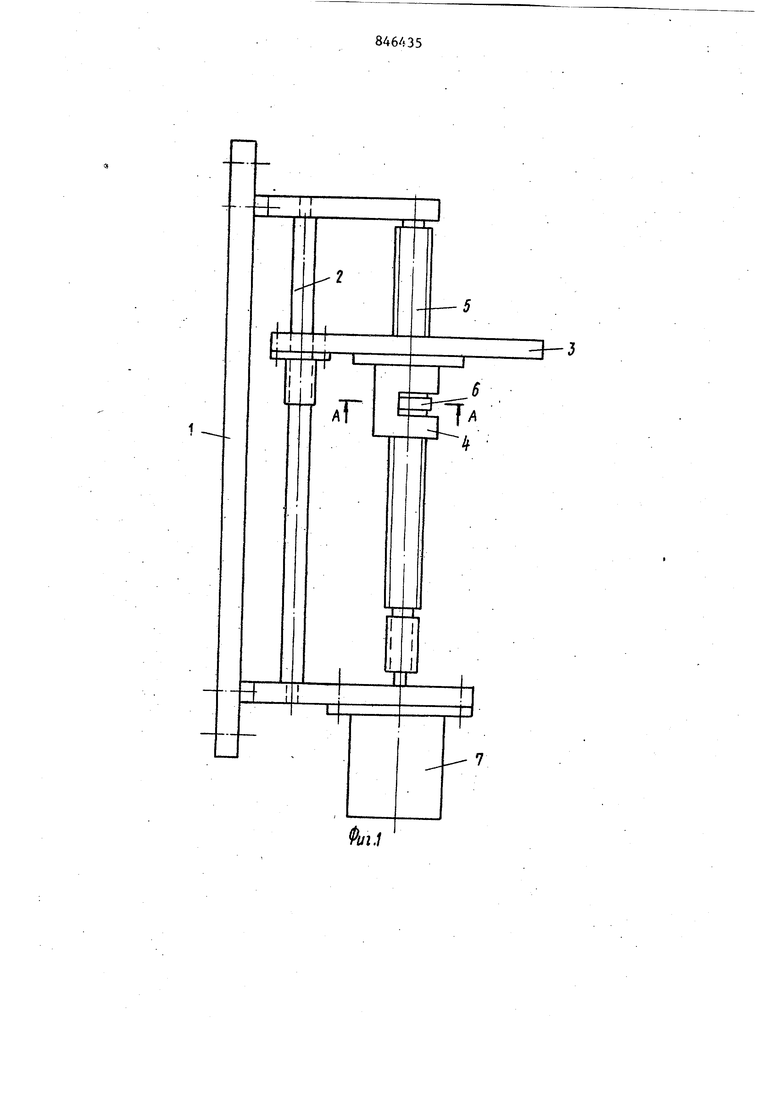
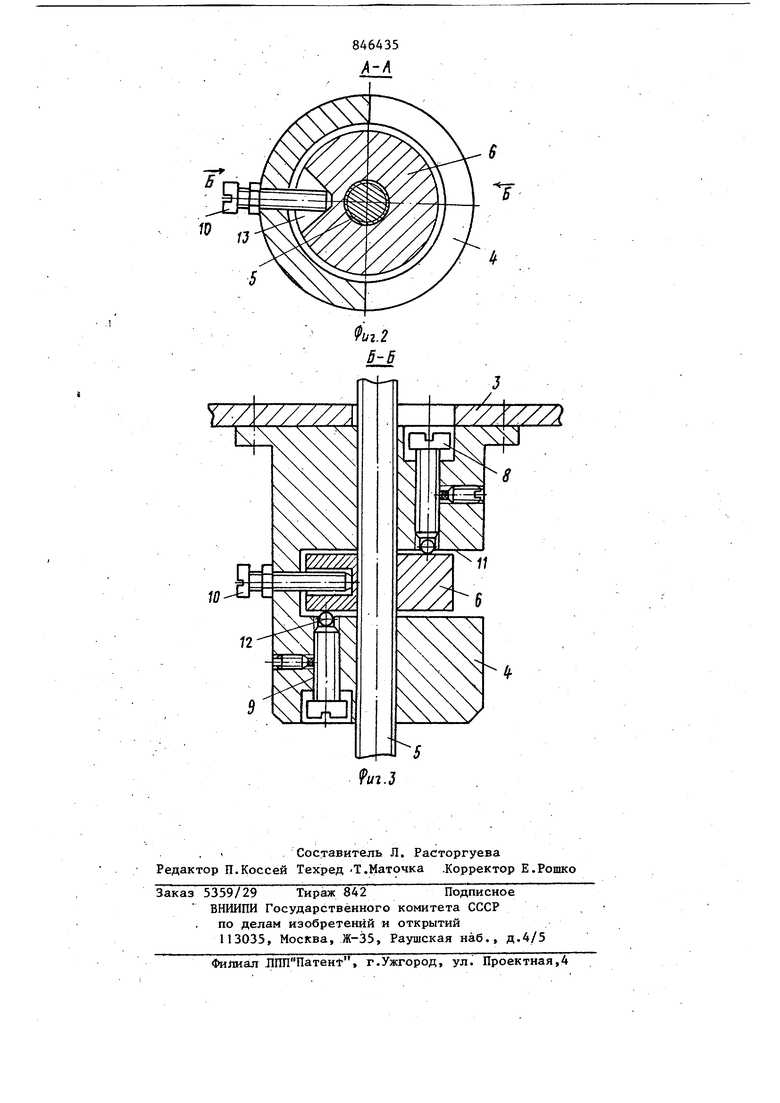
Изобретение относится к механизм и устройствам для транспортирования различных изделий с. шаговой подачей в рабочую зону и может быть использовано в таких отраслях промышленно ти, как машиностроительная, радиотехническая, электронная. Известно устройство для шаговых перемещений, которое имеет раму, каретку, установленную в направляющих с возможностью продольного пере щения, задатчик щага, считыватель /шага и пневмопривод U J. Недостатком данного устройства является низкая точность шаговых линейных перемещений, обусловленная инерционностью пневмопривода. Наиболее близким к предлагаемому является устройство для шаговых линейных перемеп1ений, содержащее неподвижн то раму, каретку, установлен ную на раме с возможностью продольного перемещения по направляющим, ходовую гайку, закрепленную на каретке, и ходовой винт, связанный с электроприводом. Это устройство содержит задатчик шага, выполненньш в виде закрепленной на каретке линейки со щелями, и установленный на раме считыватель шага с датчиком, содержащим источник света, и светоприемник, при этом источник света расположен по одну сторону линейки задатчика шага, а светоприемник по другую ее сторону. Перемещение каретки в этом устройстве осуществляется от электропривода. В момент совмещения щели линейки-задатчика шага с оптической осью источника света испускаемый им луч света через упомянутую щель попадает на светопри емник, который подает сигнал на останов электропривода. После определенной паузы вновь включается электропривод, и каретка совершает очередной . Недостатками данного устройства являются низкая точность шаговых ли38нейных перемещений и низкая надежнос работы устройства. Это обусловлено тем, что при возвратно-поступательно перемещении каретки в вертикальной плоскости электропривод нагружен, неравномерно, при перемещении каретки вверх момент на его валу больше, а при перемещении вниз-меньше. Такой режим работы электропривода отрицательно сказывается на схеме управлен электродвигателем, что приводит к ускоренному выходу схемы из строя. Кроме того, вследствие инерционности массы каретки, при перемещении ее вн возникает сбой по шагу, обусловленны инерционными угловыми смещениями ходового винта после останова электропривода. Цель изобретения,- повышение точности шаговых линейных перемещений и надежности работы устройства. Указанная цель достигается тем, что устройство снабжено смонтированной на ходовом винте гайкой спутником и тремя регулировочными упорами, закрепленными на ходовой гайке, причем в гайке-спутнике выполнен конический ограничительный паз, в,которо размещен один из регулировочных упоров , при этом два других упора уста новлены по разные стороны относитель но ходового винта на торцах ходовой гайки с возможностью взаимодействия с торцами гайки-спутника. На фиг. 1 изображено устройство для шйговых линейных перемещенийJ на фиг. 2 - разрез А-А на фиг.1; на фиг 3 - разрез В-Б на фиг.2. Устройство для шаговых линейных перемещений содержит раму 1,направляющую 2, каретку 3, ходовую