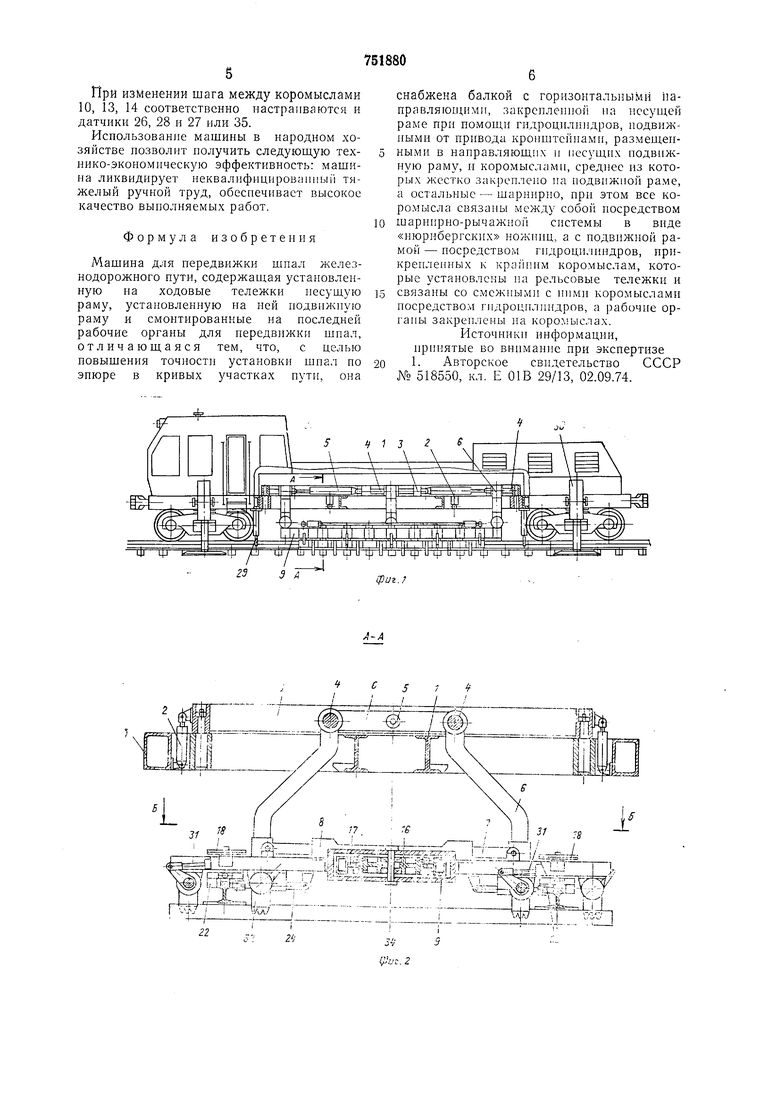
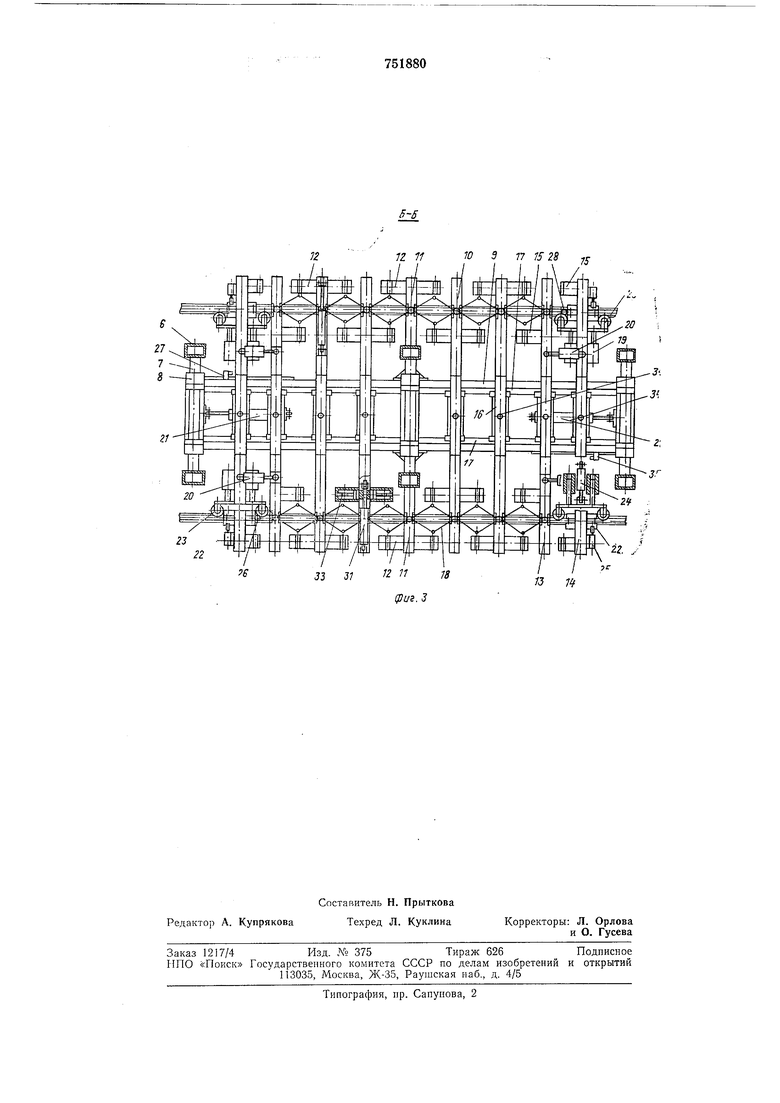
i - . 3. в которой посредством гидроцилиыдров 2 прикреплена балка 3, имеющая горнзоитальыые паправляюпдие 4, па которых с возможностью продолы101о иерсмеиденым от привода, вы1юлис;июго в виде гидравлических цп.тиидров 5, прпкреилеиив1х к балке 3, устаиовлеив кроиштейив 6. На кронштейнах 6 посредством поперсчнв1х пааравляющпх 7 и подшипников 8 скольжеппя устаповлеиа подвижная рама 9. Рама 9 спабжепа коромвюлами 10 и средним коромвюлом И, к концам которых ирикреилекв двустороппие рабочие органы 12. На концах рамы 9 устаповлепв коромысла 13 и 14, на которых закрсплспв односторошп-ш рабочие органы 15. Причем среднее коромысло 11 жестко закреплено на рамс 9, а коромысла 10, 13, 14 - шарнирно п установлены на тележках 16, иеремещаюпднхея в горнзопталвпых направляюш,пх 17 раMBI 9. Коромв1сла 10, 11, 13 соединепы между собой шарнирно-рычажиой системой 18 типа «нюрнбергских ножниц, а крайние коромвюла 14 евязаны с релвеовв1ми тележками 19 и соедппенв со смежными с ними коромыслами 13 посредством гидравлических цилипдров 20. В свою очередв коромысла 13 соедппены е рамой 9 при помоитн гндроцилипдров 21, что обеспечивает нсремеш,еппе всей системы вдолв рамы 9 отпоеителвпо центральиого коромысла 11. Рельеовые тележки 19 оборудоваиы клиповыми зажимами 22 и боковвьми роликоBBIMH оиорамп 23. Машина для передвижки шпал работает следуюш,пм образом. Вначале опускается балка 3 при помонди гидроцилиидров 2 до еоирикосповения с рамой 1. Вместе е рамой 3 опускаются в рабочее положение все рабочие оргаиы, расположенпые на иодвижпой раме 9. Затем выдвигаются боковые роликовые опоры 23 при помош,п гидроцилиидров 24, едвигаюш,ие в средпее положение подвижпую раму 9, поеле этого клиповвю зажимы 22 поворачиваются прп помоши гидроцилипдра 25 и охватывают головку релвсов, но ие зажимают ее. Работа машипы пачииаетея от етвша между рельсами в начале ремонтируемого участка пути. При движении машины вперед оператор включает задний датчик 26 поиска стыка и задний датчик 27 отсчета шпал. Машина паезжает па обрабатвшаемый участок путп и автоматически остаиавливается, как толвко срабатывает датчик 26 и автоматически включается датчик 28 поиска стыка. Затемсрабатвшают устаповленпые на раме 1 машины клепхеввге рельсовые захваты 29, и опускаются на путь опорные домкраты 30, снимая полностью давление на балласт пути от редьсошнальной решетки и машины: Затем зажимаются