1
Изобретение относится к судостроению.
Известны устройства для безударной передачи грузов в условиях качки, содержащие связанную с налубой принимающего судна следящую лебедку, взаимодействующую с управляющим механизмом, который в свою очередь связан с гидравлическим двигателем следящего привода грузовой системы.
Одиако в таких устройствах привод следящей системы иедостаточно точен в работе, в результате чего нередаваемый груз отстает от слежения за палубой припмлипощего судна. Кроме того, при введении груза з режим слежения возникают резкие ударные нагрузки, воздействующие на следящий привод.
Целью изобретеиня является иовыщеиие иадежиости устройства путем уменыиения иогрещности следящего нр1.вода, а также обеспечение нлавиого введения груза в режим слежения за налубой принимающего судна.
Достигается это тем, что управляющий механизм вынолнеи в виде взаимосвязаиных между собой управляющего золотннка, гидравлического усилителя и распределительного золотиика, при этом HITOK управляющего золотника посредством лгехаинческой передачи связан со следяней лебедкой н HITOKOM распределительного золотника, корпус которого посредством другой механическо передачи
связан со щтоком гидравлического усилителя, а корпус управляющего золотпика жестко соединен с корпусолЕ гидравлического усилителя и посредством соответствуюн1ей механической
нередачи связан с гидравлическим двигателем следящего привода. Кроме того, механическая передача, связывающая следян1.ую лебедку и П1ТОК управляющего золотника, содержит двуплечий рычаг с передвижной осью качания.
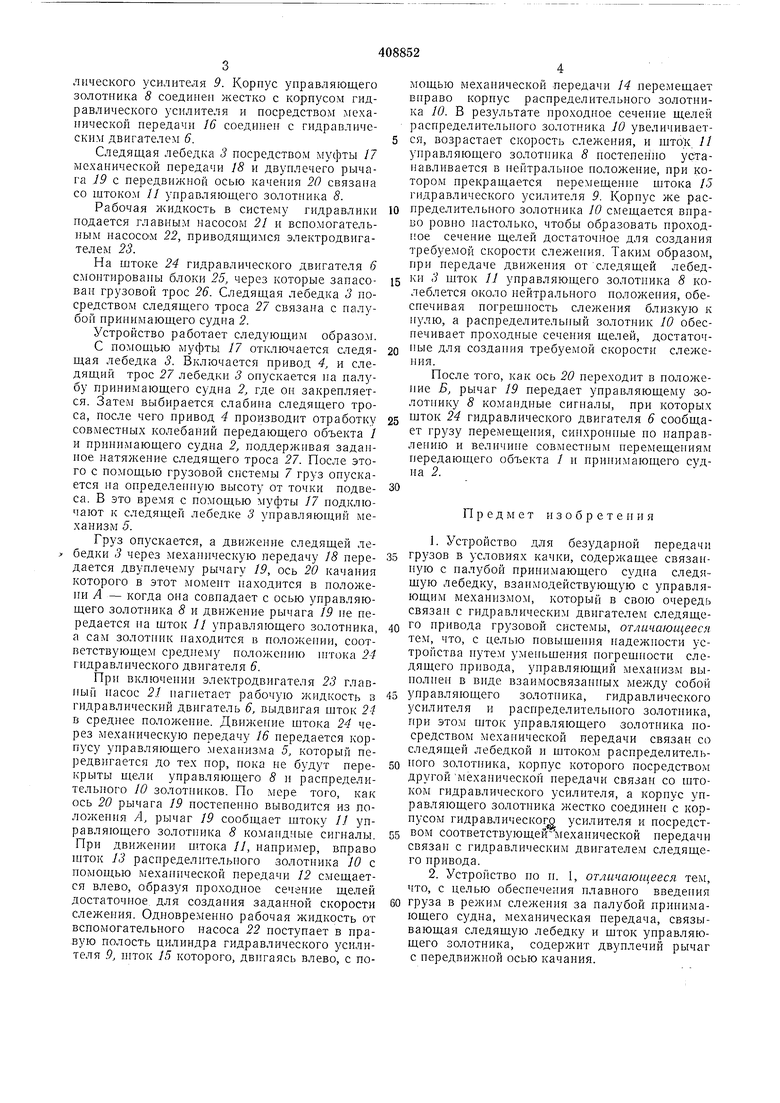
На фиг. 1 схематично нзображено нредлагае.мое устройство для безударной нередачи
грузов в условнях качки, обищн внд; на фиг.
