(через дроссельный сумматор 5) восстановилось равновесие элемента сравнения
- р (п зд) Т
где
/X 1 +
р- к. -
- коэффициент усиления регулятора; а,Р - проводимость соответственного ностоянного переменного дросселей сумматора 5. Таким образом, с помощью дроссельного сумматора обеспечивается настройка коэффициента усилеиия регулятора в пределах
от/((
;50.
Интегрирующее действие регулятора достигается введением комбинации единичной положительной и нецелой отрицательной (через дроссельный сумматор 5) запаздывающих связей - открытием дросселя 2. Если в результате изменения входных давлений нарущается равенство Рп Рзк, то давление РВЫХ на выходе регулятора изменится и на переменном дросселе 2 возпикнет перепад давлений Р, определяемый величиной рассогласования и настройкой дроссельного сумматора 5.
ДР.-Л-р(Р„-Язд).
При этом давление в емкости 3 тоже начнет изменяться со скоростью, примерно пропорциональной АР, причем величипа коэффициента пропорциональности определяется степенью открытия дросселя 2. В результате выходное давлеиие изменяется до тех пор, пока в замкнутой системе «объект - регулятор не восстановится равиовесие
РП РЗД.
Таким образом, в первом приблил ении нредложенный регулятор реализует нронорционально-интегральный закон.
Более строгий анализ схемы и динамических особенностей регулятора (с учетом инерционности дроссельиого сумматора) показывает, что уточненная передаточная функция регулятора имеет вид
,(5) Д-р /« + 5(7
X
V I Р т S 4- 1 1
X 1- а «3 -f- 1
Vp/
где
V
RB-f
постоянная времени звена «дроссель 2 - емкость 3 (7 - проводимость дросселя 2, V - объем камеры 3);
V,
Vt
Т,
П
KQ
RQa
камеры
элемента сравне7
т -
Г-Г,
Легко показать, что по сравнению с прототипом в предложенном регуляторе влияние динамических неиДеальностей сказывается в гораздо меньщей степени: его область пормальной работы в Др раз щире, причем балластное звено обладает положительным фазовым сдвигом, что дополнительно создает эффект прямого предварения.
Формула изобретения
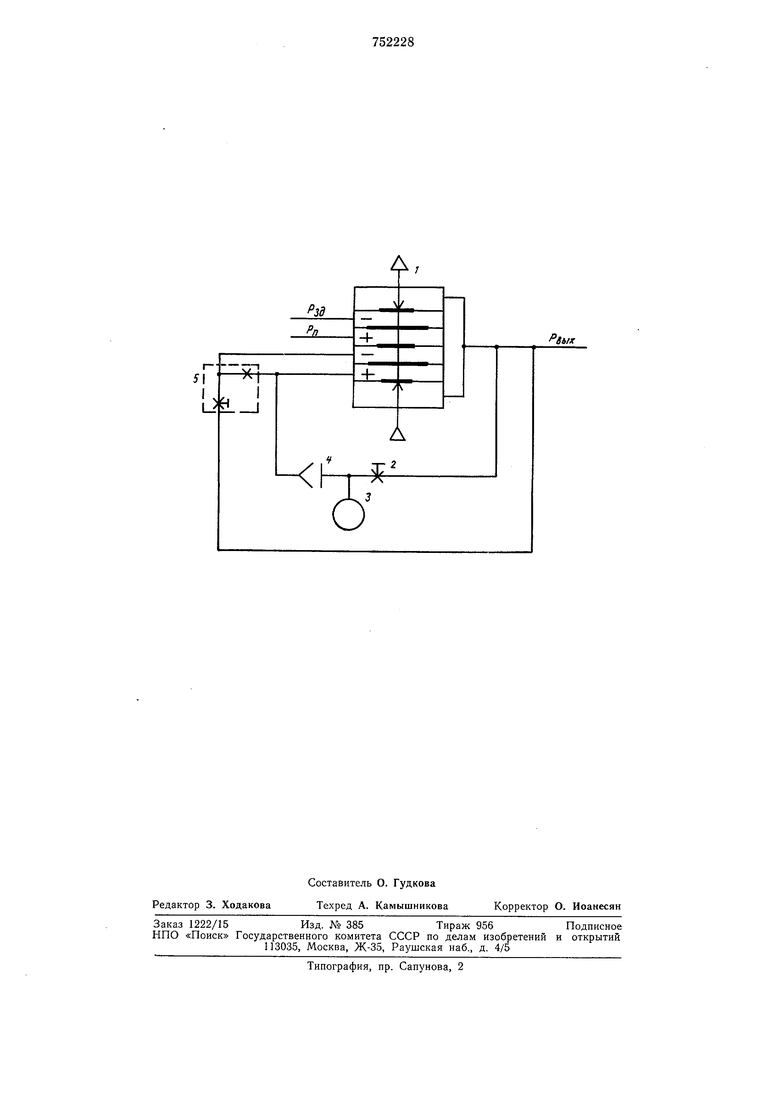
Пневматический регулятор, содержащий элемент сравнения, первые плюсовая и минусовая камеры которого соединены соответственно с каналами параметра и задания, а выход подключен к выходному каналу регулятора и первому входу дроссельного сумматора, а через переменный дроссель к емк(;с;л и ;:,1зторителю, выход которого соедииен со вторым входом дроссельного сумматора, отличающийся тем, что, с целью улучщения динамических характеристик регулятора, в нем вторые плюсовая и минусовая камеры регулятора соединены соответственно с выходом повторителя и выходом дроссельного сумматора. Источники информации,
принятые во внимание прп экспертизе
1.Инструкция по эксплуатации пневматического пропорционально-интегрального регулятора типа ПР3.21, Тизприбор, 1970.
2.Штейнберг Ш. Е. и др. Промышленные автоматические регуляторы. М., «Энергия, 1973, с. 316, рис. 9-4 (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| Пневматический пропорционально-интегрально-дифференциальный регулятор | 1982 |
|
SU1043587A1 |
| Пневматический регулятор | 1978 |
|
SU664154A1 |
| Пневматический регулятор | 1987 |
|
SU1474589A1 |
| Пневматический регулятор | 1982 |
|
SU1040466A1 |
| Устройство для регулирования технологических процессов | 1977 |
|
SU630613A2 |
| Пневматический адаптивный регулятор с переменной структурой | 1983 |
|
SU1285429A1 |
| Пневматический регулятор | 1978 |
|
SU752229A1 |
| Пневматический регулятор с переменной структурой | 1976 |
|
SU631868A1 |
| Пневматический адаптивный регулятор с переменной структурой | 1977 |
|
SU742872A1 |
| Пневматическое дифференцирую-щЕЕ уСТРОйСТВО | 1979 |
|
SU830407A1 |