Изобретение преднаГзначёнб для перемещения предметов на малое расстояние и лГоЖёт быть использовано в производствё полугГрбводниковых и электровакуумных .приборов.
Известны .микраманнпуляторы, на корпусе которых размещены двухкоординатный стол, фи1ксируемый электромагнитом, рукоятка улравления и система передачи перемещений от рукоятки к двухкоординатному столу.
Предложенный микроманипулятор отличается от известных тем, что система передачи перемещений от рукоятки к двухкоординатному столу выполнена в виде двух рычагов, имеющих одинаковую длину плеч, шарнирно взаимодействующих со столом и тягой, соединенной с рычагом управления, который в средней части имеет плавающую ofiopy, фиксируемую электромагнитом. Такое выполнение ми|Кроманипулятора упрощает его конструкцию.
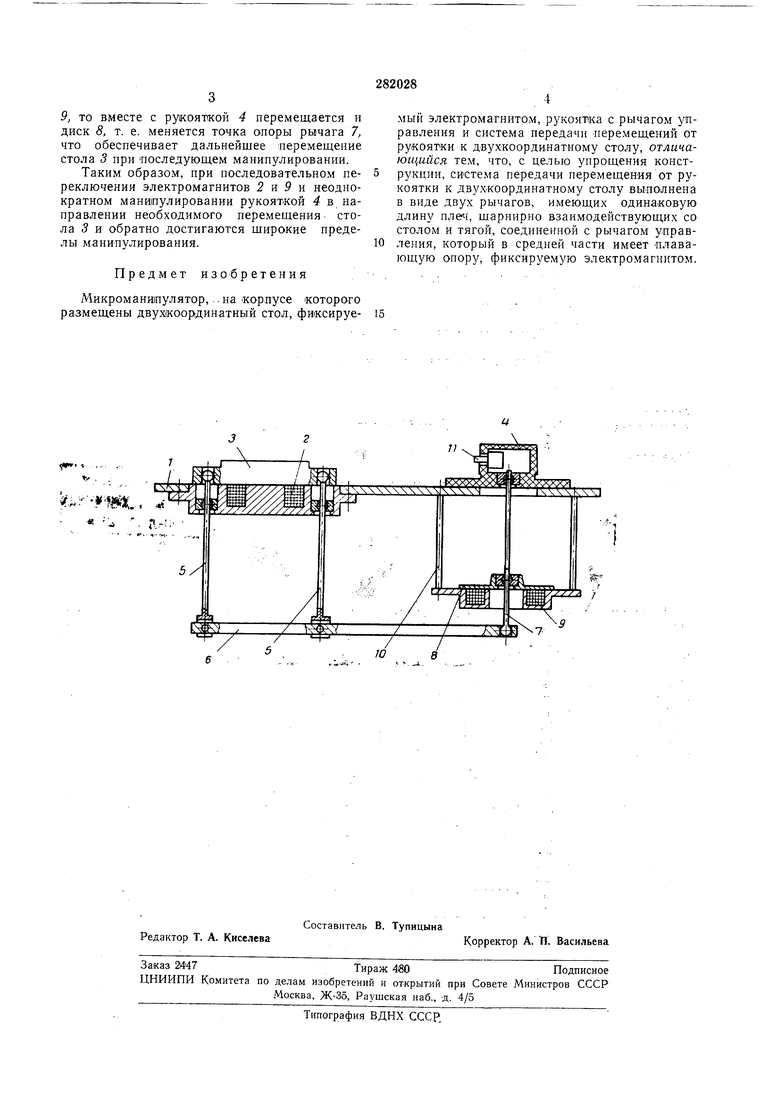
На чертеже показан предлагаемый микрома.ннпулятор.
Микромани1пулятор содержит корпус, выт полненный в виде плиты /, к -которой крепится электромагнит 2 для фивкюации от перемещения стола 3. На одной плите со столом-расположена рукоятка - управления с возможню стью свободного перемещения, взaимoдeйCtвующая со столом через щарнирно устанобленную систему рычагов 5, тягу 6, и рвма 7
управления. Причем пара рычагов 5 имеет одинаковую длину (Плёч, а рычаг управления имеет плавающую опору, выполненную в виде диска 5, который может жестко фиксироваться электромагнитом 9, прикрепленным к корпусу Шпильками 10.
Плавающая опора дает возможность изменять точку опоры рычага 7 управления в горизонтальной плоскости при манипулировании.
Управление электромагнитом 2 и Р осуществляется электрическим переключателем // кнопочного типа, вмонтированным в рукоятку 4.
Нажатием на кнопку переключателя // включают электромагнит 9 на замыкание с диском 5, чем обеспечивается жесткая фиксация плавающей опоры рычага 7 управления. Перемещая рукоятку 4 по плите, производят манипулирование двукоординатным столом 3, так как он шарнирн связан с рукояткой парой рычагов 5, тягой 6 и рычагом 7 управления.
Если за пол,ный ход рукоятки 4 достаточного перемещения стола не достигнуто, то производят переключение электромагнитов 2 и Р кнопкой переключателя // и возвращают в исходное положение рукоятку 4. А- так как стол 3, а с ним рычаги 5 и тяга 6 жестко зафиксированы электромагнитом 2, а диск плавающей dnojjbi рычага 7 разомкнут с электромагнитом 9, то вместе с рукояткой 4 перемещается и диск 8, т. е. меняется точка опоры рычата 7, что обеспечивает дальнейшее перемещение стола 3 при последующем манипулировании. Таким образом, при паследовательном переключении электромагнитов 2 и 9 и неоднократном манипулировании рукояткой 4 в направлении необходимого перемещения стола 5 и обратно достигаются щирокие пределы манипулирования. Предмет изобретения Микроманипулятор,. .на корлусе которого размещены двухкоординатный стол, фиксируемый электромагнитом, рукоятка с рычагом управлепия и система передачи перемещений от рукоятки к двухкоординатпому столу, отличающийся тем, что, с целью упрощения конструкции, система передачи перемещения от рукоятки к двухкоординатному столу вылолнена в виде двух рычагов, имеющих одинаковую длину плеч, шарнирно взаимодействующих со столом и тягой, соединенной с рычагом управления, который в средней части имеет Плавающую опору, фиксируемую электромагнитом.
| название | год | авторы | номер документа |
|---|---|---|---|
| МИКРОМАНИПУЛЯТОР | 1972 |
|
SU428933A1 |
| Микроманипулятор | 1978 |
|
SU749658A1 |
| ОДТГНТНО- .;j^ I'^ Г^Х!:ЙМР(;КДЯ ^^^ IRVi!; "iHOTFk'i | 1966 |
|
SU179586A1 |
| МИКРОМАМ И П,УЛЯТОР | 1968 |
|
SU206980A1 |
| МИКРОМАНИПУЛЯТОР | 1970 |
|
SU277515A1 |
| Микроманипулятор | 1974 |
|
SU511200A1 |
| УСТРОЙСТВО ДЛЯ СОВМЕЩЕНИЯ МИКРОЭЛЕМЕНТОВ | 1970 |
|
SU276703A1 |
| ШВЕЙНЫЙ ПОЛУАВТОМАТ | 1973 |
|
SU379704A1 |
| СИЛОВОЕ УСТРОЙСТВО К КОМПЬЮТЕРУ ДЛЯ УПРАВЛЕНИЯ ВИРТУАЛЬНЫМ САМОЛЕТОМ | 2012 |
|
RU2498833C1 |
| Предохранительное устройство для круглопильного станка | 1980 |
|
SU980980A1 |
