Изобретение может быть использовано в любой области техники, применяющей еи брационную отделочную обработку.
Известно сепари(рующее устройство, содержащее две, имеющие общую ось вращения, решетки, одна из которых установлена с воз1М1Ожнастью (вращения относительно этой оси, на радиальных звеньях вращающейся рещетки шарнирно закреплены эле.менты, контактирующие с цилиидр-ичеса :ой стевкойконтейера под углом заклинива-. ния, а ось вращения решетож рааположена в -лолзунах, |устано1вленных ,в торцовых стенках контейнера {.
Недостатком устройсива .Я1вляется управление разбитой разделительных рещеток, необходимое после сепарирования деталей, осуществляемое перед загрузкой складыванием рещеток путем ручного поворота общей оси рещеток.
Целью изобретения Я1вляется павыщение производительности вйбромащины путем осуществлевия . автоматического поворота оси крепления рещетак и лапеременного вращения последних относительно оси.
Цель достигается там, что направляющая в верхней части контейнера выполнена криволинейной формы, а кривизна ее выбрана из условия, позволяющего исключать заклинивание рещеток, при этом последние
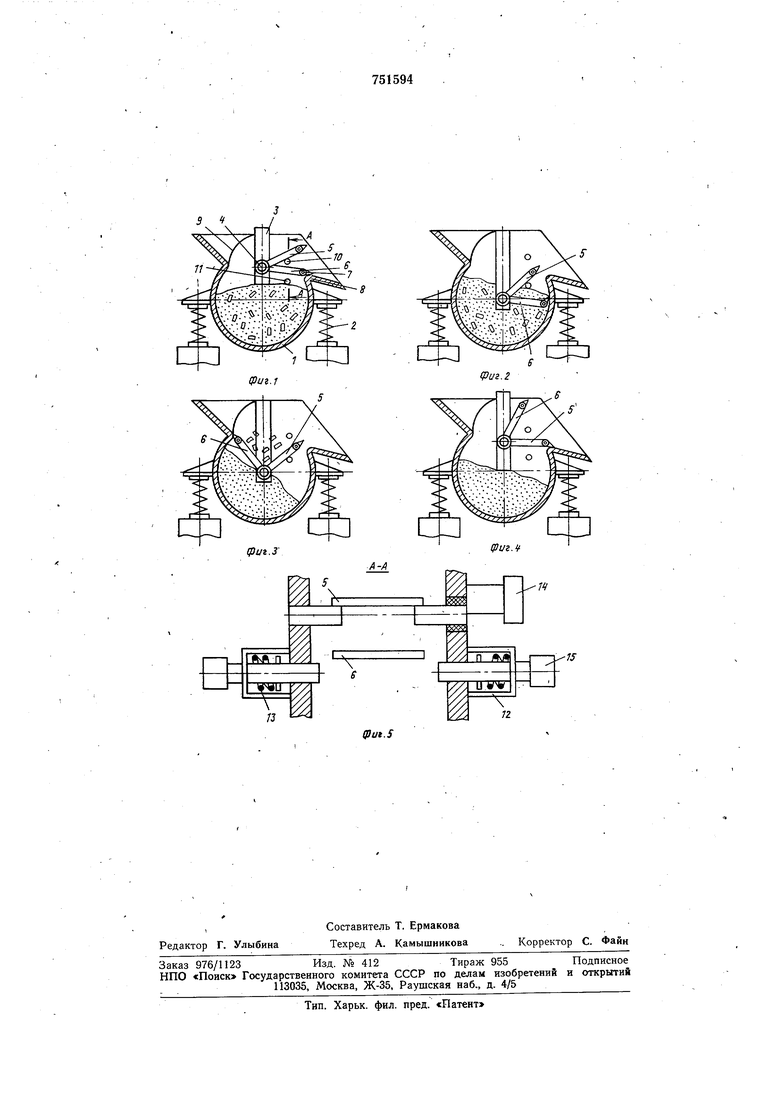
выполнены равными по щирине, а на торцовых стенках контейнера выше , и ниже уравня разгрузочной площадки установлены опоры-штифты, нижшие из которых вы5 полнены с возможностью перемещения посредством электромагнитов, кинематически связанных с .верхними опорами- щтифтами. На фиг. 1-4 показаны рабочие моменты сепарирующего устройства; на фиг. 5 -
10 разрез Л-А на фиг. 1.
