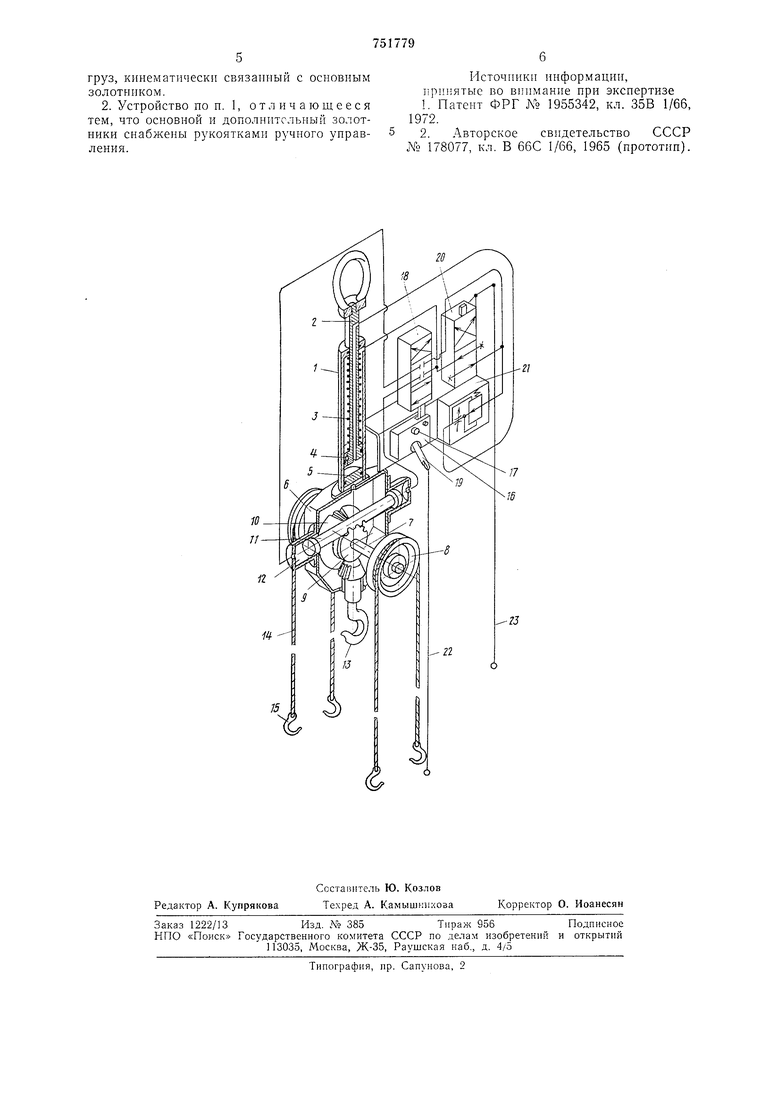
подвода жидкости. Во BiiGiiiTOKOcoii полости гидроцнлиндра размеитеп плавающий поршень 5. Цнлиидр CBOci; гпльзо жестко сосдннеп с корпусом 6, па котором посредством осп 7 закреплены два барабапа 8. На осп 7 закреплены также цнлпндрпческая 9 п коническая 10 шестерпп. Первая соедипепа с рейкой 11, связаппой с гпдродплппдром 12, а вторая - с коппческой шестерпей крюка 13. На барабапах навиты и ередией точкой жестко соедппепы с ппмп тросы 14, па концах которых закреплены захватные органы 15. К корпусу 6 с возможпостью качапия в плоскости барабана 8 нрикреплеп балапсирпый груз 16 па осп 17. К liewy прикреплен своим к лачком трехиозпциоппый четырехходовой золотник 18. В среднем положепии балапснрный груз фиксируется фиксатором 19, здесь же закреплепы дополпптельпый реверсивны золотппк 20 и регулятор 21 скоростп. Ручками 22 п 23 золотппками 18 п 20 можно управлять вручиую.
Работает устройство в иескольких режимах.
В исходном ноложеппи пружииа 3 преодолевает вес устройства и другие соиротивлеиия п втягивает шток 2 впутрь гидроцилиидра 1. При этом жидкость, находящаяся во виештоковой иолостп, через клапаи 4 иеретекает в штоковую полость, а оставшийся объем между двумя служит для комиеисапии утечек. При этом первый золотник 18 стоит в дентра.аьпом положеиии, п фиксатор 19 груза 16 зак)ыт. Второй золотн1п 20 CTOiiT i; одиога из крайиих положеппй.
В режиме выравпивапия груза его зацепляют оргаиамп 15 и прпподгп-1мают. Ee;ni груз имеет пееимметрпчио расположеппый цептр тяжестп, то груз п устройство запимают иаклониое положение. За ручку 22 оттягивают фпксатор 19, и груз 16 поворачивается вокруг оси 17, включая золотник в ту или ииую сторону, в зависимости от углаиаклоиа груза. При этом жидкость в штоковой полости, сжатая весом груза, пройти через клапан 4 в полость между верхппмп поршпямн не может. При срабатывании золотппка 18 оиа иаправляетея в гпдроцилппдр 12 и поступает через золотппк 18 в регулятор 21 скоростп и далее по сверлеппю в штоке 2 - в полость над порнп-тем 5. Поскольку при перемеи1епии штока 2 объем иод его поршием освобождается больший, чем вытеспяется из штоковой полостп, то иоршеиь 5, перемещаяеь за верхппм поршнем, компепсирует разницу этих объемов. Рейка 11, перемещаясь поршием гндроцилиидра 12, через цилппдрпческую шеетерпю 9 поворачивает ось 7 с барабанами 8 п шестерней 10, а пос.тедпяя через вторую коническую шеетерию поворачивает крюк 13. Это движение продолжается до тех пор, пока груз ие выравияетея за счет измеиеппя длииы концов троса 14. одии из которых при враИ1,еиии барабапа 8 пакручнвается иа пего, а другой с.чатывается. Устройство займет вертикальное ноложсннс, п груз 16 своим фиксатором 59 фиксируется к среднем по.iOiveinHi.
