I
Изобретение относится к области грузоподъемных механизмов,а именно к лебедкам.
По основному авт. св. № 301441 известен способ автоматического управления предохранительной лебедкой, работающей на пластах пологого, наклонного и крутого падения с синхронизацией работы приводов и механизма подачи выемочной машины и регулировкой производительности насоса гидропривода лебедки по величине усилия натяжения ее тягового органа и положения статора гидронасоса, по которому выключают привод лебедки при нулевом положении статора гидронасоса 1.
Недостаток этого способа заключается в том, что зависание выемочной машины на канате предохранительной лебедки происходит при движении ее вверх, а при движении выемочной машины вниз и обрыве ее тягового органа она зависает на канате лебедки только в том случае, если лебедка самотормозяш,аяся. В случае применения лебедки с цилиндрической передачей торможения не происходит, и выемочная машина под действием собственного веса сползает вниз лавы со скоростью, которая ограничена максимальной скоростью предохранительной лебедки, что создает аварийную ситуацию.
Цель изобретения - повышение безопасности ведения горных работ, а именно, обеспечение надежного зависания выемочной машины на канате предохранительной лебедки в случае обрыва ее тягового органа независимо от направления движения выемочной машины и типа редуктора предохранительной лебедки.
10
Это достигается тем, что выключают с выдержкой времени привод лебедки при максимальном положении статора ее гидронасоса.
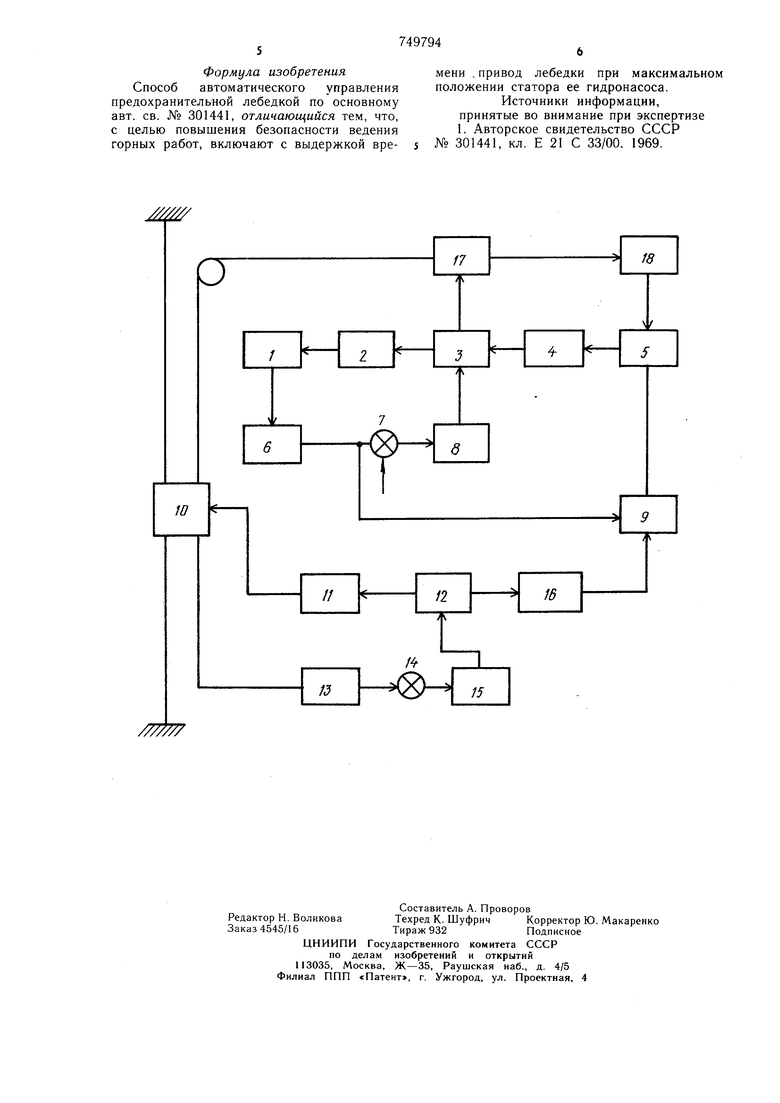
Предлагаемый способ поясняется принципиальной схемой.
