:1
Известны микроманипуляторы, в которых плавающий двухкоординатный стол, шарнирио связанный с рычагоМ управления, перемещается в горизонтальной .плоскости с помощью механизма масштабного копирования и связанного с ним электромалнита.
Предлагаемый микроманинулято-р отличается тем, ЧТО он снабжен планшайбой, на торцовой поверхности которой установлен плавающий рабочий стол и укреилев электромагнит прихвата, связывающий рабочий стол с поворотной планшайбой.
Это обеспечивает возможность углового леремещения сохранением неизменного положения геометрической оси вращения рабочего стола в горизонтальной плоскости.
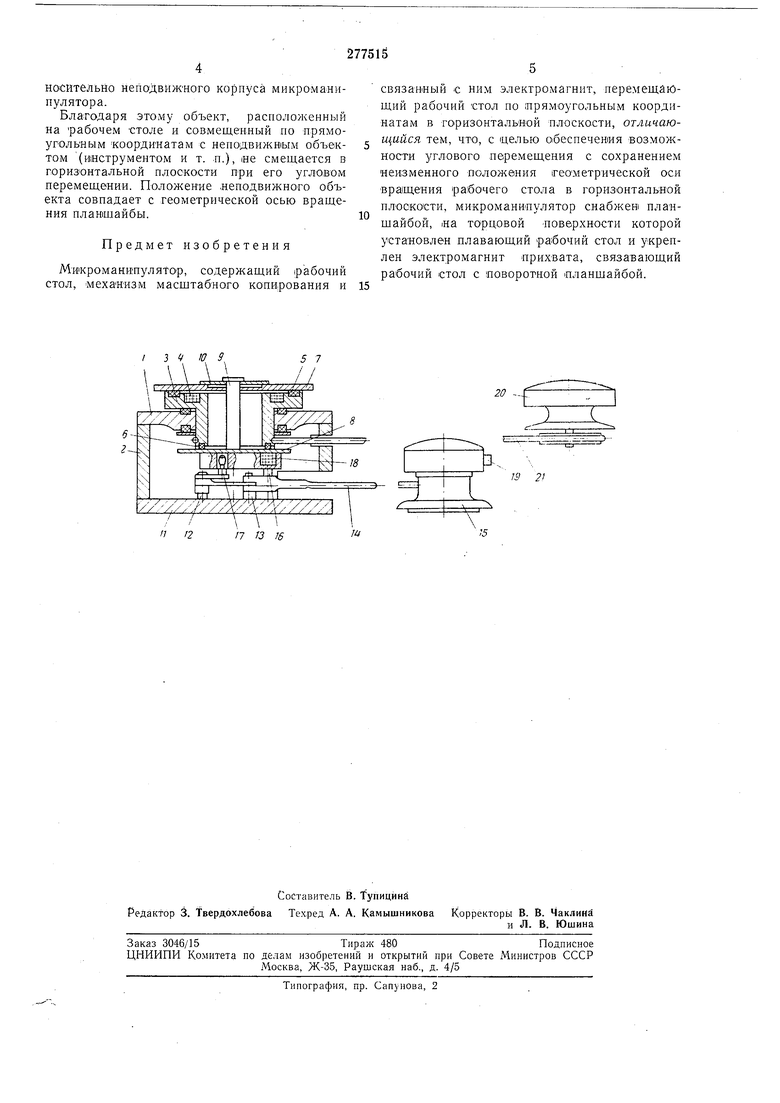
На чертеже изображен мавипулятор в разрезе.
В неподвижной опоре / корлуса 2 манииулятора расположена поворотная шайба 3 с вмонтированным в нее электромагнитом 4 прихвата. По опорным кольцам 5 и б планщайбы 3 перемещаются рабочий стол 7 и пластина 8, соединяемые стержнем 9 и прижимаемые к опорным кольцам мембранной пружиной 10. В основании // корпуса 2 закреплены пальцы 12 и 13 механизма масщтабного копирования 14, представляющего собой пантограф с рукояткой /5 перемещения в-горизокггальной плоскости по прямоугольным координатам. Па пальцах 16 и /7 механизма масштабного копирования 14 сидит электромагнит 18, контактирующий с пластиной 8.