рельсы клиповыми зажимами 22, и поворачива7U ются в рабочее положение при помощи гиД роцилиндров 31 рабочие органы 12 и 15. Прн этом шпальпые уноры 32 заходят в шпальные япи1ки и под дс 1ствием гидроцилиндров 33 воздействуют с двух сторои в четырех точках иа каждую шпалу, иеремеш,ая ее до устаповки в заданное положение но эпюре. Расстановка шпал осуществляется без предварительной разметки их положеппя, поскольку расстояние между шпалами обеспечивается за счет размещения коромысел 10, 11, 13, 14 и шпальных упоров 32 и их положения на данном участке пути. При выдвижении роликовых опор 23 коромысла 14, поворачиваясь вокруг своей оси 34, устанавливаются по радиусу кривой оси данного участка пути и поворачивают связанные с ними с помощью гидроцилиндров 20 иа такой же угол коромысла 13, связанные шарнирио-рычажной системой 18 с коромыслами 10, поворачивающимися вокруг осей 34 отиоснтелыю центрального коромысла И. Таким образом обеспечивается ориентация рабочих органов 12 и 15 на любом участке железнодорожного пути и устаповка шпал согласпо эпюре путн. После устаповки шпал отжимаются упоры 32 и поворачиваются в верхнее положение. Затем клииовые зажимы 22 и захваты 29 освобождают рельсы, и поднимаются домкраты 30. Машина растормаживаетея и перемещается иа рабочей скорости па следующую позицию, а в это время датчик 27 отсчитывает обработаниые шпалы и останавливает машину так, что коромысло 13 оказывается на расстоянии шага эпюры от ближней обработанной шкалы. Цикл работы машины повторяется до тех пор, пока передний датчик 28 поиска стыка не обнаружит следующий стык. Мащина останавливается, и коромысло 13 оказывается над стыковой шпалой. В этом случае обрабатывается стыковая и промежуточная щпалы одновременно. Закончив цикл, машина перемещается вперед, нока датчик 26 не обнаружит тот же стык, и процесс повторяется па следующем звене. Машина может также работать и при движении назад. В этом случае вместо датчика 27 включается в работу датчик 35. Мащина может расстанавливать также и отдельные щпалы. Установка рабочих органов 12 и 15 на определенную эпюру осуществляется гидроцилиндрами 20 и 21. При изменении расстояния между промежуточпыми щналами оператор гидроцилиндрами 21 перемещает коромысла 13 и связанные с ними щариирно-рычажной связью коромысла 10 относительно коромысла И на необходимую величину. При изменении расстояния между стыковыми щпалами оператор с помощью гидроцилиндров 20 перемещает коромысло 14 на необходимую величину относительно коромысла 13.
