(54) РЕГУЛЯТОР
| название | год | авторы | номер документа |
|---|---|---|---|
| Регулятор | 1980 |
|
SU947822A1 |
| Автоматический регулятор | 1983 |
|
SU1120282A1 |
| Частотно-импульсный регулятор | 1985 |
|
SU1287100A1 |
| Следящая система | 1988 |
|
SU1529175A2 |
| Система автоматического регулирования | 1978 |
|
SU752221A1 |
| Следящая система | 1984 |
|
SU1216773A1 |
| Самонастраивающаяся система комбинированного регулирования | 1985 |
|
SU1254433A1 |
| Регулятор электрической мощности переменного тока(его варианты) | 1981 |
|
SU983690A1 |
| СПОСОБ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ПАРАМЕТРАМИ ЭЛЕКТРОМЕХАНИЧЕСКОЙ СИСТЕМЫ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2010 |
|
RU2414048C1 |
| ЭЛЕКТРОМЕХАНИЧЕСКИЙ ПРИВОД С ТОРМОЗНЫМ УСТРОЙСТВОМ | 1992 |
|
RU2066873C1 |
1
Изобретение предназначено для использования в системах автоматического уп равления, работающих по принципу отклонения.
Известны автоматические регуляторы, в которых применяются принципы нелинейной коррекции с целью улучшения дтгяамических характеристик систем l и 2,
Известные регуляторы не устраняют противоречия между статической и динамической точностью .
Из известных регуляторов наиболее близким по технической сущности является регулятор, содержащий блок вьщеления моду71я сигнала рассогласования, линейный , блок и последовательно соединенный измеритель рассогласования, управляемый усилитель .
При использовании этого регулятора улучшение динамических свойств систетлы 2о достигается только для определенного уровня входного воздействия, что значительно ограничивает область его примен&ния.
Цель изобрэтения повышение Д1шамй ческой и стат тч9ской точности и быстродействия регулятора.
Это достигается тем, что в известный регулятор введены компаратор, преобразователь модуля сигнала рассогласования во. временной интервал и ключ, при этом вход компаратора соедикен с выходом измерителя рассогласования, выход со стробирукущим входом преобразователя модуля ла рассогласования во вра енной интервал, управляющий вход которого соединен с выходом блока выделения модуля сигнала рассогласования, а выход соед1гаен с управляющим вxoдo f ключа, вход которого соединен с выходом блока выделения модуля сигнала рассогласования, а выход соединен с входом линейного блока.
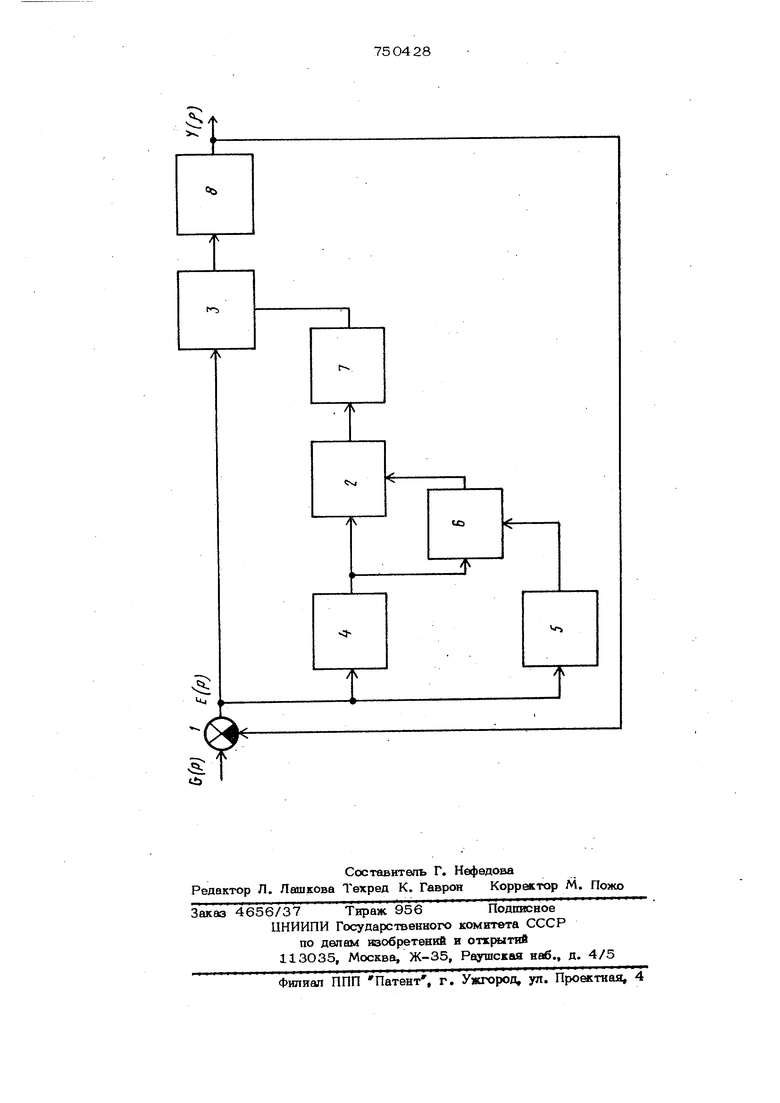
На чертеже представлена функциональ™ ная схема предлагаемого автоматического регулятора.