15
На схеме показаны лебедка 1, гидродвигатель 2, гидронасос 3, электродвигатель 4, пускатель 5, датчик 6 натяжения, устройство 7 сравнения, регулятор 8, устройство 9 управления, выемочная машина 10 гидродвигатель 11 подачи, реверсивный насос 12, датчик 13 скорости подачи, устройство 14 сравнения, регулятор 15, датчик 16 положения статора насоса привода полачи, датчик 17 эксцентриситета статора насоса привода лебедки и реле 18 времени. Усилие в канате лебедки 1 с гидроприводом, включающим . гидродвигатель 2 и гидронасос 3, связанный с электродвигателем 4, который питается от пускателя 5, измеряется датчиком 6, выход которого подан через устройство 7 сравнения на регулятор 8 и непосредственно на устройство 9 управления, которое включает пускатель 5. Регулятор 8 управляет перемещением статора гидронасоса 3. Скорость подачи выемочной мащины 10 с гидроприводом, включающим гидродвигатель 11 и реверсивный насос 12, измеряется датчиком 13 выход которого через устройство 14 сравнения подан на регулятор 15, управляющий гидронасосом 12. В гидронасосе 12 установлен датчик 16, выход которого подключен к устройству 9 управления. В гидронасосе 3 лебедки 1 установлен датчик 17, выход которого через реле 18 времени подключен к пускателю 5. Усилие натяжения каната лебедки контролируется датчиком 6 и сравнивается в устройстве 7 с заданным значением натяжения. Сигнал рассогласования через регулятор 8 управляет статором гидронасоса 3, обеспечивая поддержание заданного усилия натяжения в канате лебедки. Реверс лебедки производится по заданным граничным значениям, причем граничное значение усилия на разматывание каната с барабаЯа предохранительной лебедки настраивается таким образом, чтобы оно превышало составляющую веса выемочной машияы, направ„1енную в сторону ее сползания, а граничное усилие для включения лебедки на наматывание каната настраивается значительно меньшим, чем составляющая веса выемочной машины (Р|«ит- G - 3 б т в зааисимости от веса выемочной машины и угла падения пласта). Таким образом, невозможен реверс лебедки без предварительного реверса выемочной машины. Рабочее усилие на наматывание и разматывание каната настраивается одинаковым, причем таким образом, чтобы оно было ниже составляющей веса выемочной машины, но выше граничного усилия реверса лебедки на наматывание каната. При движении выемочной машины 10 вверх усилие в тяговом органе лебедки снижается до величины заданного граничного натяжения на намотку каната. Срабатывает устройство управления, включается пускатель 5, на электродвигатель 4 подается напряжение, лебедка начинает выбирать канат до тех пор, пока сигнал рассогласования усилий, поступающий на регулятор 8, не станет равным нулю, т. е. усилие в тяговом органе лебедки достигает значения рабочего усилия. При дальнейшем движении выемочной машины вверх контур регулирования натяжения лебедки поддерх ивает усилие в тяговом органе лебедки, равным заданному рабочему значению. При остановке выемочной машины и усилии в канате, равном заданному рабочему значению, статор гидронасоса лебедки находится в нулевом положении и датчик 17 через реле 18 времени отключает пускатель 5. При движении выемочной мащины 10 вниз усилие в тяговом органе лебедки растет до величины заданного граничного усилия на разматывание каната. Срабатывает устройство управления, схема лебедки перестраивается на разматывание каната, включается пускатель 5, подается напряжение на электродвигатель 4, лебедка начинает отдавать канат. Усилие в канате лебедки снижается до величины заданного рабочего значения и поддерживается в этих пределах при дальнейщем движении выемочной машины вниз. При обрыве тягового органа механизма подачи при движении выемочной машины 10 вверх усилие натяжения тягового органа лебедки возрастает по сравнению с заданным рабочим значением. Контур регулирования натяжения тягового органа лебедки, настроенный для работы вверх, отрабатывает это возрастание и уменьшает производительность насоса гидропривода лебедки до нуля. Статор насоса устанавливается в нуле, и датчик 17 через реле 18 отключает пускатель 5. Выемочная мащина зависает на тяговом органе предохранительной лебедки. При обрыве тягового органа механизма . подачи при движении выемочной мащины вниз усилие натяжения тягового органа лебедки возрастает по сравнению с заданным рабочим значением. Контур регулирования натяжения тягового органа лебедки, настроенный для работы вниз, отрабатывает это возрастание и увеличивает производительность насоса гидропривода лебедки до максимума. Статор гидронасоса 3 имеет максимальный эксцентриситет, датчик 17 через реле 18 с выдержкой времени отключает пускатель 5, и выемочная машина зависает на тяговом органе предохранительной лебедки. Отключение пускателя 5 через реле 18 времени производится для исключения возможности отключения лебедки при кратковременных отклонениях усилия в канате от рабочего значения. Таким образом, отключение привода лебедки при максимальном положении статора ее гидронасоса с выдержкой времени обеспечивает надежное зависание выемочной машины при обрыве ее тягового органа и повышает безопасность ведения горных работ. Годовой экономический эффект от применения автоматизированной предохранительной лебедки с системой управления по предлагаемому способу составляет 16700руб,
Формула изобретения Способ автоматического управления предохранительной лебедкой по основному авт. св. № 301441, отличающийся тем, что, с целью повышения безопасности ведения горных работ, включают с выдержкой времени ,привод лебедки при максимальном положении статора ее гидронасоса.
Источники информации, принятые во внимание при экспертизе 1. Авторское свидетельство СССР № 301441, кл. Е 21 С 33/00. 1969.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ | 1971 |
|
SU301441A1 |
| Устройство для автоматического управленияпРЕдОХРАНиТЕльНОй лЕбЕдКОй | 1978 |
|
SU831967A1 |
| СИСТЕМА УПРАВЛЕНИЯ ГИДРОПРИВОДОМ ПРЕДОХРАНИТЕЛЬНОЙ ЛЕБЕДКИ УГОЛЬНОГО КОМБАЙНА | 1973 |
|
SU377512A1 |
| Устройство для автоматического управления предохранительной лебедкой | 1976 |
|
SU638722A1 |
| Рабочее оборудование экскаватора-драглайна | 1989 |
|
SU1666650A1 |
| Рабочее оборудование карьерного экскаватора-драглайна | 1989 |
|
SU1668571A1 |
| Устройство для автоматического управленияпРЕдОХРАНиТЕльНОй лЕбЕдКОй | 1977 |
|
SU798295A1 |
| Устройство для подачи и точного останова хлыстов раскряжовочной установки | 1980 |
|
SU919867A1 |
| Устройство для подачи и точного останова хлыстов раскряжевочной установки | 1980 |
|
SU906690A1 |
| Кабелеукладочная машина | 1981 |
|
SU1033660A1 |
