1
Изобретение касается производства полупроводниковых приборов, и может быть использовано в прецизионном оборудовании для совмещения рисунка кристалла с базовым шаблоном при ТОЧНО1Й монтаже кристал лов в корпусе интегральных схем.
Известен микроманипулятор, содержащий двухкоординатный стол, пере мешающийся от рукоятки с рычагом управления,, причем рычаг управления имеет в средней части плавающую опору. Однако известный микроманипулятор не обеспечивает быстрые координатные пеоемещения.
Предлагаемый микроманипулятор отли-т чается тем, что система передачи переме-. щений выполнена ввиде кадаюшегося Т-образной стойки, верхняя часть которой шарнирно соединена с. плоской кареткой двумя параллельными тягАми равной длины, а поводок связан со средней опорой рычага управления и с плоской кареткой.
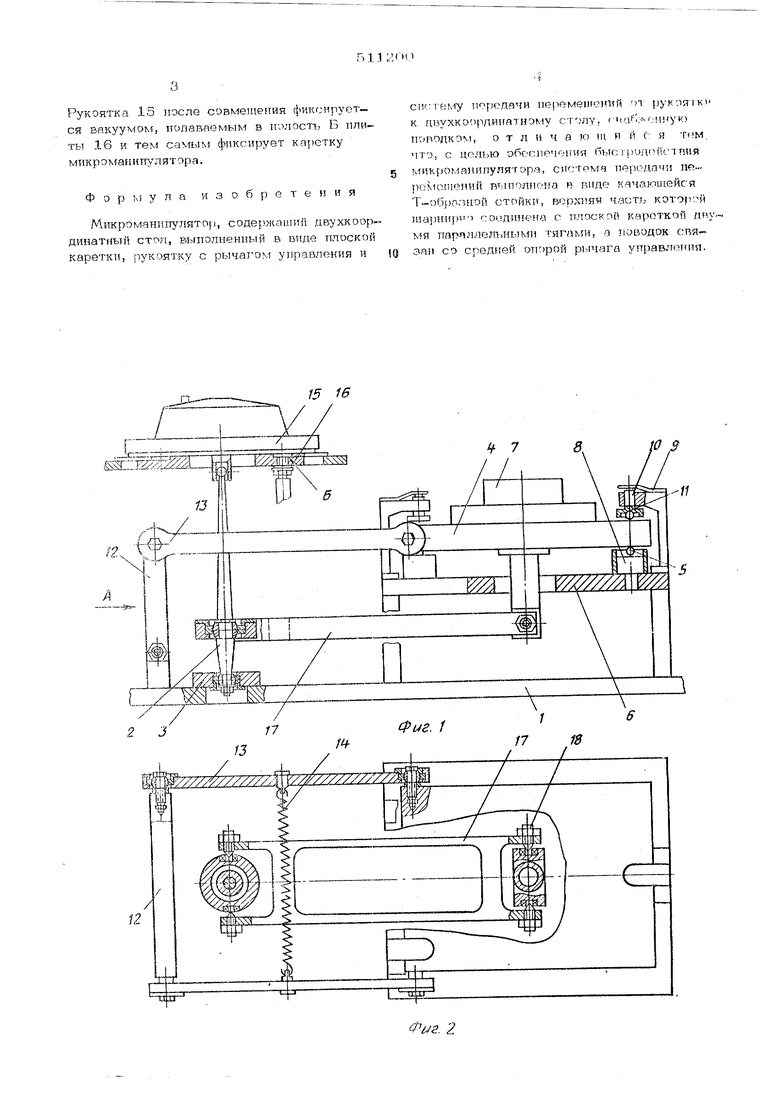
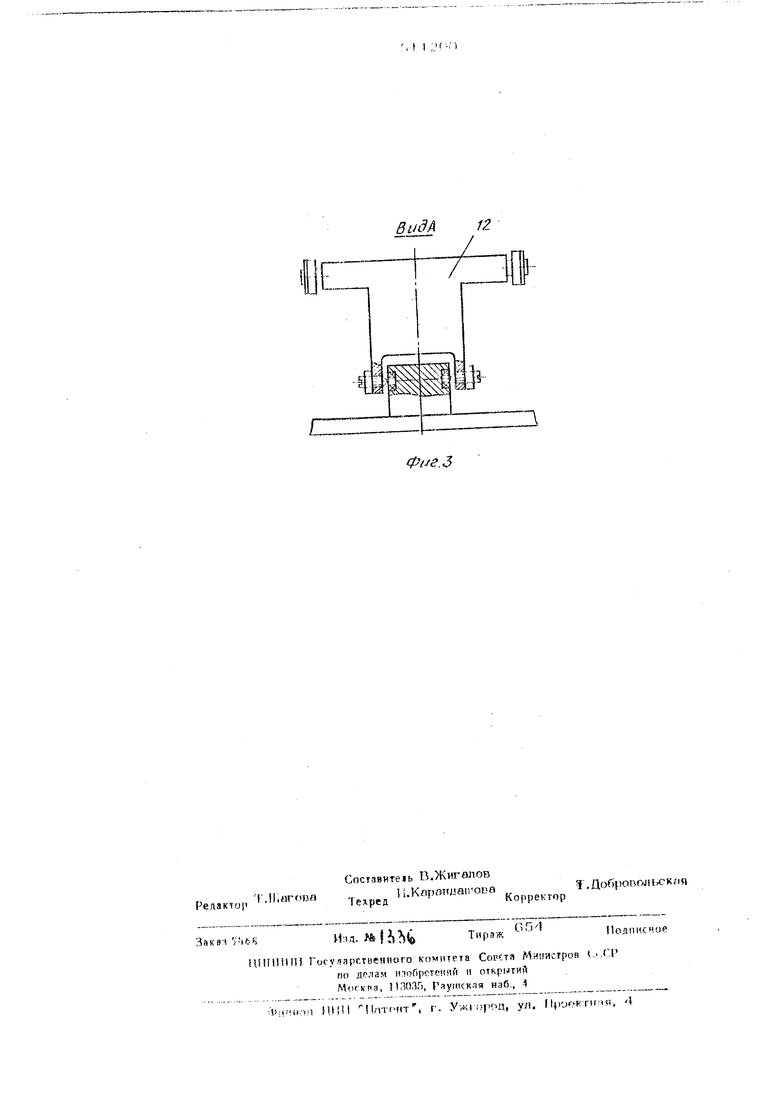
На фиг. 1 и 2 показаны основные виды микроманипулятора; на фиг., 3 - вид по стрелке А на фиг. 1.Микроманипулятор содержит плиту 1, рычаг 2 управления с неподвижной опорой3, двухкоординатный стол, выполненный в виде, плоской каретки 4, перемещающийся 5 на шариковых опорах 5 относительно неподвижной плиты 6, а также предметный стол 7. Каретка установлена на трех шариковых опорах на cToiiKax 8, сверху поджата пружинами 9 через толкатели 10 и щарнки 11.
Каретка манипулятора соединена с качающейся в центрах стойках 12 двумя тягами 13 равной длины. Соединение тяг с кареткой и качающейся стойкой выполнено на шарнирных подшипниках. Для устранения
5 люфтов в шарнирных подшипниках тяги соединены между собой пружиной 14.
Микроманипулятор работает следующим образом, При перемещении рукоятки 15 по фиксирующей- плите 16 рычан 2. качается
0 относительно чеподвижной опоры 3, установленной на шарнирном подшипнике, и перемещает каретку через поводок 17. Соединение поводка с кареткой и рычагом выполнено на центрах 18. Передаточное чис-
5 ло определяется отношением длин плеч V
Рукоятка 15 после совмещения фиксируется вакуу 40к, ттопаваемым в полости.-, Б плиты 16 и тем самым фиксирует каретку микрохтанипулятора.