В режиме каитоваг.) груза все эле.меиты уетройет1за работают так же, как опиеаио .Bbinie, с той разиицей, что, вьи1ув фиксатор 19 груза 16 за ручку 22, ею же оттягивают
балансир, а с ппм i; кулачок золотиика 18 в стороиу же.лаемог() каптова1П1я и удерживают в таком положенпи до пеобходимого угла кантования груза, иоеле чего ручку 22 отиуекают, и золотиик 18 уетаиавливается
в иейтральиое иоложенне. При этом прекраИ1,ается движение рейки 11 и других элеMeirroB.
В режиме механического поворота вокруг вертикальной оси груз иодвенпшают к крюку 13 и ручкой 22 унрав. его новоротом в желаемую сторону. Прн этом все элементы работают в еоот)зетствпп с вышеописаииой схемой, и крюк 13 е грузом поворачивается шестерней 10, а барабаны 8 при этом
ирокручпваются вхолостую.
В режиме плавпого оиуекаппя груз может быть подвео1ен к крюку 13 или за хвачеи захватными органаь:и 15. Плавпым опускаиием управляют при номоидп ручки 23. При
этом золот1;ик 20 иереводится во второе крайиее иоложеиие и еоедгп1яет поеледоватс,;П)ИО по:)оеть одпоеторопиего пилиндра с eiO ппжией иолостью через регулятор 21 скороетн.
Ф о р ;, у л а и 3 о б р е т е и и я
1. Грузозахватиое уетройетво, еодержапдее корпус, соеднненпук) с корпусом посредством несущего гндродилппдра е подирулсипеиным иорщнем проушипу для навешиваПИЯ иа крюк крана, установленные на корпуее захватные органы и мехаиизм выравииваиия ноложеии ; , включающий ирнводпой гидравлический цилиидр и уиравляюп,нй золотник, отличающееся
тем, что, с целью расширения функций уетройетва путем обееиечения с его помощью ироцессов каитоваппя, поворота груза и его .иого опускаиия, i:a корпусе уетановлеиы два барабаиа с тросами, иа которых закреилеиы захватиые оргаиы, зубчато-реечный меха)1изм, связываюишй барабапы с нрнвод.ным гидроцплнндрсм, и цеитральпый крюк, соедпнеииый зубчатой передачей с приводным гидроцилиидром, иричем уетройство сиабжеио донолиительиым управляюии1м золотником н регулятором скорости, соедииеииыми трубопроводамп между собой и несущим гндроцилиидром, доиолиительио оборудоваииым плаваюпиш поршием, а на корпзсе устаиовлен балансириый
груз, кинематически связаиныи с основным золотником.
2. Устройство по и. 1, отличающееся тем, что основной и дополнительный золотники снабжены рукоятками ручного управления.
Источники информации, Г ринятые во внимание при экспертизе 1. Патент ФРГ К° 1955342, кл. 35В 1/66, 1972.
2. Авторское свидетельство СССР № 178077, кл. В 66С 1/66, 1965 (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| ГИДРОПРИВОД ЛББПДКИ | 1971 |
|
SU310864A1 |
| Автоматический регулятор производительности насоса | 1978 |
|
SU731052A1 |
| Гидропривод погрузчика | 1973 |
|
SU501042A1 |
| Гидравлический привод вывешивания и горизонтирования грузовой платформы | 1978 |
|
SU731088A2 |
| Вальцешлифовальный станок для обработки валков в собственных подшипниках | 1975 |
|
SU556029A1 |
| ГИДРАВЛИЧЕСКАЯ СИСТЕМА УПРАВЛЕНИЯ НАВЕСНЫМИ ОРУДИЯМИ СЕЛЬСКОХОЗЯЙСТВЕННОГО ТРАКТОРА | 1970 |
|
SU280074A1 |
| Гидросистема для управляемого перемещения станочных узлов | 1974 |
|
SU559808A1 |
| УСТРОЙСТВО для УПРАВЛЕНИЯ РАБОЧИМ ОБОРУДОВАНИЕМ ОДНОКОВШОВОГО ЭКСКАВАТОРА | 1968 |
|
SU219457A1 |
| УСТРОЙСТВО для БЕЗУДАРНОЙ ПЕРЕДАЧИ ГРУЗОВ В УСЛОВИЯХ КАЧКИ | 1973 |
|
SU408852A1 |
| УСТРОЙСТВО для ПРОЧИСТКИ ФУРМ КОНВЕРТЕРОВ | 1973 |
|
SU392131A1 |