Автоматический регулятор содержит измеритель рассогласования 1, ключ 2, управлягалый усилитель.3, блок 4 выделения модуля сигнала рассогласования, компаратор 5, преобразователь 6 модуля сигнала рассогласования во временной интервал, линейный блок 7. На чертеже также показано включение объекта управления 8 в замкнутую систему автоматического управления. Автоматический регулятор работает следующим образом. Измеритель сигнала рассогласования 1 выявляет разность между сигналом задания и сигналом обратной связи. В статическом состоянии регулирования коэффициента передачи регулятора не происходит и его значение равно максимальному. При включенном ключе 2 происходит регулировка коэффициента передачи управляемого усилителя 3 в функции модуля сигнала рассогласования (ошибки), который формируется на выходе блока 4 выделения модуля сигнала рассогласования, при увеличении ошибки коэффициент передачи усилителя уменьшается. Таким образом, при малых ошибках сохраняется высокий коэффициент передачи системы, при больших ошибках коэффнЩ1ент передачи управляемого усилителя уменьшается, что уменьшает перерегулирование и колебав тельность переходных процессов. С целью начальной форсировки системы в переходном процессе в регулятор введена схема регулируемого запаздыБания канала изменения коэффициента передачи регулятора. состошцаяиз компаратора 5, преобразова теля сигнала ошибки во временной штервал 6 и ключа 2. Компаратор 5 срабатывает при превышении сигнала рассогласования некоторого заданного уровня и форь мирует стробирующий сигнал для запуска преобразователя 6. В течении времени, определяемого интегральной ошибкой системы ключ 2 разомкнут сигналом с выхода преобразователя 6. При этом коэффициент передачи регулятора максимален, чем и обеспечивается начальная форси / ровка. Линейный блок 7 представляет собой в простейшал случае фильтр верхних частот с частотой среза, определяемой полосой пропускания системы. Регулировкой передаточных характерис тик преобразователя 6 и линейного блока 7 можно в широких пределах изменять ДИ намические свойства системы при сохранении высокого : коэффициента передачи системы в установившемся режиме. Таким образом можно обеспечить пере ходный процесс без перерегулирования, при этом время затухания переходного процес са практически равно времени первого согласования исходной системы. Передаточная характеристика преобразователя 6 выбирается с учетом динамических свойств объекта управления 8. Введение предлагаемого регулятора в систему автоматического управления поэволяет реализовать больший коэффициент передачи системы по сравне1гаю с исходным, что увеличивает точность отработки входных воздействий. При этом устраняет ся перерегулирование и уменьшается время переходных процессов, что увеличивает также и динамическую точность системы. Кроме того, устранение перерегулирования уменьшает удары в механических передачах, что предотвращает их прежде временный износ. Формула изобретения Регулятор, содержащий блок вьщело- ния модуля сигнала рассогласования, линейный блок и последовательно соединенные измеритель рассогласования и управляющий усилитель, отличающийс я тем, что, с целью повьпиения статической и динамической точности и быстродействия, регулятор содержит преобразователь модуля сигнала рассогласования во временной интервал, ключ и компаратор, вход которого соединен с выходом измерителя -рассогласования, выход со стробиР ™ преобразователя мс ДУ™ сигнала рассогласования во времен.ный интерва.л, управляющий вход которого соединен с выходом блока выделения модуля сигнала рассогласования, а выход с управляющим входом ключа, вход которого соединен с выходом блока выделения модуля сигнала рассогласования, а выход - со входом линейного блока. Источники информации, принятые во внимание при экспертизе 1.Хлыпало Е, И. Нелинейные системы Ештоматическогх регутшрования,-Энергия, 1967, с, 336, 2.Пальтов И, П. Качество процессов и синтез корректирующих устройств в нелинейных автоматических системах,-Наука, 1975, с. 317. 3.Барбашин,, Е, А., Печоргша И, М. и Эйдинов Р, М. Применение систем автоматического регулирования с перемерной структурой для регулирования одного класса линейных статических объектов.Автоматика и телемеханика, 1963, № 1 (прототип).