2 - гндромеханическая система устройства.
Устройство для безударной передачн грузов в условиях качкн с передающего объекта / па палубу прннн аюн1,его судна 2 содержит следящую лебедку 3 с приводом 4, взаимодействуюн1.ую с управляющим механизмом 5, который связан с гидравлическим двнГдтеле.м 6 следящего привода грузовой системы 7.
Управляющий механизм выполнен в виде взаимосвязаных между собой управляющего золотннка 8, гидравлического усилителя 9 и
распределительного золотника 10. Прн этом щток И унравляющего золотника 5 посредством механической передачи 72 связаи со HITOком 13 распределительного золотника 10, корпус которого посредством другой мехапической нередачи 14 связан со щтоком ./5 гидравлнческого усилителя 9. Корпус управляющего золотпика 8 соединеп жестко с корпусом гидравлического усилителя и посредством мехапической передачи 16 соединен с гидравлическим двигателем 6. Следящая лебедка 3 посредством муфты 17 механической иередачи }8 и двуплечего рычага J9 с персдвижиой осью качения 20 связана со штоком /У управляющего золотника 8. Рабочая жидкость в систему гидравлики подается главным насосом 21 и вспомогательным иасосо 22, приводящимся электродвигателем 23. На щтоке 24 гидравлического двигателя 6 смонтированы блоки 25, через которые заиасован грузовой трос 26. Следящая лебедка 3 посредством следящего троса 27 связана с палубой принимающего судна 2. Устройство работает следующим образом. С номощью муфты 17 отключается следящая лебедка 3. Включается привод 4, и следящий трос 27 лебедки 3 опускается на палубу принимающего судна 2, где он закрепляется. Затем выбирается слабина следящего троса, после чего привод 4 производит отработку совместных колебаний передающего объекта / и прииимающего судна 2, иоддержнвая заданное натяжение следящего троса 27. После этого с помощью грузовой системы 7 груз опускается на определепную высоту от точки подвеса. В это время с помощью муфты 17 подключают к следящей лебедке 3 управляющий механизм 5. Груз опускается, а движение следящей ле бедки 3 через механическую передачу 18 передается двуплечему рычагу 19, ось 20 качания которого в этот момент находится в ноложеии А - когда она совпадает с осью управляющего золотника 8 и движение рычага 19 не передается на щток // управляющего золотника, а сам золотник находится в положении, соответствующем среднему положению иггока 24 гидравлического двигателя 6. При включении электродвигателя 23 главный насос 21 нагнетает рабочую жидкость з гидравлический двигатель 6, выдвигая щток 24 в среднее положение. Движение щтока 24 через механическую передачу 16 нередается корпусу унравляющего .механизма 5, который передвигается до тех пор, пока не будут перекрыты щели управляющего 8 и распределительного 10 золотников. По мере того, как ось 20 рычага 19 постепенно выводится из положения /1, рычаг 19 сообщает илтоку 1J управляющего золотиика 8 ко.