Изобретение относится к устройствам для транспортирования различных изделий с шаговой подачей в рабочую зону (циклическое движение 5 шаг-выстой) и может быть использовано в таких отраслях промыиленности, как машиностроение, радиотехническая и электронная промышленность в процессе производства радиодеталей и to элементов микросхем.
Известно устройство для получения линейных шаговых перемещений с выстоем, имеющее регулятор цикла шагвыстой. Причем регулятор цикла является электрическим и включает в себя бесконтактный датчик, линейку-эадатчик шага, которая установлена на направляющих каретки с возможностью углового фиксированного перемещения носительно направляющих каретки 1 .
Недостатком этого устройства является его сложность, обусловленная наличием электрического блока для управления величиной шага, величина 25 выстоя не регулируется.
Наиболее близким решением из известных является устройство для шаговых линейных перемещений, содержащее основание с направляющими для пере- JQ
мещения каретки, установленной при помощи гайки на ходовом винте, задатчик цикла и привод 2.
Недостатком указанного устройства является его ненадежность, обусловленная наличием электронной схемы управг JIeния и отсутствием регулятора выстоя.
Целью настоящего изобретения является упрощение конструкции и повышение надежности устройства.
Указанная цель достигается тем, что задатчик цикла выполнен из закрепленного на торце ходового винта кулачка с двумя клиновидными выступами и двух роликов, установленных на винтовых осях, с возможностью их осевого перемещения и взаимодействия с выступами кулачка.
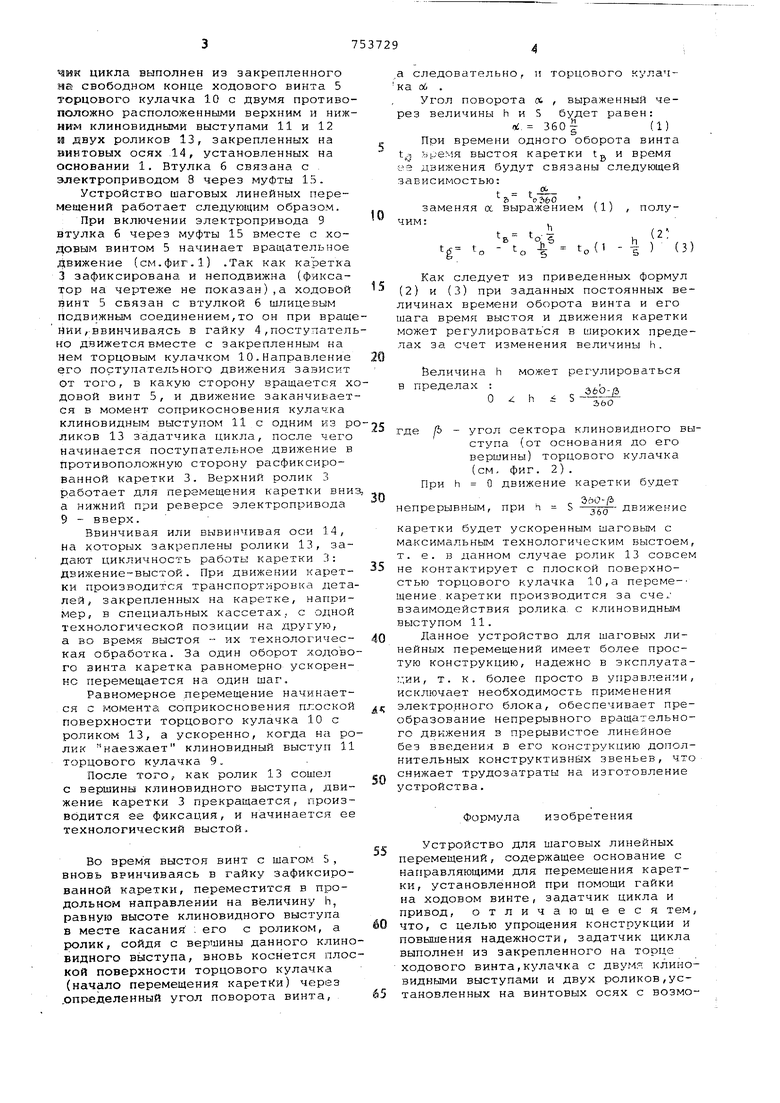
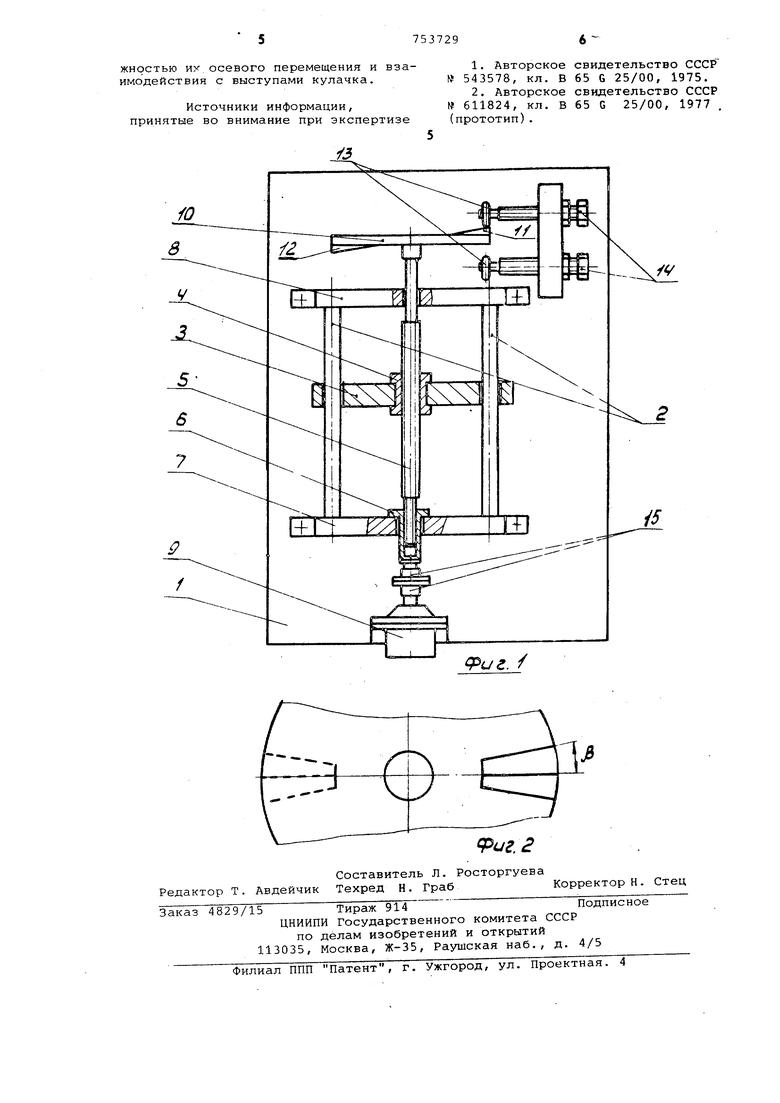
На фиг. 1 изображен общий вид устройства;, на фиг. 2 - торцовый кулачок (вид сверху).
Устройство для шаговых линейных перемещений содержит основание 1, направляющие 2, каретку 3 с закрепленной на ней гайкой 4, ходовой винт 5, связанный шлицевым подвижным соединением с втулкой 6. Направляющие 2 закреплены в стойках 7 и 8, а втулка 6 х:вязана с электроприводом 9, Задатцикла выполнен из закрепленного ма свободном конце ходового винта 5 торцового кулачка 10 с двумя противо положно расположенными верхним и ниж ним клиновидными выступами 11 и 12 п двух роликов 13, закрепленных на винтовых осях .14, установленных на основании 1. Втулка б связана с , электроприводом 8 через муфты 15. Устройство шаговых линейных перемещений работает следующим образом. При включении электропривода 9 втулка б через муфты 15 вместе с ходовым винтом 5 начинает вращательное Движение (см.