Изобретение предназначено .для использования в системах автоматичес- . кого управления, работающих по принципу отклонения.
Известен способ регулирования самонастраивающейся системы с эталонной моделью, в котором измеряется разностный сигнал между сигналами и их производными с выходов объекта регулирования и эталонной модели, накапливается совокупность этих сигналов с помощью интегратора и периодически перестраиваются параметры регулятора в соответствии с накопленным сигналом . .
Недостатком известного способа является сложность технической реализации.
Наиболее близким по технической сущности к предлагаемому является устройство, содержащее измеритель рассогласования, управляемый, усилитель, блок вьщеления модуля, компаратор, преобразователь модуля во временной интервал, ключ, фильтр, в котором осуществляется плавная регулировка коэффициента дтередачи системы при задержке начала регулировки, пропорциональной величине модуля сигнала рассогласования 23.
Это устройство позволяет в широких пределах изменить динамические свойства системы, однако имеет тот недостаток, что стабильность его характеристик определяется стабильностью параметров объекта, что ограничивает область его применения объектами со стационарными параметрами.
Цель изобретения - повышение ди10намической точности регулятора.
Поставленная цель достигается тем, что в регулятор, содержащий последовательно соединенные первый измеритель рассогласования, управляемый
15 усилитель, объект, выход которого соединен с вторым входом первого измерителя рассогласования, выход которого соединен с блоком выделения модуля, ключ,, выход которого через
20 первый фильтр подключен к управляющему входу управляемого усилителя, введены пороговое устройство и последовательно соединенные второй фильтр и второй измеритель рассогласования,
25 второй вход которого соединен с выходом объекта, а выход - с информационным входом ключа,управляющий вход которого через пороговое устройство соединен с выходом блока выделения
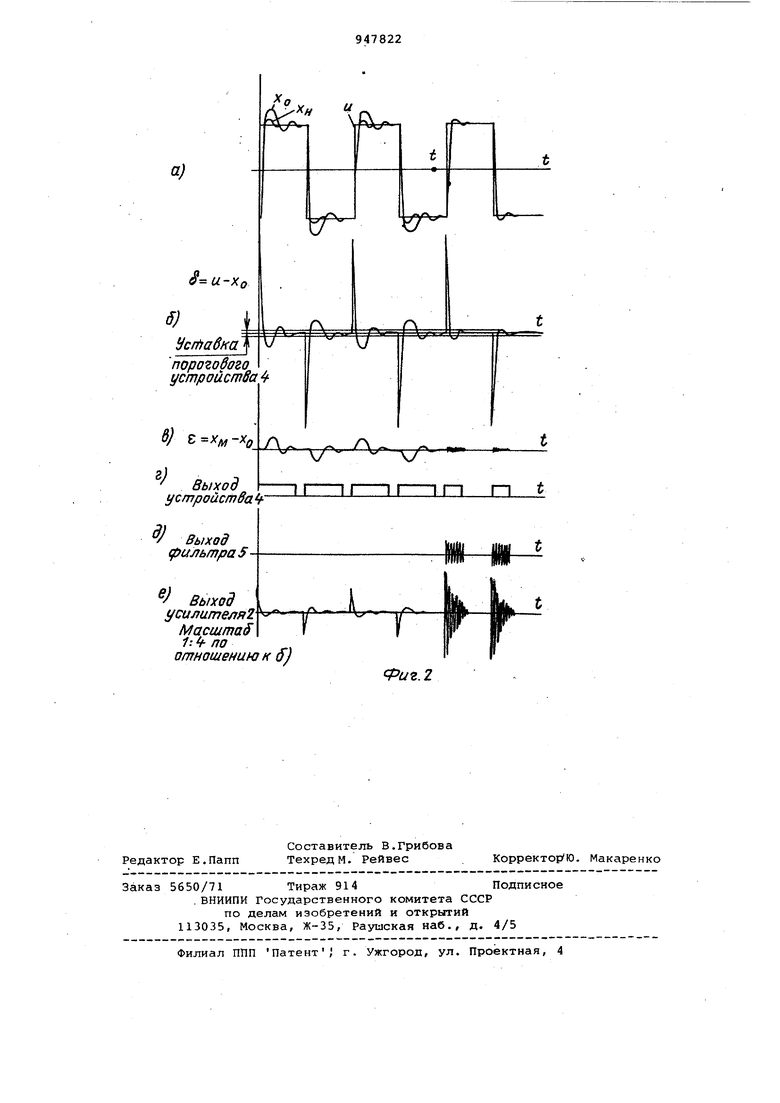
30 модуля. УправляемыР усилитель имеет коэффициент передачи -l-l при отсутствии сигнала на управляющем входе, +К при положительном сигнале на управляющем входе и -К при отрицательном. На фиг. 1 представлена функционгш ная схема регулятора; на фиг. Я временные диаграммы работы системы с регулятором. Регулятор содержит измеритель 1 рассогласования, управляемый усилитель 2, блок 3 выделения модуля, пороговое устройство 5, фильтры 5 и 6, измеритель 7 рассогласования, ключ 8, объект (управления) 9. Регулятор работает следующим образом. При работе системы управления с малыми ошибками (модуль сигнала рассогласования не превышает уставки порогового устройства) ключ 8 разомкнут, коэффициент передачи усилителя равен +1, и система функционирует как обычная система автоматического управления по отклонению. Если модуль сигнала рассогласования превышает величину уставки порогового устройства/ что происходит, если параметры объекта управления (коэффициент передачи, постоянные времени) отличаются от расчетных зна чений, пороговое устройство 4 переводит ключ 8 в состояние Включено Передаточная функция фильтра 6 выбира.ется равной передаточной функции разомкнутой системы при значениях параметров объекта, равных расчетньм (номинальным), т.