Предлагаемый микроманипулятор может быть применен в производстве полупроводниковых и электровакуумных приборов, научноисследовательских работах в области биологии, физики твердого тела, микрогравировки и др.
Известен микроманипулятор для пространственного перемещения двухкоординатного стола, передача к которому от рычага управления выполнена в виде двух раздельно включаемых электромагнитов - для грубого и точного перемещения. Первый электромагнит связан через шарнир с рычагом управления, а второй - с пантографом, связанным шарнирно с электромагнитом грубого перемещения и с корпусом. Однако такой микроманипулятор труден в изготовлении и эксплуатации.
Особенностью предложенного микроманипулятора является то, что двухкоординатный стол выполнен в виде трех пластин, связанных между собой при помощи плоских пружин. Верхняя такая пружина закреплена на корпусе, а нижняя опирается на щаровую головку рычага управления. Последний снабжен телескопически входящим в него подпружиненным стержнем, имеющим головку, которая щарнирно связана с регулируемым по высоте упором. Этот упор установлен на корпусе. Рабочий столик смонтирован на промежуточной плите, жестко связанной с нижней
пластиной двухкоординатного стола. Это упрощает его изготовление и эксплуатацию.
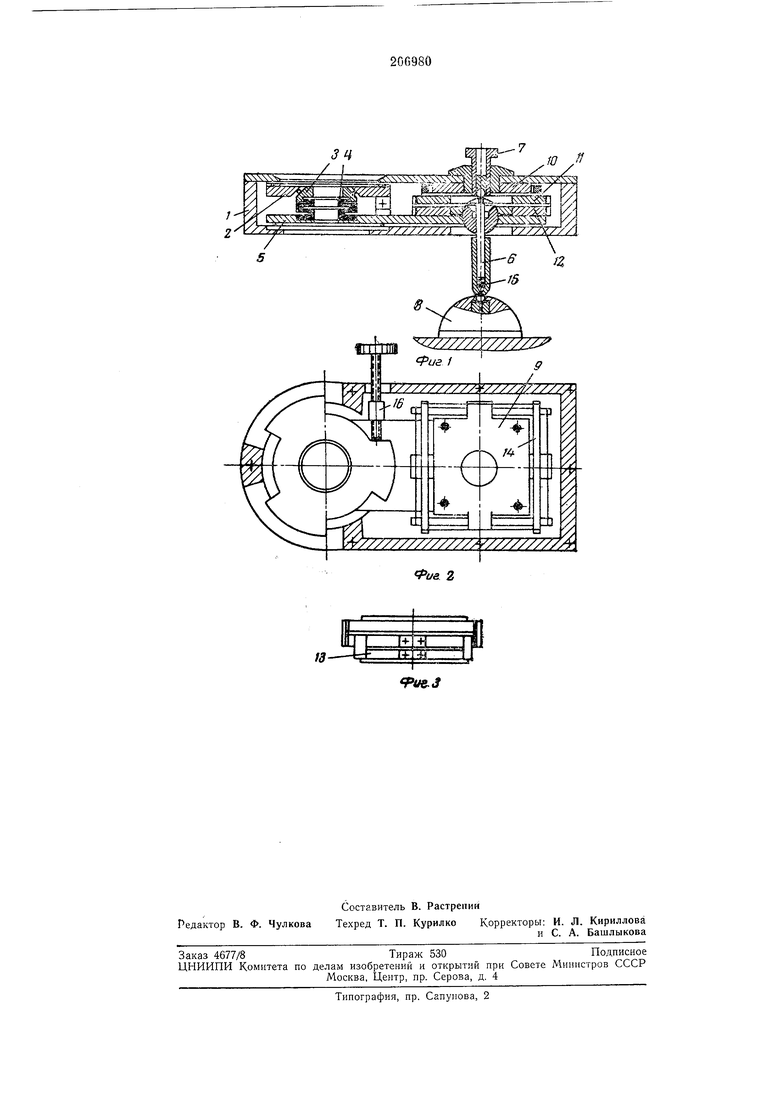
Па фиг. 1 изображен предлагаемый микроманипулятор, общий вид; на фиг. 2 - то же, вид сверху (со снятой крышкой); на фиг. 3 - крестовый плоско-пружинный стол, вид спереди.
