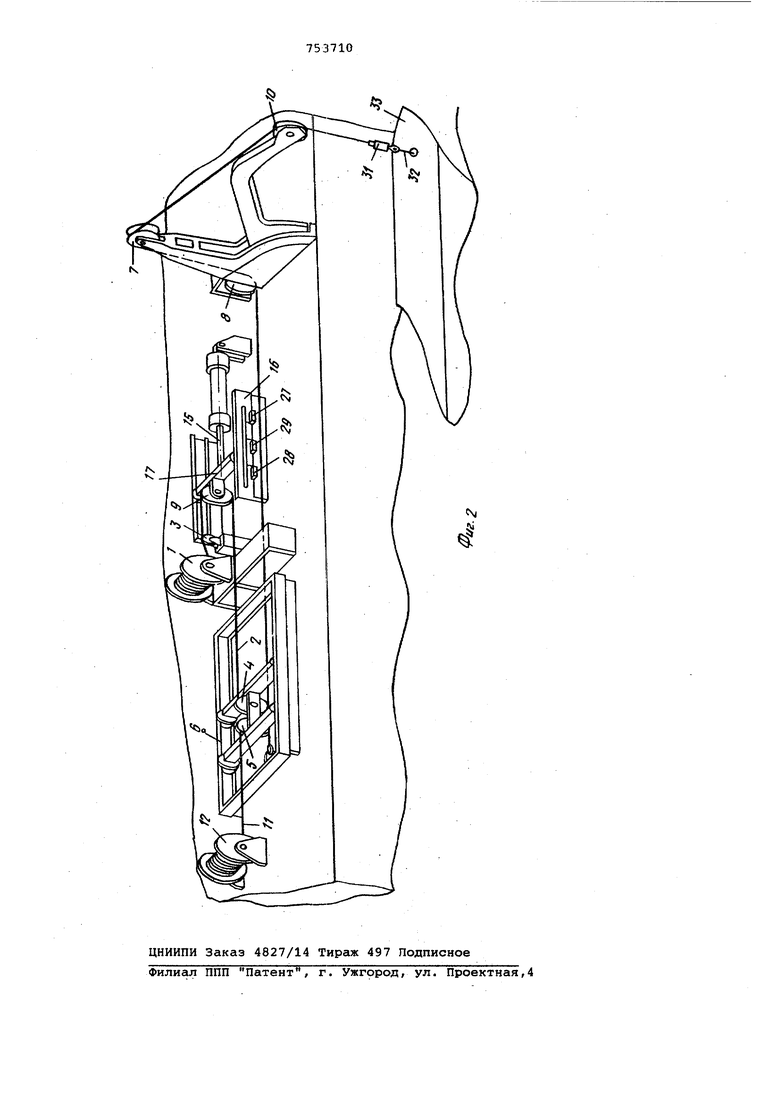
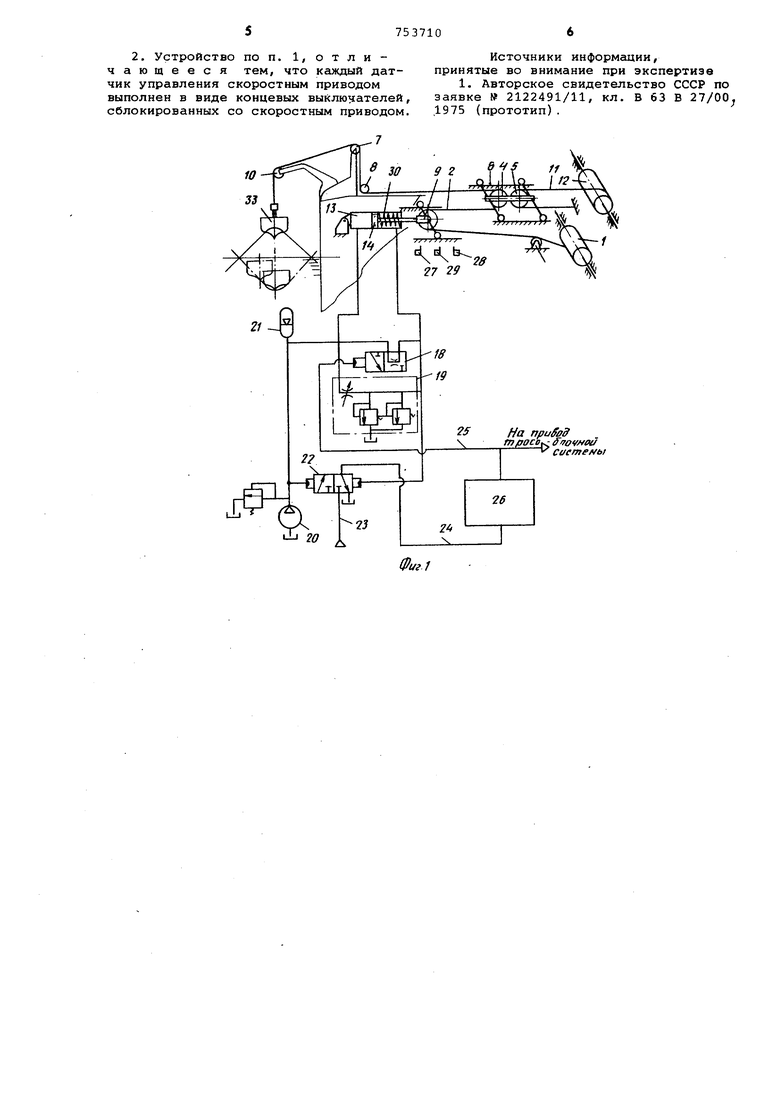
манду на остановку грузового привода 1 при достижении в грузовом тросе эа данного усилия обтягиБания, блоки 4 и 5, перемещающиеся в направляющих 6, и блоки 7-9 и 10 с блоком 4 посредством каната 11 и блока 5 связан ско ростной привод 12. В устройство также входит гидроцилиндр 13 с поршнем 14 и штоком 15, связанным с трособлоч ной системой через блок 9,установленный с возможностью перемещения по направляющим 16, на тележке 17 обе полости гидроцилиндра 13 заполнены жидкостью и связаны между собой запорнцм клапаном 18, параллельно с которым установлен дроссель с предохранительным клапаном 19. Устройство также снабжено насосным агрегатом 20, гидроаккумулятором 21, связанным с насос ным агрегатом 21, поршневой полостью гидроцилиндра 13 и с полостью упргшления двухпозиционного золотника 22. В системе есть источник управляющего давления, связанный трубопроводами 23-25 через двухпозиционный золотник 22 с блоком управления 26 и запорным клапаном 18. Шток 15 гидроцилиндра 13 посредством тележки 17, на которой установлен блок 9, сопрягается с направляющими 16, на которых по ходу движения Тележки 17 установлены датчики управ ления выполненные в виде концевых выключателей 27 и 28 формирующие ко манду соответственно на выбирание ил травление каната 11 и концевой выклю чатель 29, формирующий команду на остановку скоростного привода,обеспе чивает скорость травления - выбирани грузового троса, соединенного с объе том, больше скорости перемещения объ екта на волне. В штоковой полости гидроцилиндра 13 установлена пружина 30, Грузовой трос оборудован захватом .31 сопрягающимся с ответным узлом 32 поднимаемого объекта 33. Устройство работает следующим образом. Объект 33 при волнении совершает колебательные движения с вершин волны на ее подошву и обратно. .