гайку 4 ходовой винт 5, гайку-спутник 6, электропривод 7, регулировочные упоры 8-10, шаровые опоры 11,12, ограничительный паз 13 гайки-спутника 6. Ходовая гайка 4 закреплена на каретке 3. Б гайке-спутнике 6 выполнен паз l-3j и Она установлена на ходовом винту 5 в поперечном пазу ходовой гайки 4. На ходовой гайке 4 закреплены регулировочные упоры 8-10. Регулировочный упор 10 одним концом закреплен на ходовой гайке 4, второй конец которого установлен в коническом ограничительном пазу 13 гайкиспутника 6. Регулировочные упоры 8 и 9 установлены противоположно друг другу на торцах ходовой, гайки 4 и ко цами опираются на шаровые опоры 11 и 12, контактирующие с торцами гайкиспутника 6. Устройство работает следующим образом. При ввернутом до упора в конический ограничительный паз 13 гайкиспутника 6 регулировочного упора 10 и ослабленных регулировочных упоров 8 и 9 (фиг.2,3), гайка-спутник 6 при вращении ходового винта 5 перемещается в осевом направлений вместе с ходовой гайкой 4. Несколько вывернув регулировочный упор 10 предоставляют гайке-спутнику 6 возможность некоторого углового смещения относительно оси ходового винта 5 в пределах ширины конического ограничительного паза 13 в местах касания его боковых стенок с концом регулировочного упора 10. Вследствие силы трения между ходовым винтом 5 и гайкой-спутником 6 после включения электропривода 7, она начинает вращаться.вместе с ходовым винтом 5ДО тех пор, пока одной из боковых стенок конического ограничительного Ьаза 13 не коснется конца регулировочного упора 10, закрепленного на ходовой гайке 4, после чего гайка-спутник 6 вместе с ходовой гайкой 4 начинает перемещаться в осевом направлении. Например, каретка 3 вместе с ходовой гайкой 4 и гайкойспутником 6 перемещается вниз СФИГ.1 и 3). Если теперь во время останова электропривода 7 подтянуть регулировочный упор 8, то он через шаровую опору 11 воздействует на гайку-спутник 6, обеспечивая ее натяг в в осевом направлении и некоторый угловой перенос, которые, при возобновлении движения Каретки 3 вниз, создают дополнительный тормозной момент, который увеличивает момент на валу электродвигатедя и гасит инерционность массы каретки. При реверсе электропривода 7 каретка 3 перемещается вверх. В начальый момент движения каретки,, гайкаспутник 6 вращается вместе с ходовым винтом 5 до тех пор, пока она противоположной стоповой конического ограичительного паза 13 не коснется кона регулировочного упора 10, после чео Она также начинает перемещаться в севом направлении -вверх вместе с одовой гайкой 4. Регулировочный упор . закрепленный на ходовой гайке 4, за этот промежуток времени нескольк удалится от шаровой опоры 11, а след вательно, и от гайки-спутника 6 снимает с нее ранее приложенное к ней тормозное усилие. После реверса электропривода 7 каретка .3 вновь на чинает перемещаться вниз. В начальный момент движения каретки 3 гайка-спутник 6 вращается вместе с ходовым винтом 5 до тех пор пока она вновь противоположной- сто.