1
Изобретение относится к сельскохозяйственному машиностроению, а именно к устройствам для автоматизации вождения самоходных машин и может быть использовано при групповом управлении несколькими агрегатами одним трактористом.
Известно устройство для группового вождения тракторных airperaTOB, в котором допустимый диапазон изменения продольного расстояния между агрегатами ограничен раз1мер.ами токонесущего проводника (излучателя) на ведущем агрегате, т. е. не превышает одного-двух метров 1. Этого недостаточно, так как .вследствие хаотического изменения со противления агрегатов и неидентичности их характеристик поддержание продольного расстояния между агрегатами с такой точностью практически невозможно.
Наиболее близким то технической сущности к Предлагаемому Я1вляется индукциоиное устройство для группового вождения тракторных агрегатов, включающее излучатель, две приемные антенны, схему сравнения выходных напряжеиий антенн и исполнительных механизмов рулевого управ ления ведомого агрегата. При отклонении Ведомого агрегата от требуемого положения выходные напряжения приемных антенн изменяются и иа выходе схемы сравнения появляется разность сравниваемых напряжений. Эта разность поступает на вход исполнительного механизма рулевого управления и обеспечивает ловорот ведомого агрегата .в сторону уменьшения величины отклонения. Выходное напряжение схемы сравнения (входное напряжение исполнительного Механизма) пропорционально величине ошибки автовождения ведомого
агрегата и обратно пропорционально пятой степени продольного расстояния между агрегатами;.
Недостатком устройства явл;яется то, что допустимый диапазон изменения продольного расстояния между агрегатами ограничен долями .
Целью изобретения является повышение точности вождения ведомого агрегата путем стабилизации величины зоны нечувствительности при изменении продольного расстояния .между агрегатами.
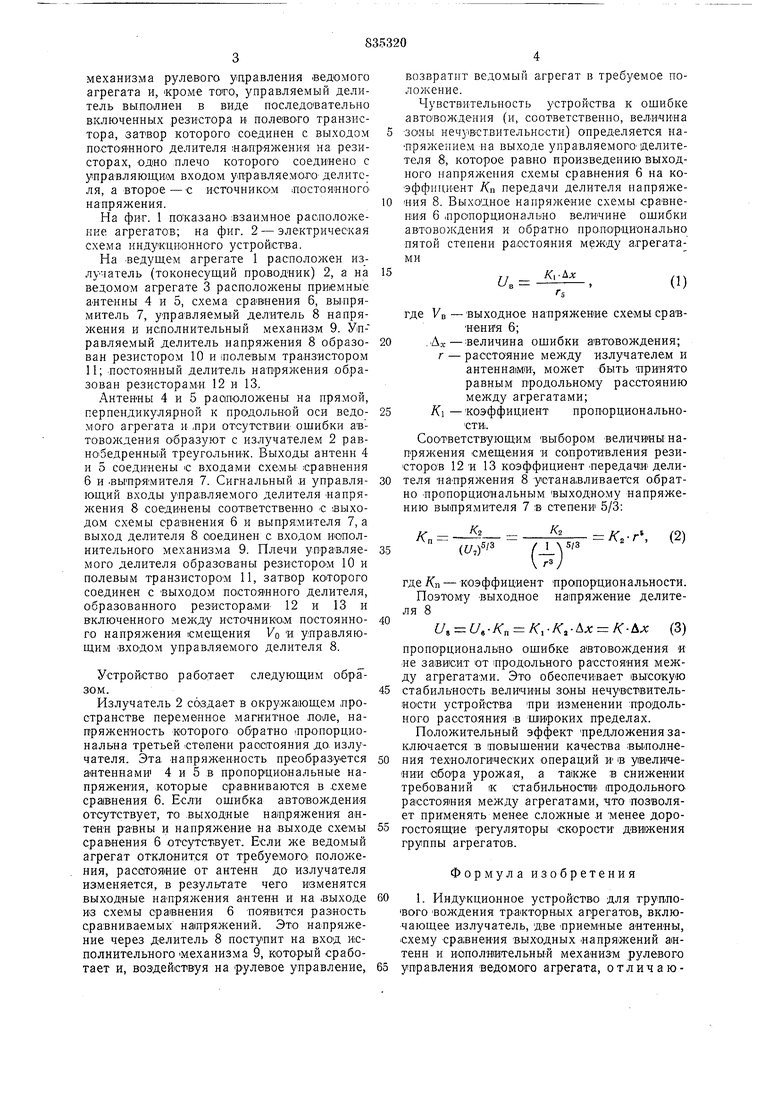
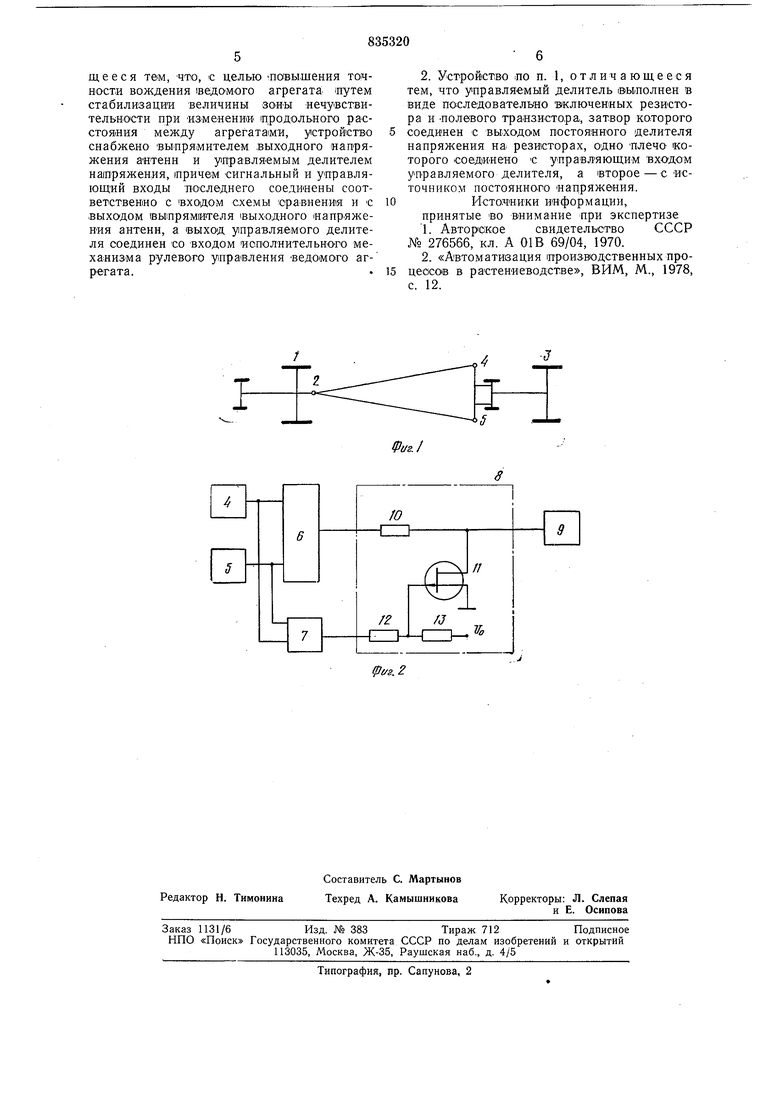
Поставленная цель достигается тем, что устройство снабжено выпрямителем выходного напряжения антенн и управляемым делителем напряжения, причем сигнальный и управляющий входы последнего соединены соответственно с входом схемы сравнения и с выходом выпрямителя выходного напряжения антенн, а выход управляемого делителя соединен с входом исполнительного механизма рулевого уцравлени-я ведомого агрегата и, «роме того, управляемый делитель выполнен в виде последовательно включенных резистора в полевого транзистора, затвор которого соединен с выходом по.стоя«ного делителя :на.