Известны микроманипуляторы для перемещения предметов на малое расстояние, содержащие корпус, размещенный в нем двухкоординатный стол, шарнпрно связанный с рычагом управления, опирающимся через шаровой шарнир на ввинчиваемую в корпус резьбовую обойму, и перемещаемую но плите корпуса рукоятку управления, шарнирно связанную с рычагом управления. Такие манипуляторы не обеспечивают перемещения инструмента с повышенной точностью.
Предлагаемый манипулятор отличается от известных тем, что в нем установлены воздействующие на двухкосрдииатный стол электромагниты точного и грубого перемещения, свянанпые между собой пантографом, а в корпусе установлен электромагнит фиксации.
Это обеспечивает двухступенчатое быстрое и точное замедленное перемещение в горизонтальной плоскости двухкоординатного стола и фиксацию его в определенпом положении.
Кроме того, вертикальное перемещение инструмента осуществляется при помощи расположенного в вертикальных направляющих двухкоординатного стола рабочего столика, опирающегося через ролик па профилироваииый кулачок со шкивом, котор з1Й связан тросом с рукояткой управления.
и электровакуумных приборов, а также для биологнческих исследований.
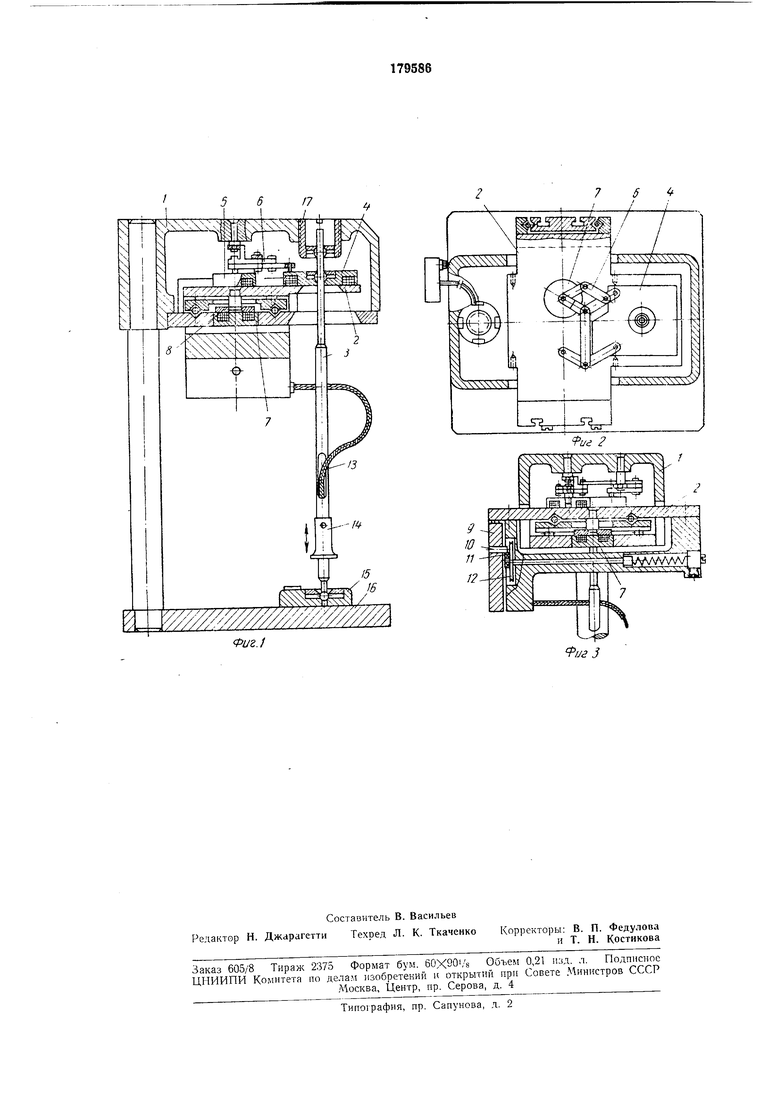
На фиг. 1 изображен нредлагаемый микроманипулятор, продольный разрез; на фиг. 2 - то же, поперечный разрез; на фиг. 3 - двухкоординатный стол с пантографом, в плане.
Микромапипулятор выполнен в виде расположенного в корпусе / двухкоординатного стола 2, связанного с рычагом управления 3
или непосредственно через электромагнит 4 грубого перемещения, шарнирно установленный па рычаге 3, или через электромагнит 5 точного перемещения, который связан с электромагнитом 4 через пантограф 6, конечный
шарнир которого закреплен в корпусе У.
