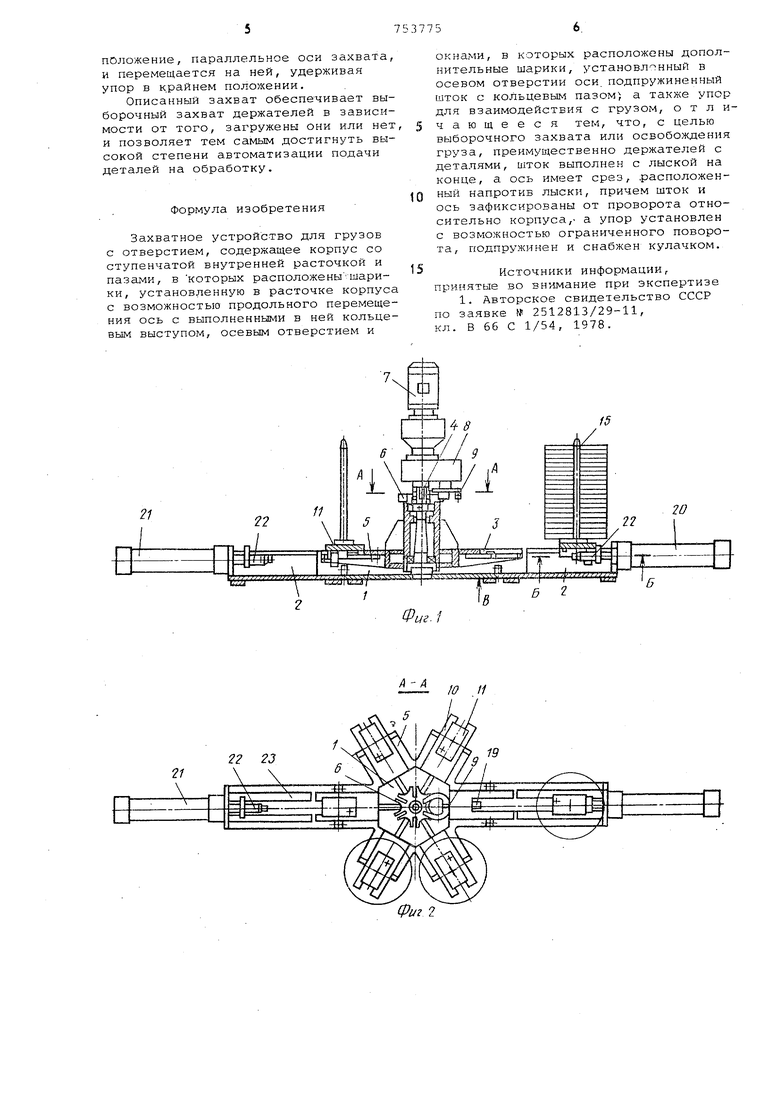
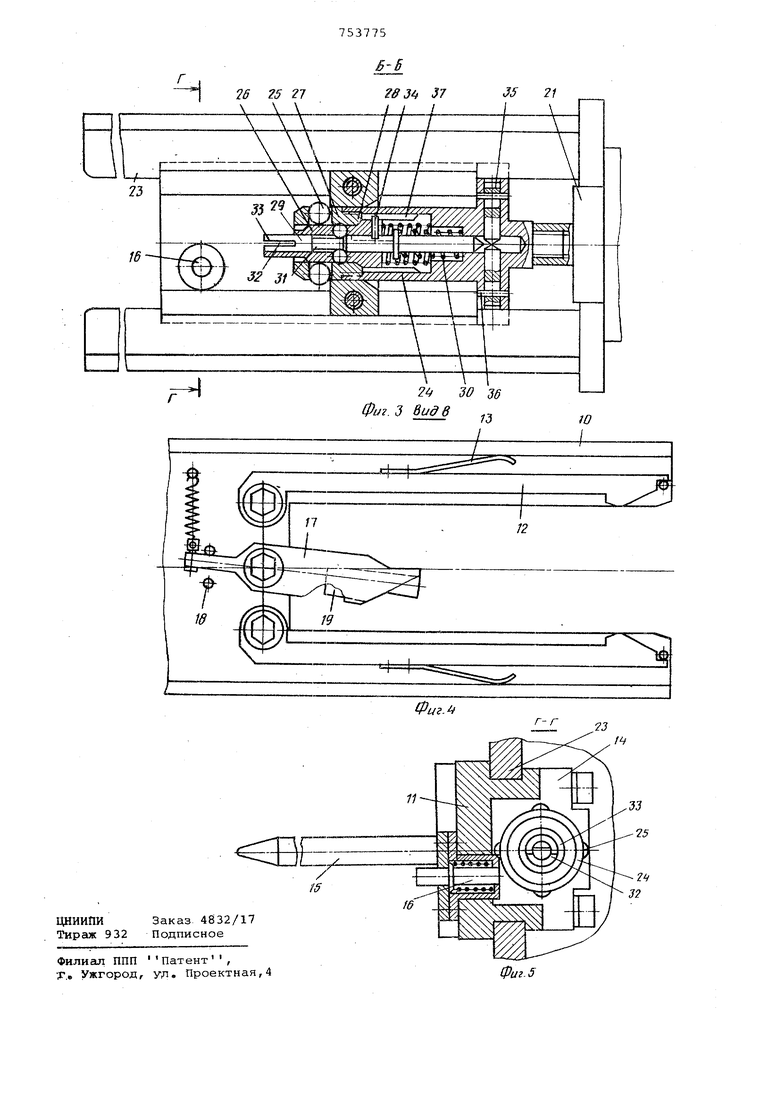
Изобретение относится к.грузозахватным устройствам, используемым,, в частности, для передачи деталей в об рабатывающих линиях. Наиболее близким к описываемому изобретению является захватное устройство для грузов с отверстием, содержащее корпус со ступенчатой внутренней расточкой и пазами, в которых расположены шарики, установленную в расточке корпуса с возможностью продольного перемещения ось с выполненными в ней кольцевым выступом, осевым отверстием и окнами, в которых расположены дополнительные шарики, у тановленный в осевом отверстии оси подпружиненный шток с кольцевым пазом, а также упор для взаимодействия с грузом l . Недостатком этого устройства явля ется невозможность выборочного захва та или освобождения груза. Целью изобретения является выборочный захват или освобождение груза преимущественно держателей с деталями. Поставленная цель достигается тем что шток выполнен с лыской на конце, а ось имеет срез, расположенный напротив лыски, причем шток и ось зафиксированы- от проворота относительно корпуса, а упор установлен с возможностью ограниченного поворота, подпружинен и снабжен кулачком. На фиг. 1 дан продольный разрез устройства накопления и подачи деталей, использующего захватное устройство для грузов с отверстием; на фиг. 2 - разрез А-А фиг. 1, вид сверху; на фиг. 3 - разрез Б-Б фиг.1; на фиг. 4 - вид В фиг. 1; на фиг. 5 - разрез Г-Г фиг. 3. Устройство содержит поворотный магазин-накопитель 1 и установленные с противоположных сторон этого магазина два подавателя 2 для введения деталей на держателе в магазин и забора их из этого магазина для подачи на обработку. Магазин-накопитель смонтирован на плите 3 и содержит ось 4, на которой установлен звездообразный ротор 5 с мальтийским крестом 6. Ротор при-, водится от двигателя 7 через редуктор 8 посредством кривошипа 9. Ротор 5 имеет парные кронштейны 10, в пазах между которыми установлены держатели 11 деталей, зафиксиованные от выпадания защелками 12, оджатыми пружинами 13. Держатели 11 ыполнены в виде П-образных з сечеии площадок и имеют перемычки 14 отверстием и штырь 15, на который адеваются детали - в данном случаа иски с отверстиями.