фиг.1) .Так как каретка 3 зафиксирована и неподвижна (фиксатор на чертеже не показан),а ходовой винт 5 связан с втулкой 6 шлицевым подв 1жным соединением,то он при вращ нии, ввинчиваясь в гайку 4,поступател но движется вместе с закрепленным на нем торцовым кулачком 10.Направление его поступательного движения зависр-т от того, в какую сторону вращается х довой винт 5, и движение заканчиЕ1ает ся в момент соприкосновения кулачка клиновидным выступом 11 с одним из р ликов 13 задатчика цикла, после чего начинается поступательное движение в противоположную сторону расфиксированной каретки 3. Верхний ролик 3 работает для перемещения каретки вни а нижний при реверсе электропривода 9 - вверх. Ввинчивая или вывинчивая оси 14, на которых закреплены ролики 13, задают цикличность работы каретки 3: движение-выстой. При движении каретки производится транспортировка дета лей, закрепленных на каретке, например, в специальных кассетах, с одной технологической позиции на другую, а во время выстоя -- их технологическая обработка. За один оборот ходово го винта каретка равномерно ускоренно перемещается на один шаг. Равномерное деремещение начинается с момента соприкосновения плоской поверхности торцового кулачка 10 с роликом 13, а ускоренно, когда на ро лик наезжает клиновидный выступ 11 торцового кулачка 9. После того, как ролик 13 сошел с вершины клиновидного выступа, движение каретки 3 прекращается, производится ее фиксация, и начинается ее технологический выстой. Во время выстоя винт с шагом S, вновь ввинчиваясь в гайку зафиксированной каретки, переместится в продольном направлении на величину h, равную высоте клиновидного выступа в месте касания . его с роликом, а ролкк, сойдя с вершины данного клино видного выступа, вновь коснется плос кой поверхности торцового кулачка (начало перемещения каретКи) через .определенный угол поворота винта. .а следовательно, и торцового кулачка ud . Угол поворота л , выраженный через величины h и 5 будет равен: ч:, 360| (1) При времени одного оборота винта .