Если после соединения захвата 31 устройство с ответным узлом 32 объек та 33 объект пойдет вниз к подошве волны, то грузовой трос обтянется и датчик усилия 3 остановит грузовой привод 1. Одновременно полость управ ления запорного клапана 18 через тру бопровод 25 и блок управления 26 переключится на слив и запорный клапан откроется, соединив между собой полости ги,роцилиндра 13. Гидроцилиндр отслеживает перемещение объекта 33 следующим образом. Под действием усилия натяжения в грузовом канате 2 шток 15 гидроцилиндра. 13 сжимает пружину 30 и выдвигается из цилиндра.Объект 33 перемещается вниз.Достигнув подошвы волны, объект начинает перемещение вверх на вершину волны,при этом пружина 30, распрямляясь,выдвигает шток 15 во внутрь цилиндра 13.Тележка 17 штока 15 воздействует на концевой выключаель 27,подающий команду на выбирание каната 11 скоростным приводом 12.Так как скорость выбирания канала 11 скоростным приводом 12 больше скорости пере1.ещения объекта на волне,то шток 15, сжимая пружину 30, приводит поршень 14 в среднее положение, где тележка 17 воздействует ь;а концевой выключатель 29, который останавливает скоростной привод 12.В дальнейшем гидроцилиндр 13, отслеживая перемещения объекта 33 на волне, работает в зоне слежения. Скоростной при вод 12 может включиться в работу также, если придет волна, высота которой выше расчетной. Формула изобретения ,1 Устройство для выборки слабины в грузовых тросах на волнении, содержащее грузовой привод тросо-блочной системы, гидроцилиндр с подпружиненным штоком, насосный агрегат, гидроаккуг лятор, источник управляющего давления, двухпозиционный золотник, блок управления, запорный клапан, дроссель с предохранительным клапаном, причем подпружиненный шток гидроцилиндра снабжен блоком на тележке, установленной с возможностью перемещения по направлякщим и связан с тросо-блочной системой, при этом поршневая и штоковая полости гидроцилиндра связаны между собой через запорный клапан, параллельно которому установлен дроссель с предохранительным клапаном, отличающееся тем, что, с целью повышения надежности