При изменении шага между коромыслами 10, 13, 14 соответственно настраиваются и датчики 26, 28 и 27 или 35.
Использование машины в народном хозяйстве иозволит получить следующую техпико-экоиомическую эффективность: машииа ликвидирует неквалифицированный тяжелый ручной труд, обеспечивает высокое качество выполняемых работ.
Формула изобретения
Машина для передвижки шпал железнодорожного пути, содержапдая установленную на ходовые тележки иесущую раму, установленную па ней подвижную раму и смонтированные на последней рабочие органы для нередвнжки шпал, отличаюш;аяся тем, что, с целью новышеиия точности установки шпал но энюре в кривых участках пути, она
снабжена балкой с горизоитальными Иаправляюи1.ими, закрепленной па несуп1,ей раме нри номош,и гидроцилиндров, подвижными от нрнвода кронштейнами, размешепными в направляющих п несущих подв11Л пую раму, п коромыслами, среднее из которых жестко закреплено на подвижной раме, а остальные - шарнирно, при этом все коромысла связаиы между собой иосредством
шарпнрпо-рычажной системы в внде «нюрнбергских ножниц, а с нодвнл ;ной рамой - носредетвом гндроцилппдров, прикрепленных к крайним коромыслам, которые установлены на рельеовые тележки и
связаны со смежными с ннмн коромыслами носредетвом гндроцнлппдров, а рабочне органы закренлены на коро:.ыслах. Источники информации, прппятые во впимаине нри экспертизе
1. Авторское свндетельетво СССР № 518550, кл. Е 01В 29/13, 02.09.74.
| название | год | авторы | номер документа |
|---|---|---|---|
| Машина для передвижки шпал железнодорожного пути | 1974 |
|
SU518550A1 |
| Устройство для передвижки шпал | 1983 |
|
SU1076512A1 |
| Вибрационный уплотнитель балласта | 1986 |
|
SU1399387A1 |
| Устройство для сборки рельсошпальной решетки железнодорожного пути | 1983 |
|
SU1120050A1 |
| УСТРОЙСТВО ДЛЯ УДАЛЕНИЯ БАЛЛАСТА ИЗ-ПОД ПОДОШВЫ РЕЛЬСА ЖЕЛЕЗНОДОРОЖНОГО ПУТИ | 2005 |
|
RU2293812C1 |
| Шпалоподбоечная машина | 1955 |
|
SU101512A1 |
| Машина для стабилизации железнодорожного пути | 1980 |
|
SU931890A1 |
| Устройство для отвертывания и завертывания элементов крепления рельсошпальной решетки железнодорожного пути | 1978 |
|
SU753967A1 |
| Устройство для транспортирования и производства сборочно-разборочных операций с рельсовыми звеньями | 1972 |
|
SU485043A1 |
| Звеносборочная линия | 1979 |
|
SU887681A1 |
.. fFt-Ei +ggCTZrE -, i f ./
i.,-.- q|GiS jglCi
- - ----T Л 31 « 7775 1Z 11Ю 3 77 ff 28 « 7