Сепарирующее устройство установлено на цилиндрическом контейнере 1, подвешенном на упругих элементах 2 и приводимом в колебательные движения от ввброприво15 да (не показан). В торцовы-х стенках, ползунах 5 смонтирована ось 4, на котарой щарнирно закреплены рещетки 5 и 6, рав-. ньге по щирине. На свободных концах рещеток5 и 6, например посредс-гоом. резино20 металлических щарниров, укреплены собачки 7.
В верхней части, вне цилиндра, расположены разгрузочная площадка 8 и криволинейная направляющая 9. Выше уровня
25 разгрузочной площадки 8, на торцавых стенках, закреплены опоры-штифты 10, а ниже уровня - подвижные апоры-|щтифты 11, которые установлены в кронштейнах 12 и под действием усилия от пружин 13 выдви30 «уты внутрь контейнера. Одна з опорштифтов 10 изолирована от контейнера и соединена с реле 7.4, второй конец .которого соединен с «онтейнером.
Для раздвиж-ен-ия опор-штифтов 11 уста«овлены злвктро:магниты .15, управляемые замжканиём и размыжаниём реле 14. ,Села1рИ|р(уюш,ее устройство ра1ботае,т слеД1уюш,и:м образом.
iBio йремя 1вй5р0рбра1бо11к« деталей сепарирующее-устройство находится вне зоны циркулящии деталей и наполнителя (фиг. 1). В это время решетка 5 находится, на опорах-штифтах ,10, а решетка 6 о.пи(рается на раЗПруз04ну оплощадку 8. Замыкание цеди реле 14 три контакте решетжи 5 с опорамиштифтами 10 включает электромагниты 15, которые выводят опоры-штифты 11 из кон.тейнера н освобождают пространство для воамюжности движения решети 6. После окончания процесса виброоб(работ1ки ползуны 3 получают перемещение вниз до савмеш:енйя оси решеток 4 -с ось19 цилиндра контейнера. В этот момент (фи1Г. 2) решетка 6 входит в контакт с цилиндрической частью контейнера, а решет1ка 5 соскальзывает с опор-штифтов 10, размыкает адепь реле 14; выключает электромагниты 15 и под действием усилия пружин 13 опоры-штифты 11 вводятся в контейнер, на фиксируется решетка 5. Собачки 7 решетки 6, входяш.ие в iKOHTajKT с, .цилиндрич-еокой стенкой контейнера под углом заклинивания, опо-собствуют вращению решепки б до положения, показанного на фиг. 3. При вращении решет1ки 6 по цилиндрической контейнера I детали остаются на решетке 6, а наполнитель просеивается звеньями решет1ки и остается в контейнере. После фиксирования собачек, 7 при выходе из цилиндрической части контейнера, ползуны 3 .получают движение вверх, перемещая решетку 6 по натравляющей 9, имеющей кривизну, в любой точке которой угол между пе;ремещающейся решеткой и нормалью к этой точке касания равен углу трения в направлении движения. Детали, лаходясь на ви1брирующих решетках 5 п 6, окончательно отделяются от наполнителя, и транспортируются по разгрузочной площадке 8 в тару. В последний момент касания перемещающ йся решет1ки 6 через юабачки 7 с криволинейной направляющей 9 (фиг. 4), под действием вилы тяжести решетка 6 падает на опоры-штифты 10, замыкает цепь реле 14 и иключает электромагниты 15 (фиг. 5). Детали для обрабовки за.пружаются вновь, и цикл повторяется, но сепарирование происходит при в|ращении решетки 5.