На держателе смонтирован также сквозной подпружиненьгый штырь 15..
На роторах 5 установлены подпружиненные поворотные упоры 17, ограниченные в своем повороте штифтами
18.На упорах 17 закреплены кулачки
19,взаимодействующие со штырем 16. Подаватели 2 смонтированы на платах, прикрепленных к плите 3 и содержат пневмоцилиндры 20, 21, захваты 22 и направляющие 23 для держателей 11, соосные кронштейнам 10 ротора .
Каждое захватное устройство содержит корпус 24 с внутренней ступенчатой расточкой. В стенках корпуса выполнены пазы, в которые помещены зачеканенные от выпадания шарики 25. В расточке корпуса находится подпружиненная ось 26, имеющая кольцевой выступ на внешней поверхности, осевое отверстие и пазы в стенках, в которые помещены дополнительные шарики 27, взаимодействующие с кольцевым выступом 28 расточки корпуса 24. 3 осевом отверстии оси 26 помещен шток 29, поджатый пружиной 30 и иглеющий кольцевой паз 31. Дополнительно шток 29 и ось 26 имеют соответственно лыску 32 и срез 33 на своих концах и, кроме того, шток с осью зафиксированы от проворота относительно корпуса 24 посредством штифта 34, Лыска 32 и срез 33 ориентированы в противоположные стороны друг относительно друга.
В радиальное сквозное сверление корпуса 24 захвата помещены сухари 35, удерживаемьзе шпильками 36. Оба подавателя аналогичны по конструкции, за исключением того, что их штоки 29 и оси 26 повернуты один относительно другой на ISO, то есть штифт 34 одного захвата выходит в верхний продольный паз 37 корпуса 24, а другого - в нижний.
Один из подавателей 2 (правый) служит для подачи деталей из магазина накопителя 1 на обработку,, а другой - подает детали в магазин после предварительной обработки.
Мстройство работает следующим образом.