Ф о р Ki у л а изобретения
Микромаштулятор, содержащий двухкоор. динатный стоп, вьяюлненпый в виде плоской каретки, рукоятку с рычагом управления и
СИ .: 1екгу по юдпчи перемемилшй п рук .1я1К1 к двухкоордипатному , ntufl.M-.ijiHyK) поводком, о т л и ч а ю in и ( г я тем. что. с 11е,1ью обеспечения быс iiU;4(iic nvifl микрома)и пулятора, система ттередачи перемещений въ1поляоиа R виде качающейся Т-об}.)ГПной стойки, верхняя частт,- котор.:м1 )11а)Л1И}Я соединена с плоской кареткой двумя парпллел1 нымп тягами, а поводок связан со средней опорой piiinara упрашгения.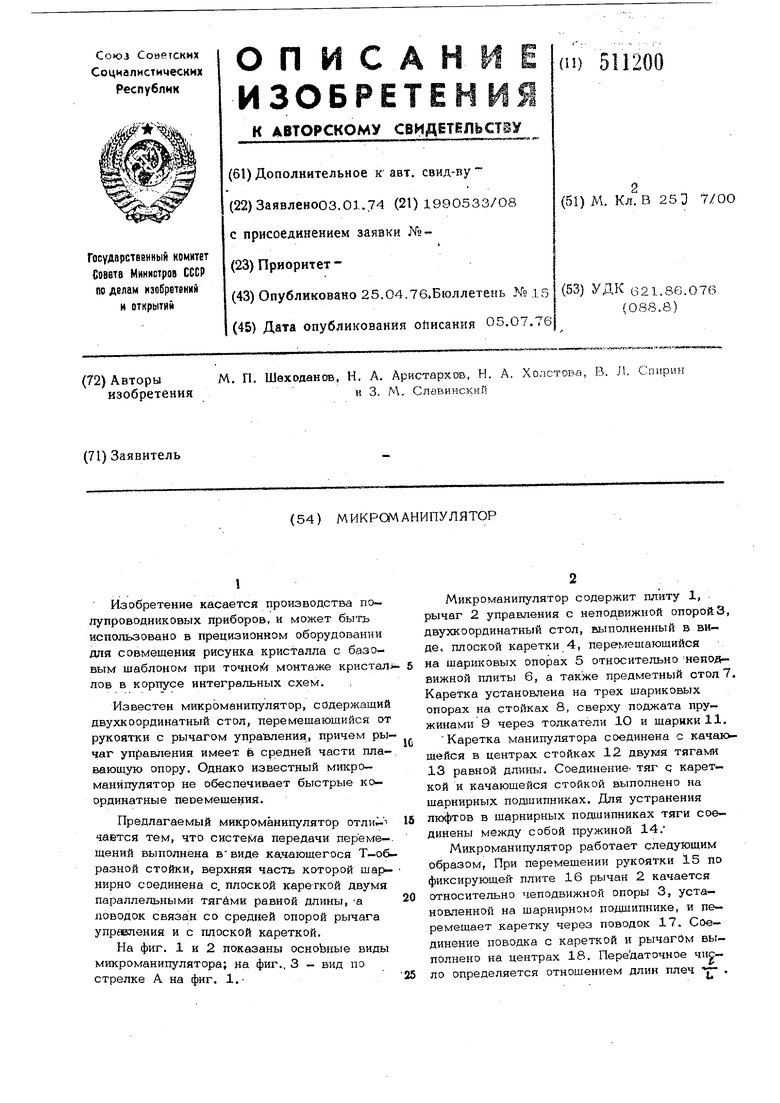
| название | год | авторы | номер документа |
|---|---|---|---|
| Двухкоординатный стол | 1979 |
|
SU781008A1 |
| МИКРОМАМ И П,УЛЯТОР | 1968 |
|
SU206980A1 |
| СИЛОВОЕ УСТРОЙСТВО К КОМПЬЮТЕРУ ДЛЯ УПРАВЛЕНИЯ ВИРТУАЛЬНЫМ САМОЛЕТОМ | 2012 |
|
RU2498833C1 |
| Микроманипулятор | 1978 |
|
SU749658A1 |
| МЙКРОМАНИПУЛЯТОРПАЯЙ^ЙО-ИШ^-'Й'Г0010С»иЯ!_)О—>&-''-"БИВ лис 'tKA | 1970 |
|
SU282028A1 |
| ОЮЗИДЯ[ ПйТР-"?^" T'-V'"'' " •п' Й1Й i Lti>& ii;^" S;. А;';. •->& | 1973 |
|
SU371063A1 |
| ОДТГНТНО- .;j^ I'^ Г^Х!:ЙМР(;КДЯ ^^^ IRVi!; "iHOTFk'i | 1966 |
|
SU179586A1 |
| МИКРОМАНИПУЛЯТОР | 1972 |
|
SU327537A1 |
| ОБРАБАТЫВАЮЩИЙ ЦЕНТР С ГИБРИДНОЙ КИНЕМАТИКОЙ | 2013 |
|
RU2572112C2 |
| ОСНОВНАЯ ОПОРА ШАССИ САМОЛЕТА | 2007 |
|
RU2370413C2 |
15
fPiJS. 2 16
BE:
Вид 12
/
7
Фие.