Наличие кривизны на .направляющих, в любой точке «отарой угол между подвижной :решеткой и «ормалью IK этой точке каса-ния равен углу т рения е направлении движения, позволяет исключить заклинивание в случае, когда величина у1гла равна нулю
или отрицательна, а в случае, когда величи-на угла больше угла трения, возможно проскальзывание назад, что также может шривести к заклиниванию. Величина угла, равного углу трения, позволяет равномерно осуществлять паремещение собачки 7 по направляющей 9 и зависит от физико-механических свойств контактируемых материалов. Для пары сталь сталь угол .трения равен р arctg/ 8,5°.
Наличие в верхней части контейнера криволинейной паправляющей и создание воаможности поперечного вращения рещеток позволяют осуществить автоматизацию процесса сепарирования обработанных деталей от наполнителя в вибрационной мащине с цилиндрическим контейнером. А создание угла между решетками при выгрузке деталей, меньщего 180°, способствует сокращению времени разгрузки,- что достигается перемещением вверх полз1унов с большей скоростью.
Кроме того, падение решетки на опорыштифты исключает время, необходимое на осуществление ручного поворота оси крепления решеток, что повьгщает производительность вибрационной машины.
Формула и 3 о i6 р е т е н и яil. Сепарирующее устройство к вибромашине, содержащее установленные в тЬр1ЦОВЫХ стенках контейнера ползуны, в которых рааположена общая ось вращения двух решеток, имеющих на радиальных звеньях элементы, шарнирпо зажрвпленпые с возможностью контакт1И1рования под углом заклинивания с .цилиндричеокой стенкой контейнера, а отри перемещении ползуна - с направляющей в верхней части контейнера, отличаюшееся, тем, что, с целью повыш.ения произвОсДительностАИ вибром.ашины путем возможности осуществления автоматического поворота оси крепления решеток, направляющая в верхней части контейнера х выполнена криволинейной формы, а кривизна ее выбрана из условия, поз1воляющего исключить заклинивание решеток.
2. Усрройство поп. 1, отличающеес я тем, что, с пелью возможности осуществления, попеременного вращения решеток относительно оси, последние выполнены равными по ширине, а на тортовых стещах контейнера выше и ниже уровня разгрузоч, ной площадки установлены опоры-штифты, нижние из которых выполнены с возможностью перемещения посредством электромагнитов, кинематически связанныхс верхними опорами-штифтами.
ИЬточник информации, пр нятый во внимание при Э1кспертизе:
1. Авторское сзв Нйетелвство СССР № 468768, 1КЛ. В 24 В 31/06, 1973.
w
фиг.З
| название | год | авторы | номер документа |
|---|---|---|---|
| Сепарирующее устройство к вибромашине | 1974 |
|
SU542630A2 |
| Вибрационная машина | 1978 |
|
SU804388A1 |
| Сепарирующее устройство к вибромашине | 1973 |
|
SU468768A1 |
| СПОСОБ ПРОИЗВОДСТВА, ХРАНЕНИЯ И ПОДГОТОВКИ К РЕАЛИЗАЦИИ СЛИВОЧНОГО МАСЛА И СПОСОБ ХРАНЕНИЯ И ПОДГОТОВКИ К РЕАЛИЗАЦИИ СЛИВОЧНОГО МАСЛА | 1996 |
|
RU2071260C1 |
| ЗЕРНОУБОРОЧНЫЙ КОМБАЙН (ВАРИАНТЫ) | 2002 |
|
RU2287925C2 |
| ВИБРАЦИОННЫЙ СТАНОК | 1991 |
|
RU2014204C1 |
| Установка для вибрационной обработки деталей | 1976 |
|
SU575209A2 |
| Самоходный картофелеуборочный комбайн | 1989 |
|
SU1780618A1 |
| Способ сборки трубчатых секций теплообменников и установка для его осуществления | 1982 |
|
SU1098741A1 |
| ФИЛЬТР РУКАВНЫЙ ДЛЯ ТРЕХСТУПЕНЧАТОЙ ОЧИСТКИ ВОЗДУХА ОТ МЕХАНИЧЕСКИХ ПРИМЕСЕЙ | 2002 |
|
RU2202401C1 |