Микроманипулятор выполнен из расположенного в корпусе / рабочего столика 2, опирающегося сверху через шариковую опору на корпус, а снизу через шариковую опору на конусную втулку 3, упругий элемент 4 - на промежуточную плиту 5. Последняя также через шариковую опору опирается на корпус. Упругая втулка устраняет торцовые биения конической втулки и промежуточной плиты относительно корпуса.
Перемещается промежуточная плита 5 те- лескопическим рычагом 6, шарнирно связанным с этой плитой. Верхний конец рычага шарнирно укреплен при помощи гайки 7, а нижний шарнирно соединен с рукояткой 8, которая перемещается по нижней поверхности корпуса /.
Промежуточная плита при помощи плоскопружинного крестового двухкоординатного стола 9 связана с корпусом 1. В результате этого она может перемещаться только тогда, когда этому не препятствует крестовый двухкоординатный стол, представляющий собой три пластины 10, 11, 12. Каждые две соседние
пластины сообщены между (Собой двумя плоскими пружинами 13, в которых сделана прот дольная прорезь. Верхняя пластина 10 жестко закреплена на корпусе, а нижняя 12 - на плите 5. Концы пружин 13 попарно соединены стержнями 14. При поворотах рычага 6 работает либо одна пара пружин, либо другая, либо обе, что позволяет этому рычагу, плите 5, а значит и рабочему столику 2 перемещаться только прямолинейно. Пружина 15 служит для предотвращения люфтов в шарнирах рычага 6.
Плоскопружинный крестовый двухкоординатный стол 9 копирует движения рукоятки 5 рабочим столиком 2 с высокой точностью. Так как можно регулировать плечи рычага, легко меняют масштаб перемещений и производят очень точные малые перемещения без разворотов.
Поворачивается рабочий столик относительно корпуса винтовым механизмом 16.
Предмет изобретения
1. Микроманипулятор, содержащий корпус, двухкоординатный стол и рабочий столик.
а также рычаг с рукояткой управлений, снабженный шаровой головкой, входящей в соответствующее гнездо, имеющееся в двухкоординатном столе, отличающийся тем, что, с целью упрощения его изготовления и эксплуатации, двухкоординатный стол выполнен в виде трех связанных между собой при помощи плоских пружин пластин, из которых верхняя жестко закреплена на корпусе, а нижняя опирается на щаровую головку рычага управления, который снабжен телескопически входящим в него подпружиненным стержнем, имеющим головку, щарнирно связанную с регулируемым по высоте упором, установленным на
корпусе; при этом рабочий столик смонтирован на промежуточной плите, жестко связанной с нижней пластиной двухкоординатного стола.
2. Микроманипулятор по п. 1, отличающийся тем, что рабочий столик опирается сверху на корпус через щариковую опору, а снизу - также через щариковую опору на конусную втулку, связанную упругим элементом с промежуточной плитой.
34
Ю 
| название | год | авторы | номер документа |
|---|---|---|---|
| ОДТГНТНО- .;j^ I'^ Г^Х!:ЙМР(;КДЯ ^^^ IRVi!; "iHOTFk'i | 1966 |
|
SU179586A1 |
| Микроманипулятор | 1974 |
|
SU511200A1 |
| МИКРОМАНИПУЛЯТОР | 1972 |
|
SU327537A1 |
| Микроманипулятор | 1978 |
|
SU749658A1 |
| УСТАНОВКА ДЛЯ ПРИВАГ»КИ ПРОВОЛОЧНЫХ ВЫВОДОВ | 1971 |
|
SU297090A1 |
| ДВУХКООРДИНАТНЫЙ МИКРОМАНИПУЛЯТОР | 1969 |
|
SU255004A1 |
| Микроманипулятор | 1972 |
|
SU441689A1 |
| ОЮЗИДЯ[ ПйТР-"?^" T'-V'"'' " •п' Й1Й i Lti>& ii;^" S;. А;';. •->& | 1973 |
|
SU371063A1 |
| УСТРОЙСТВО ДЛЯ ОДНОСТОРОННЕЙ КОНТАКТНОЙ ТОЧЕЧНОЙ МИКРОСВАРКИ | 1972 |
|
SU356069A1 |
| УНИВЕРСАЛЬНЫЙ ДЕРЕВООБРАБАТЫВАЮЩИЙ СТАНОК | 1994 |
|
RU2064860C1 |