л выстоя каретки tg и время ее движения будут связаны следующей зависимостью: оЪЬО заменяя ос выражением -- tod Как следует из приведенных формул (2) и (3) при заданных постоянных величинах времени оборота винта и его шага время выстоя и движения каретки может регулироваться в широких пределах за счет изменения величины h. Величина h может регулироваться в пределах : h i S где fb - угол сектора клиновидного выступа (от основания до его вершины) торцового кулачка (см. фиг. 2). При h О движение каретки будет 360-/i S -360 движение непрерывным, при h каретки будет ускоренным шаговым с ма-ксимальным технологическим выстоем, т. е. в данном случае ролик 13 совсем не контактирует с плоской поверхностью торцового кулачка 10,а переме-щение. каретки производится за взаимодействия ролика, с клиновидным выступом 11. Данное устройство для шаговых линейных перемещений имеет более простую конструкцию, надежно в эксплуата1:,ии, т. к. более просто в управлении, исключает необходимость применения электронного блока, обеспечивает преобразование непрерывного вращательного движения в прерывистое линейное без введения в его конструкцию дополнительных конструктивньгх звеньев, что снижает трудозатраты на изготовление устройства. Формула изобретения Устройство для шаговых линейных перемещений, содержащее основание с направляющими для перемещения каретки, установленной при помощи гайки на ходовом винте, задатчик цикла и привод, отличающееся тем, что, с целью упрощения конструкции и повышения надежности, задатчик цикла выполнен из закрепленного на торце ходового винта,кулачка с двумя клиновидными выступами и двух роликов,установленных на винтовых осях с возмо
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для шаговых линейныхпЕРЕМЕщЕНий | 1979 |
|
SU846435A1 |
| Механизм шагового перемещения | 1975 |
|
SU652549A1 |
| ЧЕРВЯЧНАЯ ПЕРЕДАЧА, СПОСОБ ЕЕ ИЗГОТОВЛЕНИЯ, ОБОРУДОВАНИЕ И ИНСТРУМЕНТ ДЛЯ ЕЁ ВЫПОЛНЕНИЯ | 1998 |
|
RU2200262C2 |
| Устройство шагового перемещения | 1987 |
|
SU1441124A1 |
| УСТРОЙСТВО ДЛЯ ПОДАЧИ ЛЕНТОЧНОГО МАТЕРИАЛА | 1994 |
|
RU2081798C1 |
| Устройство для шаговых линейных перемещений | 1981 |
|
SU988688A1 |
| Устройство для электроэрозионной прошивки отверстий | 1986 |
|
SU1731489A1 |
| Устройство для шаговых перемещений | 1979 |
|
SU825404A1 |
| Станок для навивки пружин | 1982 |
|
SU1039623A1 |
| Устройство для шаговых перемещений | 1977 |
|
SU719935A1 |