Кроме того, для фиксации двухкоординатпого стола 2 в определенном положении в корпусе / закреплен электромагнит 7 фиксации, взаимодействующий с двухкоординатным
столом 2 через плавающий якорь 5 и связанный с электромагнитами перемещения 4 и 5 так, что они выключаются при включении электромагнита 7 фиксации. Для вертикального перемещения инструмента в вертикальных направляющих двухкоординатного стола 2 помещен рабочий столик 9, палец 10 которого опирается на профилированный кулачок //, жестко связанный со щкивом 12, вращающимся при помощи троса 13,
ния 3. Свободный конец этого рычага шарнир 10 соединен с рукояткой управления 15, перемещаемой по плите j6 корпуса.
Для изменения масштаба перемещений двухкоординатного стола 2 шарнирная шаровая опора рычага управления 3 располол ена в резьбовой обойме 17, ввинчиваемой в корпус 1, что позволяет изменять соотношение плеч рычага управления 5.
Включая электромагнит 4 грубого перемещения на замыкание с двухкоординатным столом 2 последний перемещают ускоренно и грубо, а при включении электромагнита 5 последний перемещает двухкоординатный стол замедленно и точно, так как движение электромагнита 5 передается от рычага управления 3 через пантограф 6, причем при включении электромагнита 5 электромагнит 4 отключается.
Предмет изобретения
1. Микроманппулятор для пространственного перемещения инструмента рычагом управления, связанным шарнирно с корпусом, с передачей к двухкоординатному столу, несущему инструмент, и с рукояткой, подвижной по горизонтальной плите корнуса, отличающийся тем, что, с целью обеспечения быстрого предварительного и замедленного точного перемещения инструмента, передача от рычага управления к двухкоординатному столу выполнена в виде системы двух раздельно включаемых электромагнитов - для грубого и точного перемещения, из которых первый связан через шарнир с рычагом управления, а второй - с пантографом, один из шарниров которого связан с электромагнитом грубого перемещения, а другой - с корпусом.
2.Микроманппулятор но п. 1, отличающийся тем, что, с целью обеспечения возможности
фиксации двухкоординатного стола в определенном положении, в корпусе установлен электромагнит фиксации, воздействующий на установленный на двухкоордннатном столе якорь и связанный с электромагнитами грубого и
точного перемен1,ения так, что при его включении оба электромагнита неремещения отключаются.
3.Микроманипулятор но пп. 1 и 2, отличающийся тем, что для неремещения инструмента
в вертикальной плоскости он снабжен механизмом вертикального перемещения, выполненным в виде рабочего столика, который через ролик опирается на установленный в корпусе профилированный кулачок со шкивом,
связанным тросом с рукояткой унравления.
4.Микроманипулятор по пп. 1-3, отличающийся тем, что, с целью предварительной установки масштаба неремещеннй двухкоординатного стола путем изменения нлеч рычага, в его корпусе установлена резьбовая обойма с шаровой опорой для рычага управления.
Фиг.}
иг 2
Риг 5
| название | год | авторы | номер документа |
|---|---|---|---|
| МИКРОМАМ И П,УЛЯТОР | 1968 |
|
SU206980A1 |
| МИКРОМАНИПУЛЯТОР | 1970 |
|
SU277147A1 |
| ОЮЗИДЯ[ ПйТР-"?^" T'-V'"'' " •п' Й1Й i Lti>& ii;^" S;. А;';. •->& | 1973 |
|
SU371063A1 |
| Микроманипулятор | 1978 |
|
SU749658A1 |
| Многошпиндельный гравировальный копировально-фрезерный станок | 1953 |
|
SU116956A2 |
| МИКРОМАНИПУЛЯТОР | 1970 |
|
SU277515A1 |
| МИКРОМАНИПУЛЯТОР | 1972 |
|
SU327537A1 |
| МЙКРОМАНИПУЛЯТОРПАЯЙ^ЙО-ИШ^-'Й'Г0010С»иЯ!_)О—>&-''-"БИВ лис 'tKA | 1970 |
|
SU282028A1 |
| УСТРОЙСТВО ДЛЯ СОВМЕЩЕНИЯ МИКРОЭЛЕМЕНТОВ | 1970 |
|
SU276703A1 |
| ДВУХКООРДИНАТНЫЙ МИКРОМАНИПУЛЯТОР | 1969 |
|
SU255004A1 |