работы и устранения рывков, оно снабжено скоростным приводом с канатом, двумя блоками и направляющими, датчиком усилия и датчиками управления скоростным приводом, причем свободный конец каната скоростного привода закреплен неподвижно на корпусной конструкции и запасован через один из упомянутьах блоков, которые установлены с возможностью перемещения по направляющим, а их оси вращения связаны между собой обоймой, при этом датчик усилия выполнен сопряженным с грузовым тросом и связан с грузовым приводом, а датчики управления скоростного привода смонтированы на направляющих блока, связанного со штоком гидроцилиндра и выполнены сопряженными с тележкой бло ка гидроцилиндра. 2. Устройство по п. 1, отличающееся тем, что каждый датчик управления скоростным приводом выполнен в виде концевых выключателей, сблокированных со скоростным приводом. Источники информации, принятые во внимание при экспертизе 1. Авторское свидетельство СССР по заявке 2122491/11, кл. В 63 В 27/00 1975 (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для выборки слабины в грузовых канатах спуско-подъемных устройств на волнении | 1975 |
|
SU652035A1 |
| Устройство для передачи людей и грузов в море | 1976 |
|
SU602404A1 |
| УСТРОЙСТВО ДЛЯ СПУСКА И ПОДЪЕМА ПЛАВАЮЩЕГО ОБЪЕКТА | 1991 |
|
RU2013290C1 |
| Самоходная многоопорная фронтальная дождевальная машина | 1982 |
|
SU1093301A1 |
| Устройство для передачи людей и грузов в море с обслуживающей платформы на судно | 1981 |
|
SU954320A1 |
| ГИДРАВЛИЧЕСКИЙ ПРИВОД ЛЮКОВОГО ЗАКРЫТИЯ | 2008 |
|
RU2364542C1 |
| Устройство для выборки слабины в канатах судоподъемных устройств на волнении | 1972 |
|
SU447322A1 |
| Судовое устройство для передачи грузов и пересадки людей в море | 1989 |
|
SU1615042A1 |
| Судовое спуско-подъемное устройство для плавающих объектов | 1988 |
|
SU1569280A1 |
| СПОСОБ УПРАВЛЕНИЯ ПОДЪЕМОМ ДВУХКОРПУСНОГО ПЛАВУЧЕГО ОБЪЕКТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2014 |
|
RU2556135C1 |