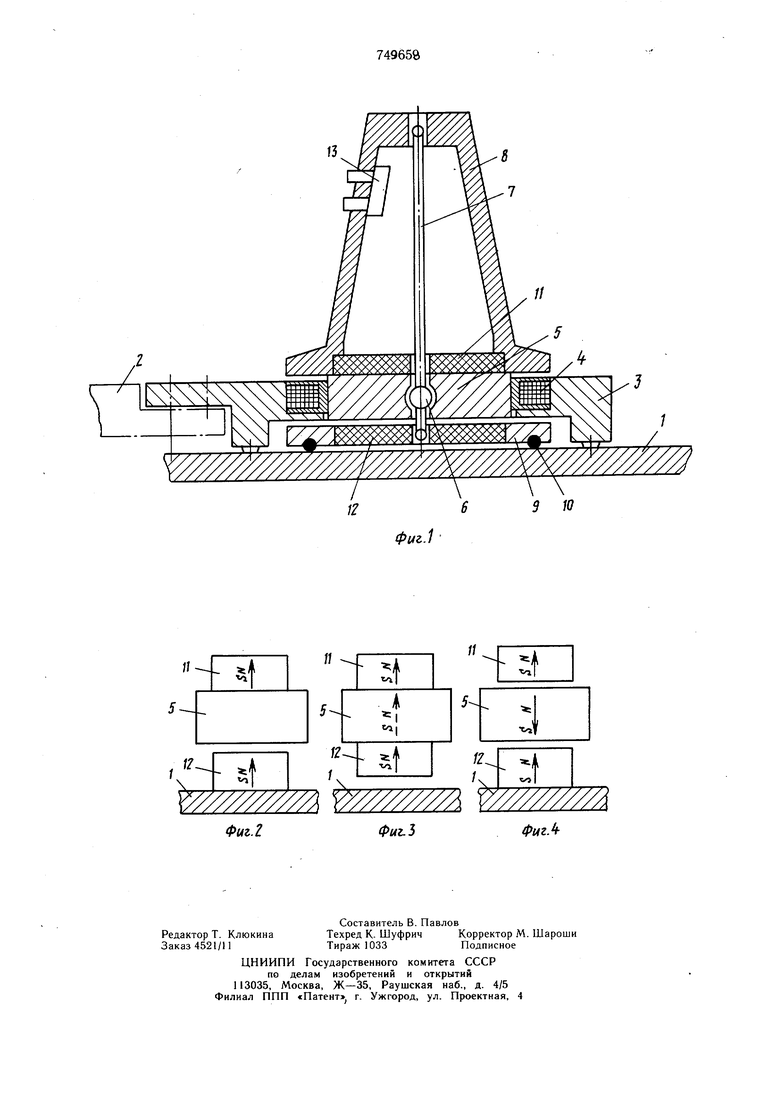
5 На фиг. 1 изображен общий вид микроманипулятора в разрезе; на фиг. 2 - положение магнитов, когда координатный стол зафиксирован относительно неподвижной плиты; на фиг. 3 - положение магнитов при грубом манипулировании; на фиг. 4 - положение магнитов при точном манипулировании.
Микроманипулятор содержит неподвижную плиту 1, на которой размещены двухкоординатный стол 2 и корпус 3, жестко связанные между собой. В корпусе 3 установлен электромагнит постоянного тока, состоящий из катушки 4 и железного сердечника 5, связанный при помоши шаровой опоры 6 с рычагом управления 7. На корпусе 3 расположена рукоятка 8, шарнирно
20 связанная сдлинным плечом рычага управления 7. Короткое плечо рычага управления 7 шарнирно соединено с плавающей опорой 9, снабженной кольцевым демпфером 10. В рукоятке 8 и плавающей опоре
9 закреплены постоянные магниты 11 и 12, обращенные разноименными полюсами к сердечнику 5 электромагнита. Питание катушки 4 электромагнита осуществляется от электросети переменного тока через выпрямитель. Переключение полярности питающей сети осуществляется при помощи двуххнопочного переключателя 13.
Микроманипулятор работает следующим образом.
В исходном положении катушка 4 отключена. Под действием постоянных магнитов 11 и 12 рукоятка 8 зафиксирована относительно сердечника 5, а плавающая опора 9 зафиксирована относительно плиты 1 (см. фиг. 2).
Вследствие этого оба конца рычага управления 7 находятся в зафиксированном положении, и двухкоординатный стол 2 также зафиксирован относительно неподвижной плиты 1 постоянным магнитом 12. При этом демпфер 10 находится в сжатом, напряженном положении.
Нажатием на верхнюю кнопку переключателя 13 подключают катушку 4 к сети постоянного тока. При этом сердечник 5 намагничивается таким образом, что его северный полюс обращен к южному полюсу постоянного магнита 11, а южный полюс обращен к северному полюсу постоянного магнита 12 (см. фиг. 3). Вследствие этого плавающая опора 9 притягивается к корпусу 3 и магнитные силы между постоянным магнитом 12 и плитой 1 ослабевают. После этого отпускают кнопку переключателя 13, отключая тем самым катушку 4 от электросети. В этом положении оба конца рычага управления 7 также находятся в зафиксированном относительно корпуса 3 положении, но между плитой 1 и плавающей опорой 9 образуется зазор. После этого, перемещая рукоятку 8, осуществляют грубое (с передаточным отношением 1:1) перемещение двухкоординатного стола 2 по плоскости плиты 1. Так как в этом положении опора короткого плеча рычага управления 7 не связана с плитой 1, то можно производить неограниченное перемещение двухкоординатного стола 2 по всей площади плиты 1.
При нажатии на другую кнопку переключателя 13 изменяется полярность подключения катушки 4 к электросети. При этом сердечник 5 намагничивается таким образом, что его северный полюс обращен к северному полюсу постоянного магнита 12, а южный полюс - к южному полюсу постоянного магнита И (см. фиг. 4). В этом положении плавающая опора 9 фиксируется относительно неподвижной плиты 1, а между корпусом 3 и рукояткой 8 образуется «магнитная подущка. Перемещая рукоятку относительно горизонтальной плоскости корпуса 3, производят точное манипулирование двухкоординатным столом 2 с передаточным отношением, равным отношению длин короткого и длинного плеча рычага управления 7. Микроманипулятор имеет более широкие технологические возможности по сравнению с известными манипуляторами, так как он обеспечивает при помощи одной рукоятки манипулирование столом на неограниченной площади. Это позволяет использовать манипулятор не только для совмещения рисунка фотошаблона с рисунком полупроводниковой подложки по меткам совмещения при фотолитографии, но и для визуального контроля и оптического измерения размеров элементов микросхем на пластинах большого диаметра.
Формула изобретения
Микроманипулятор, содержащий неподвижную плиту, рычаг управления, расположенный в рукоятке и шарнирно связанный длинным плечом с этой рукояткой, коротким с плитой, а промежуточной частью - с сердечником электромагнита, установленного на двухкоординатном столе, отлинающий ся тем, что, с целью расширения технологических возможностей, он снабжен опорой, связанной с коротким плечом рычага управления и установленной с возможностью перемещения относительно неподвижной плиты, и постоянными магнитами, один из которых расположен в этой опоре, а второй - в рукоятке, причем разноименные полюса этих магнитов направлены к сердечнику электромагнита.
Источники информации, принятые во внимание при экспертизе
V////// ////////
X.
7/////////A
Фиг.1
9 10
ФигЛ