прял ения на резисторах, одно плечо которого соединено с управляющи1М входом управляемого делителя, а второе-с источникОМ лостояиного напряжения. На фиг. 1 показано взаимное расположение агрегатов; на фиг. 2 - электрическая схема индукиионного устройства. На ведущем агрегате 1 расположен излучатель (токонесущий проводник) 2, а на ведомом агрегате 3 расположены приемные а«тенны 4 и 5, схема сравнения 6, выпрямитель 7, управляемый делитель 8 напряжения и исполнительный механизм 9. Управляемый делитель напряжения 8 образован резистором 10 и полевым транзистором 11; постоянный делитель наП|рял ения образован резисторами 12 и 13, Антенны 4 и 5 раоположены на прямой, перпендикулярной к прадольвой оси ведомого агрегата и ,при отсутствии ошибки автовождения Образуют с излучателем 2 равнобедренный треугольник. Выходы антенн 4 и 5 соединены ic входами сравнения 6 и .выпрямителя 7. Сигнальный .и управляющий входы управляемого делителя «апряжения 8 соединены соответственно с .выходом схемы сравнения 6 и выпря;мителя 7, а выход делителя 8 соединен с входом иополнительного механизма 9. Плечи управляемого делителя образованы резистором 10 и полевым транзистором 11, затвор которого соединен с выходом постояиного делителя, Образованного резисторами 12 и 13 и включенного между источником постоянного напряжения смещения УО и управляющим входом управляемого делителя 8. Устройство работает следующим . Излучатель 2 создает в окружающем .пространстве переменное магкитное поле, напряженность которого обратно лроиорциональна третьей степени расстояния до излучателя. Эта иапрял енность нреобразуется аитеннами 4 и 5 в пропорциональные напряжения, которые сравниваются в схеме сра|внения 6. Если ощибка автовожденИЯ отсутствует, то выходные на;пряжения аитен-н равны и наирял ение на выходе схемы сравнения 6 отсутствует. Если же ведомый агрегат отклонится от требуемого: положения, расотояние от антенн до излучателя изменяется, в результате чего изменятся выходные напряжения антенн и на выходе из схемы сравнения 6 появится разность сравниваемых напряжений. Это напряжение через делитель 8 поступит на вход исполнительного Механизма 9, который сработает и, воздействуя на рулевое управление, возвратит ведомый агрегат в требуемое положение. Чyвcтв итeльнocть зстройства к ошибке автовождения (и, соответственно, величина зоны нечувствительности) определяется напряжением на выходе управляемого делитетеля 8, которое равно произведеиию выходного напряжения схемы сравнения 6 на коэффициент Кп передачи делителя напряжения 8. Выходное напря кение схемы сравиевия 6 ,пр01порционально величине ощибки автовождения и обр-атно проиорнионально пятой степени расстояния между агрегатамигде VB -выходное напряжение схемы сравнения 6; .АХ-величина ошибки автовождения; г - расстояние между излучателем и антеннами, может быть принято равным продольному расстоянию между агрегатами; Ci -коэффициент пропорциональноСоответствующим выбором величины напряжения смещения и соиротивления резисторов 12 и 13 коэффициентПередачи делителя напряжения 8 устанавливается о.братно Пропорциональным выходному напряжению выпрямителя 7 в степени 5/3: iv- Дг К,-г / 1 N,5/3 Wj где К-л - коэффициент пропорциональности. Поэтому выходное на1пряжение делителя 8 и К,-К - х-К-Ь.