Для выставления объекта в заданную точку нажатием кнопки 19 отключают электромагнит 4 прихвата и включают электромагнит 18. Затем передвигают рукоятку J5 с нажатой кнопкой 19 через механизм масщтабного копирования 14, который обеспечивает передаточное отношение для повыщения точности перемещений. После этого передвигают электромагнит 18, который, в свою очередь, перемещает пластину 8 и связанный с Н1ей через
стержень 9 рабочий стол 7. Отпуская кнопку 19, отключают электромагнит 18 и одновременно Включают электромагнит 4 прихвата, фиксирующий рабочий стол 7 с объектом, закрепленным на нем, в заданной выставленной
точке. Для разворота объекта вращают рукоятку 20, свя13анную с вращающейся щайбой 3 гибкой связью 21. Так как ось планщайбы 3 постоянна, то и рабочий стол 7, прихваченный электромагнитом 4 прихвата к планщайбе 3, имеет ту же ось вращения. Таким
образом, достигается неизменность положения
геометрической оси вращения рабочего стола
носительно неподвижного корпуса микроманипулятора.
Благодаря этому объект, расположенный на рабочем Столе и совмещенный по прямоугольным координатам с неподвижным объектом Xинструментом и т. .п.), «е смеш,ается в горизонтальной плоскости при его угловом перемещении. Положение .неподвижного объекта совпадает с геометрической осью вращения планшайбы.
Предмет изобретения
Микроманипулятор, содержащий рабочий стол, механизм масщтабного копирования и
связанный с ним электромагнит, перемещающий рабочий СТОЛ по ;прямоугольным координатам в горизонтальной плоскости, отличающийся тем, что, с целью о беспечения возможности углового перемещения с сохранением неизменного положения геометрической оси вращения рабочего стола в горизонтальной плоскости, микроманипулятор снабжен: планщайбой, 1на торцовой -поверхности которой установлен плавающий рабочий стол и укреплен электромагнит прихвата, связавающий рабочий стол с поворотной планщайбой.
| название | год | авторы | номер документа |
|---|---|---|---|
| Манипулятор | 1976 |
|
SU744788A1 |
| МИКРОМАНИПУЛЯТОР | 1972 |
|
SU428933A1 |
| Микроманипулятор | 1978 |
|
SU749658A1 |
| МЙКРОМАНИПУЛЯТОРПАЯЙ^ЙО-ИШ^-'Й'Г0010С»иЯ!_)О—>&-''-"БИВ лис 'tKA | 1970 |
|
SU282028A1 |
| Устройство для сборки тонкостенных изделий | 1974 |
|
SU524654A1 |
| ОДТГНТНО- .;j^ I'^ Г^Х!:ЙМР(;КДЯ ^^^ IRVi!; "iHOTFk'i | 1966 |
|
SU179586A1 |
| ПРИСПОСОБЛЕНИЕ ДЛЯ ЗАТОЧКИ КРИВОЛИНЕЙНЫХ РЕЖУЩИХ КРОМОК ИНСТРУМЕНТОВ ТИПА РЕЗЦОВ | 1970 |
|
SU279361A1 |
| Многошпиндельный гравировальный копировально-фрезерный станок | 1953 |
|
SU116956A2 |
| ФРЕЗЕРНЫЙ СТАНОК | 1969 |
|
SU252049A1 |
| МНОГОЗВЕННЫЙ ШАРНИРНО-РЫЧАЖНЫЙ МЕХАНИЗМ ДЛЯ МАСШТАБНОГО КОПИРОВАНИЯ | 1970 |
|
SU270927A1 |
/ 3 /7 13 16