При включении пневмоцилиндра 20 (например, правого) его шток перемещает .захват 22 к магазину-накопителю 1, пока корпус 24 не войдет в отверстие перемычки 14 держателя 11, находящегося в пазу между кронштейнагли 10 pioTOpa. При этом, если на штыре 15 имеются детали (стопа дисков) то они утапливают штырь 16, который друн
гим своим концом при помещении этого держателя в магазин поворачивает упор 17 против часовой стрелки (против действия пружины упора) воздействием на 5сулачок 19.. Поэтому захват 22 взаимодействует с упором 17 своим штоком 29 (его несрезанной частью), в результате чего шток отжимается относительно оси 26, шарики 27 западают в паз 31 и тем самым освобождают ось 26, которг1Я под действием пружины перемещается вперед и своим выступом раздвигает шарики 25. Последние выдвигаются из пазов корпуса 24 и обеспечивают захват держателя 11 за его пере 1ычку 14.
Одновременно отлсатый шток 29 раздвигает сухари 35 своим коническим хвостовиком,а сухари разжимают защелки 12 ,
Поэтому при обратном ходе штока пневмоцилиндра 20 захват 22 увлекает за собой ничем не удерживаемый держатель 11 с деталями в крайнее положение, где детали с держателя с помощью автономного механизма (не показан) поочередно подаются, на обработку.
После израсходования деталей пневмоцилиндр 21 перемещает держатель 11 в магазин. Однако упор 17 под действием своей пружины занял другое крайнее положение, и захват упирается кромкой оси 26 в этот упор. В результате ось 26 смещается назад, а шток 29 под-действием пружины 30 - вперед, фиксируя ось шариками 27 в заднем положении. Шарики 25 при это утапливаются, и при обратном ходе штока пневмоцилиндра 21 держатель остается в кронштейнах 10 магазина, зафиксированный защелками 12, которые он раздвинул при входе.
После поворота ротора 5 магазина на один или несколько шагов этот же захват аналогичным образом может подать другой держатель 11 с деталями на обработку. Однако, если держатель окажется без деталей, то упор 17 этого кронштейна ротора, будет находиться в положении, определяемом действием его пружины. Поэтому захват набежит на упор осью 26 и, как ранее описано в случае помещения держателя в магазин, не захватит тдержатель при своем обратном ходе,
Аналогично работает и второй () .захват. Разница заключается лиш в том, что благодаря развороту оси 26 .и штока 29 захват забирает пустые держатели (набегает штоком 29 на упо 17, н.аходящийся в положении, определяемом его пружиной) и оставляет в магазине заполненные, так как груз переключает упор 17 посредством штыря 16 и кулачка 19. При этом переключение упора 17 происходит до подхо.да к нему кромки оси 26, после чего штырь 16 переходит с наклонной части кулачка на его плоскость, занявшую положение, параллельное оси захвата и перемещается на ней, удерживая упор в крайнем положении. Описанный захват обеспечивает выборочный захват держателей в зависимости от того, загружены они или нет и позволяет тем самым достигнуть высокой степени автоматизации подачи деталей на обработку. Формула изобретения Захватное устройство для грузов с отверстием, содержащее корпус со ступенчатой внутренней расточкой и пазами, в которых расположенышарики, установленную в расточке корпус с возможностью продольного перемеще ния ось с выполненными в ней кольце вым выступом, осевым отверстием и окнами, в которых расположены дополнительные шарики, установленный в осевом отверстии оси. подпружиненный шток с кольцевым пазом) а также упор для взаимодействия с грузом, отличающееся тем, что, с целью выборочного захвата или освобождения груза, преимущественно держателей с деталями, шток выполнен с лыской на конце, а ось имеет срез, .расположенный напротив лыски, причем шток и ось зафиксированы от проворота относительно корпуса, а упор установлен с возможностью ограниченного поворота, подпружинен и снабжен кулачком. Источники информации, приЕятые во внимание при экспертизе 1. Авторское свидетельство СССР по заявке № 2512813/29-11, кл. В 66 С 1/54, 1978.
| название | год | авторы | номер документа |
|---|---|---|---|
| АВТОМАТИЧЕСКИЙ ЗАХВАТ РОДОВИКОВА | 2009 |
|
RU2394747C1 |
| АВТОМАТ ДЛЯ ИЗГОТОВЛЕНИЯ ПРОВОЛОЧНЫХ ИЗДЕЛИЙ СЛОЖНОЙ КОНФИГУРАЦИИ | 1992 |
|
RU2050216C1 |
| Устройство для автоматической передачи инструмента | 1976 |
|
SU656803A1 |
| Загрузочное устройство | 1981 |
|
SU984805A1 |
| Устройство для формования изделий "мюзле | 1977 |
|
SU751485A1 |
| Микроманипулятор для установки узлов механизма часов | 1982 |
|
SU1083154A1 |
| Револьверная головка | 1988 |
|
SU1696158A1 |
| Манипулятор для горизонтально-ковочных машин | 1981 |
|
SU1082540A1 |
| Полуавтомат для сборки секаторов | 1982 |
|
SU1144830A1 |
| Захватное устройство для изделий со штырем с фигурным концом | 1989 |
|
SU1659346A1 |
В