х (3) пропорционально ошибке автовождения и ii& зависит от 1продольного расстояния между агрегатами. Это обеспечивает высокую стабильность величины зоны нечувствительности устройства при изменении продольного расстояния в широких пределах. Положительный эффект предложения заключается в повыщении качества выполнения технологических операций и в увеличении обора урожая, а также в снижении требований к стабильности: продольного расстояния между агрегатами, что позволяет применять менее сложные и менее дорогостоящие регуляторы скорости движения группы агрегатов. Формула изобретения 1. Индукционное устройство для группоого Вождения тр а кторных аг;регатов, вклюающее излучатель, две приемные антенны, хему сравнения выходных напряжений аиенн и иополнительный механизм рулевого правления ведомого агрегата, отличающ е е с я тем, , с целью повышения точности вождения ведомого агрегата путем стабилизации величины нечувствительности при «SMeHeHH продольного расстояния между агрегатами, устройство снабжено Бьшрямителем выходного напряжения антенн и управляемым делителем нашряжения, причем сигнальный и управляющий входы последнего соединены соответственно с входом схемы сравиення и С выхо-дом выпрямителя выходного напряжения антенн, а выход управляемого делителя соединен со входом иополнительного механизма рулевого управления ведомого агрегата.
2. Устройство по п. 1, отличающееся тем, что управляемый делитель выполнен в виде последователвно включенных резистора и полевого транзистора, затвор которого соединен с выходом постоянного делителя напряжения на резисторах, одно п-лечо которого соединено с управляющим входом управляемого делителя, а второе-с источником постоянного напряжения. Источники информации,
принятые во внимание при экспертизе 1. Авторское свидетельство СССР № 276566, кл. А 01В 69/04, 1970.
2. «Автоматиеация производственных процеосов в растениеводстве, ВИМ, М., 1978, с. 12.
| название | год | авторы | номер документа |
|---|---|---|---|
| Индукционное устройство для груп-пОВОгО ВОждЕНия шиРОКОзАХВАТНыХТРАКТОРНыХ АгРЕгАТОВ | 1979 |
|
SU829001A1 |
| Устройство для группового вождения тракторных агрегатов | 1979 |
|
SU950211A1 |
| Способ программирования траектории движения сельскохозяйственных агрегатов | 1976 |
|
SU751343A1 |
| Индукционная система дублерного вождения машинно-тракторных агрегатов | 1984 |
|
SU1246911A1 |
| Устройство ориентации для систем группового автоматического вождения машинно-тракторных агрегатов | 1979 |
|
SU1376963A1 |
| Система группового управления самоходными агрегатами | 1982 |
|
SU1061716A2 |
| СПОСОБ АВТОВОЖДЕНИЯ СЕЛЬХОЗАГРЕГАТА | 1991 |
|
RU2025924C1 |
| Устройство для автоматического вождения мобильного агрегата по светоконтрастной программе | 1974 |
|
SU683662A1 |
| Система группового управления самоходными агрегатами | 1978 |
|
SU880284A1 |
| Система для группового вождения самоходных сельскохозяйственных машин | 1984 |
|
SU1197573A1 |