е. фильтр 6 является моделью динамических характеристик разомкнутой системы. Сигнал на выходе измерителя 7 рассогласования всарактеризует степень отклонения па(Раметров объекта от расчетных. Через ключ 8 этот сигнал подается на фильт 5, параметры которого выбираются таким образом, чтобы обеспечить устойчивость двйжёния объекта 9 относительно модели, т.е. стремление к нулю ошибки Е , Это обеспечивается тем что управляемый усилитель 2 при ошибках одной полярности переводится в режим с большим значением коэффициента передачи +К, при этом на объ ект 9 подается максимальный сигнал управления и приводятся в действие все его энергетические ресурсы для достижения координатой Хо значения В случае превьшзения координатой XQ значения Хмуправляемый усилитель 2 переводится в режим с коэффициентом -К и вновь используются все энергетические ресурсы объекта для торможения с целью достижения значения Х ЕсЛи уравнение фильтра 5 представить в виде л,, OY g (X) С,Х + С +...+ С, -, то условием устойчивости процесса управления будет выражение вычисленное на координатах движения объекта управления. Коэффициенты С .. .С , и значение коэффициента К выбирают таким образом, чтобы выполнялось соотношение (1). В этом случае происходит непрерывное переключение коэффициента усилителя 2 со значения +К на -К и обратно с весьма ВЫСОКОЙ частотой (организуется скользящий режим движения объекта 9 относительно модели). Наличие порогового устройства позволяет удовлетворить двум противоречивым требованиям к работе системы управления: высокая статическая точность при малой интенсивности выходных воздействий (при этом даже при значительных рассогласованиях операторов объекта и модели модуль ошибки рассогласования не превышает величины уставки) и удовлетворительная точность (малое перерегулирование и колебательность, предельное быстродействие) при высокой интенсивности входных врздействиР. В этом режиме динамика объекта с точностью до параметров скользящего режима определяется параметрами фильтра 6 (модели). На фиг. 2 изображены временные диаграммы при отработке системой двухполярного ступенчатого входного воздействия (реверсирование объекта). На диаграмме а показаны сигнал управления и обработки его фильтром 6 Хр (желаемый процесс) и объектом Х, параметры объекта отличны от номинальных и его динамическая ошибка больше допустимой. В мслиент времени t начинает работать регулятор (например, восстанавливается связь между выходом измерителя 7 рассогласования и входом ключа 8). На диаграммах б, в, г, д, е приведены соответственно сигналы ошибки сГ рассогласования , выходного сигнала порогового устройства 4, выхода фильтра 5 и выхода управляемого лсилителя 2. Пороговое устройство 4 срабатывает и замьжает ключ 8 при превышении ошибкой сГ уровня уставки порогового устройства, помеченного на диаграмме б. Выходные сигналы блоков 5 и 2 показаны приблизительно, так как для скользящего режима характерны переключения с весьма высокой (теоретически бесконечной) частотой, на практике определяющейся неучтенньми в ма.тематическом описани 1 малыми инерционностями и неоднозначными нелинейностями типа люфта и гистерезиса. Использование предлагаемого регулятора позволяет noBfcjciiTb динамическую точность работы системы при сохранении уочностных показателей установившихся режимов и расширит область работы объекта управления за счет использования его в условиях, когда его параметры изменяются в зна чительных пределах, например, при применении климатических условий,и менении параметров нагрузки и т.