роной конического ограничительного паза 13 не коснется конца регулировочного упора 10, после чего она также начинает перемещаться в осевом направлении вниз вместе с ходовой гайкой 4. Регулировочный упор 8 закрепленный на ходовой гайке4, за этот промежуток времени приблизившись к шаровой опоре 11, воздействует через нее на гайку-спутник 6, вновь создав дополнительный тормозной момент. Таким образом, иепольдуя регулировочный упор 8 и воздействуя им через шаровую опору 11 н гайку-спутник 6, увеличивают момент валу электропривода 7 при перемещении каретки 3 вниз, выравнивая его с моментом на валу электропривода при перемещении каретки вверх, используя регулировочный упор 10, и манипулиру им, снимают ранее созданный и воздей ствующий на ходовой винт тормозной момент при Перемещении каретки вверх Регулировочный упор 9 в совокуп-. ности с шаровой опорой 12 служит для увеличения момента на валу электропривода при перемещении каретки ввер Таким образом, осуществляя манипуляцию регулировочными упорами, закрепленными на ходовой гайке, один из которых своим концом установлен в коническом ограничительном пазу гайки-спутника, а два других установлены противоположно друг другу на торцах ходовой гайки, можно в широких пределах воздействовать на условия работы электропривода, а также значительно снизить влияние инерционности массы каретки на точность выполнения заданных шаговых линейных перемещений. Формула изобретения Устройство для шаговых линейньгх перемещений, содержащее неподвижную раму, каретку, установленную на раме с возможностью продольного перемещения по направляющим, ходовую гайку, закрепленную на каретке, и ходовой винт, связанный с электроприводом, отличающееся тем, что, с целью повышения точности шаговых линейных перемещений и надежности работы устройства, оно снабжено смонтированной на ходовом винте гайкойспутником и тремя регулировочными упорами, закрепленными на ходовой гайке, причем в гайке-спутнике выполнен конический ограничительный паз, в котором размещен один из регулиро вочных упоров, при этом два других упора установлены по разные стороны относительно ходового винта на торцах ходовой гайки с возможностью взаимодействия с торцами гайки-спутника. . Источники информации, принятые во внимание при экспертизе 1.Авторское свидетельство СССР № 543578, кл. В 65 G 25/00, 1977. 2.Авторское свидетельство СССР № 611824, кл. В 65 G 25/00, 1977 (прототип).
АГ
№
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для шаговых линейных перемещений | 1978 |
|
SU753729A1 |
| Устройство для шаговых линейных перемещений | 1981 |
|
SU988688A1 |
| Устройство для шаговых перемещений | 1979 |
|
SU825404A1 |
| Устройство для шаговых перемещений | 1977 |
|
SU719935A1 |
| Механизм шагового перемещения | 1975 |
|
SU652549A1 |
| Шаговый конвейер | 1986 |
|
SU1393720A1 |
| Устройство для приема с намоточной машины и перегрузки наработанных паковок на транспортные средства | 1983 |
|
SU1105434A1 |
| Устройство для установки труб в трубные решетки теплообменников | 1983 |
|
SU1186452A1 |
| Устройство для шаговых перемещений плоских изделий | 1980 |
|
SU939349A1 |
| Способ подачи полосового материала к прессу и устройство для его осуществления | 1985 |
|
SU1279719A1 |