мандные сигналы. При движении щтока 11, например, вправо щток 13 распределительного золотника 10 с помощью мехапической передачи 12 смещается влево, образуя проходиое сечение щелей достаточное, для создания заданной скорости слежения. Одновременно рабочая жидкость от вспомогательного насоса 22 поступает в правую полость пилиидра гидравлического усилителя Я нгток 15 которого, двигаясь влево, с поощью механической передачи 14 перемещает право корпус распределительного золотииа 10. В результате проходиое сечеиие щелей аспределительного золотника JO увеличиваетя, возрастает скорость слежения, и щтоК // правляющего золотиика 8 постепенно устанавливается в нейтральное положение, при котором прекращается перемещение штока 15 гидравлического усилителя 9. Кориус же расиределительного золотника 10 смещается вправо ровно настолько, чтобы образовать проходиое сечение щелей достаточное для создания требуемой скорости слежения. Такил образом, прн передаче движения от следящей лебедки ,3 щток 11 управляющего золотника 8 колеблется около нейтрального ноложения, обеспечивая погрешность слежения близкую к нулю, а распределителы1ый золотник 10 обеспечивает проходные сечения щелей, достаточиые для создаиня требуемой скорости слежения. После того, как ось 20 переходит в положение Б, рычаг 19 передает управляющему золотнику 8 командиые сигиалы, при которых шток 24 гидравлического двигателя 6 сообщает грузу перемещения, синхронные по паправлению и величине совместным перемещениям передающего объекта / и принимающего судна 2. Предмет изобретения 1.Устройство для безударной передачи грузов в условиях качки, содержащее связанную с палубой принимающего судна следящую лебедку, взаимодействующую с управляющим механизмом, который в свою очередь связан с гидравлическим двигателем следящего привода грузовой системы, отличающееся тем, что, с целью повыщеиия надежности устройства путем уменьшения ногрещиости следящего привода, унравляющий механизм вынолнеп в виде взаимосвязанных между собой управляющего золотпика, гидравлического усилителя и распределительного золотника, при этом шток управляющего золотника носредством механической передачи связан со следящей лебедкой и штоком расиределительпого золотиика, корпус которого посредством другоймеханической иередачи связан со штоком гидравлического усилителя, а корпус управляющего золотиика жестко соединен с корпусом гидравлического усилителя и посредством соответствующей механической передачи связаи с гидравлическим двигателем следящего привода. 2.Устройство ио п. 1, отличающееся тем, что, с целью обеспечения плавпого введения груза в режим слежения за палубой принимающего судна, механическая передача, связывающая следящую лебедку и шток управляющего золотника, содержит двуплечий рычаг с передвижной осью качания.
27 JU J /
| название | год | авторы | номер документа |
|---|---|---|---|
| ГРУЗОПОДЪЕЛ1НЫЙ КРАН | 1973 |
|
SU380523A1 |
| СЛЕДЯЩЕЕ УСТРОЙСТВО К СТРЕЛОВЫМ КРАНАМ | 1965 |
|
SU171752A1 |
| СЛЕДЯЩЕЕ УСТРОЙСТВО к СУДОВЫМ КРАНАМДля | 1969 |
|
SU247814A1 |
| ШЛЮПБАЛКА ДЛЯ СПУСКА И ПОДЪЕМА КАТЕРОВИ ШЛЮПОК | 1972 |
|
SU348425A1 |
| Система для безударной передачи груза с судна на судно в условиях волнения моря | 1982 |
|
SU1030249A1 |
| Система передачи груза с судна на судно | 1980 |
|
SU935372A1 |
| СУДОВОЙ КРАН ДЛЯ БЕЗУДАРНОЙ ПЕРЕГРУЗКИ ГРУЗОВ НРИ КАЧКЕ | 1971 |
|
SU417340A1 |
| Судовое грузовое устройство для безударной передачи грузов | 1980 |
|
SU933541A1 |
| ГРУЗОПОДЪЕМНЫЙ КРАН | 1969 |
|
SU238362A1 |
| УСТРОЙСТВО ДЛЯ БЕЗУДАРНОЙ ПОГРУЗКИ ГРУЗА НА ПАЛУБУ СУДНА ПРИ ВОЛНЕНИИ МОРЯ | 1973 |
|
SU368111A1 |