п. Использование подобного регулятора в системах управления гидроприводами позволяет отказаться от систем термостабилизации рабочей жидкости, что может уменьшить стоимость, габариты привода и повысить его надежность . Предлагаемый регулятор может быть включен в любую систему автоматического управления, работающую по принципу отклонения, целесообразно испол зование его в системах управления м таллообрабатывающими станками, особенно с гидравлическим приводом, в системах управления промышленными манипуляторами, динамические характеристики которых определяются массой обрабатываемого груза, а также системах управления летательными ап паратами. В любом случае-возможност работы регулятора в условиях изменени параметров объекта управления являе ся определяющим факторе его исполь эования. Работоспособность предлагаемого регулятора проверена на аналоговой модели, Регулятор обеспечивает стабильность динамических характеристик си темы управления при изменении коэффициента передачи объекта управления на порядок в большую сторону и на порядок в меньшую.. Допустимые пр делы изменения постоянных времени зависят от порядка оператора объека и степени ухода коэффициента пеедачи объекта от номинального знаения. При номинальном значении коффициента изменение постоянных вреени объекта в 2 раза в обе стороны рактически не влияет на характер инамических процессов в системе. Разработка принципальной электрической схемы регулятора находится на этапе технического предложения. Формула изобретения Регулятор, содержащий последовательно соединенные первый измеритель, рассогласования, управляемый усилитель, объект, выход которого соединен с вторым входом первого измерителя рассогласования, выход которого соединен с блоком выделения модуля, ключ, выход которого, через первый фильтр подключен к управляющему входу управляемого усилителя, отличающийся тем, что, с целью повышения динамической точности регулятора, в н€|го введены пороговое устройство и последовательно соединенные второй фильтр и второР измеритель рассогласования, второй вход которого соединен с выходом объекта, а. выхор - с информациониь входом ключа, управляющий вход которого через пороговое устройство соединен с выходом блока выделения модуля. Источники информации, принятые во внимание при экспертизе 1.Авторское свидетельство СССР 225293, кл. G 05 В 13/00, 1967. 2.Авторское свидетельство СССР 9 750428, кл. G 05 В 11/01, 1978 (прототип).
V
Выход устройства г
Выход
П П t


| название | год | авторы | номер документа |
|---|---|---|---|
| САМОНАСТРАИВАЮЩАЯСЯ СИСТЕМА КОМБИНИРОВАННОГО РЕГУЛИРОВАНИЯ | 1989 |
|
RU2022313C1 |
| Нелинейное корректирующее устройство | 1987 |
|
SU1536351A1 |
| Следящая система | 1989 |
|
SU1732329A1 |
| Регулятор | 1978 |
|
SU750428A1 |
| СИСТЕМА ЭЛЕКТРОСНАБЖЕНИЯ | 2012 |
|
RU2513025C2 |
| СПОСОБ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ПАРАМЕТРАМИ ЭЛЕКТРОМЕХАНИЧЕСКОЙ СИСТЕМЫ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2010 |
|
RU2414048C1 |
| Самонастраивающийся регулятор | 1981 |
|
SU960731A1 |
| СПОСОБ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ В СИСТЕМЕ С ЛЮФТОМ И СЛЕДЯЩАЯ СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1999 |
|
RU2154295C1 |
| Самонастраивающаяся система автоматического управления для объектов с запаздыванием | 1981 |
|
SU1173390A1 |
| Регулятор давления жидкости | 1988 |
|
SU1536359A1 |