(54) МЕХАНИЗМ ПОВОРОТА МАНИПУЛЯТОРА
| название | год | авторы | номер документа |
|---|---|---|---|
| Строповочный замок | 1980 |
|
SU933603A1 |
| ПЛАНЕТАРНАЯ ШАРОВАЯ МЕЛЬНИЦА | 1992 |
|
RU2049554C1 |
| УСТРОЙСТВО ДЛЯ ВЫБРОСА ГИЛЬЗ ОРУДИЙНОЙ УСТАНОВКИ | 2016 |
|
RU2653454C2 |
| МАНИПУЛЯТОР | 1999 |
|
RU2167100C1 |
| Промышленный робот | 1988 |
|
SU1542793A1 |
| Передающее устройство подвесного толкающего конвейера | 1978 |
|
SU747776A1 |
| Планетарная шаровая мельница | 1990 |
|
SU1780834A1 |
| Грузозахватное устройство | 1977 |
|
SU742338A1 |
| Автоматическая линия для транспортировки полуфабрикатов | 1973 |
|
SU653186A1 |
| Установка для изготовления биметаллических деталей | 1982 |
|
SU1069941A1 |
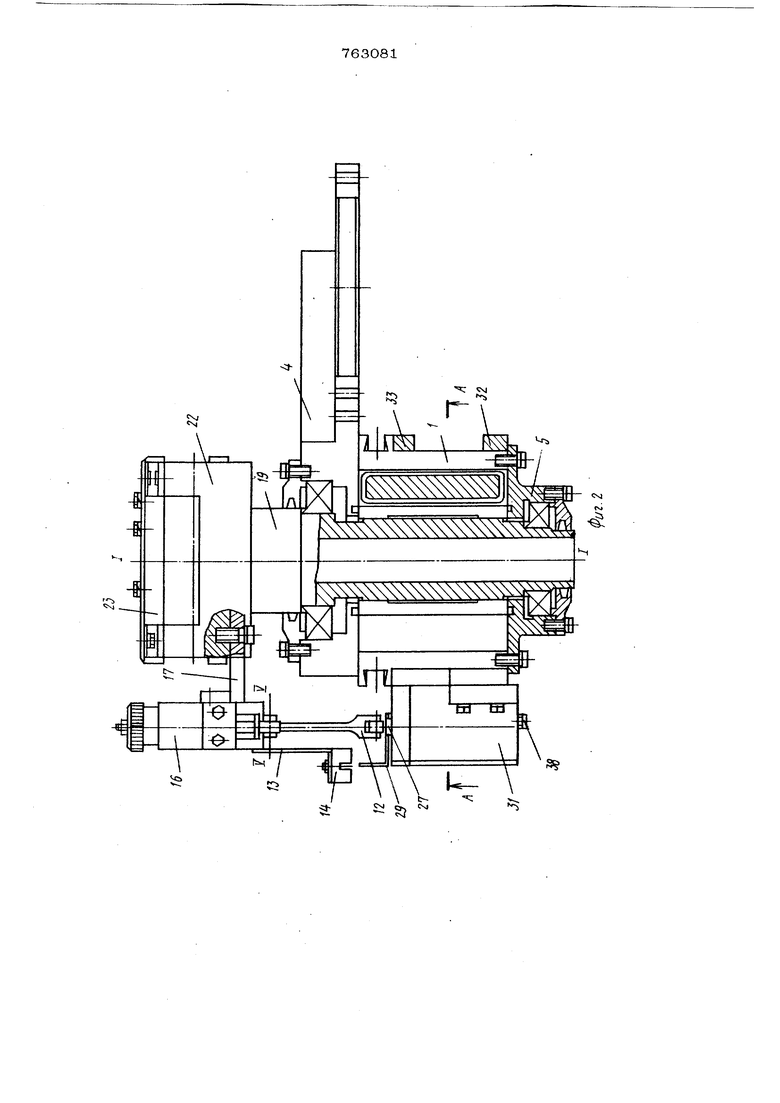
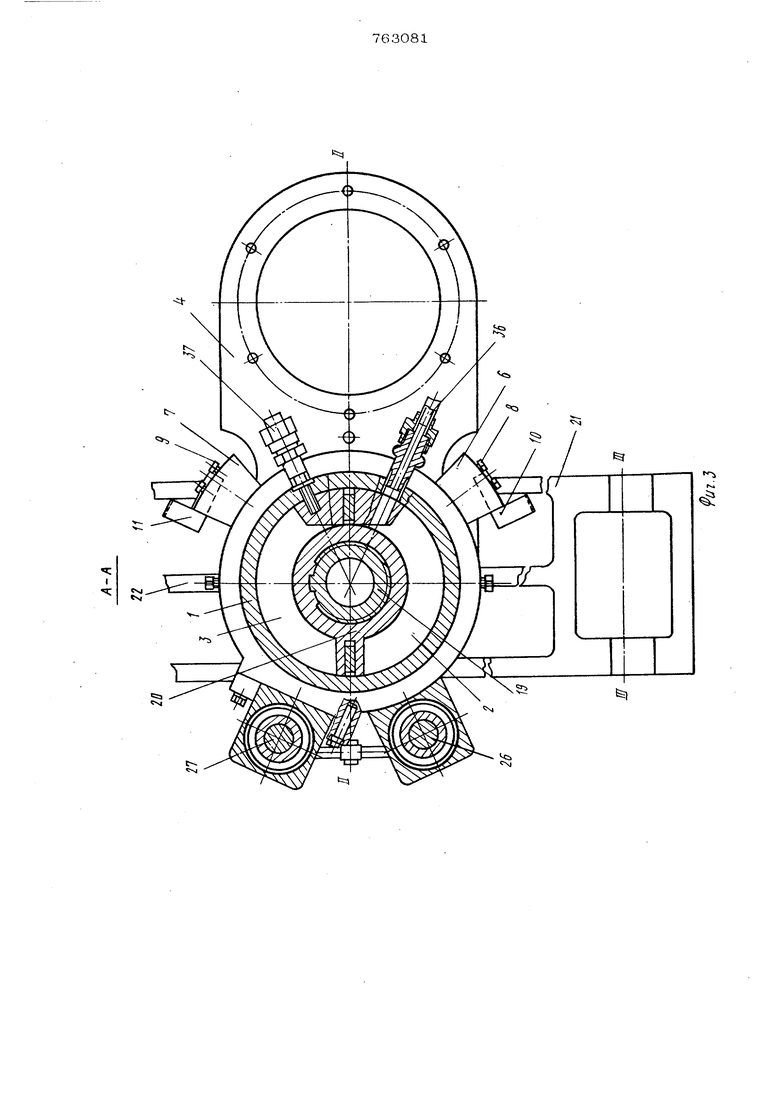
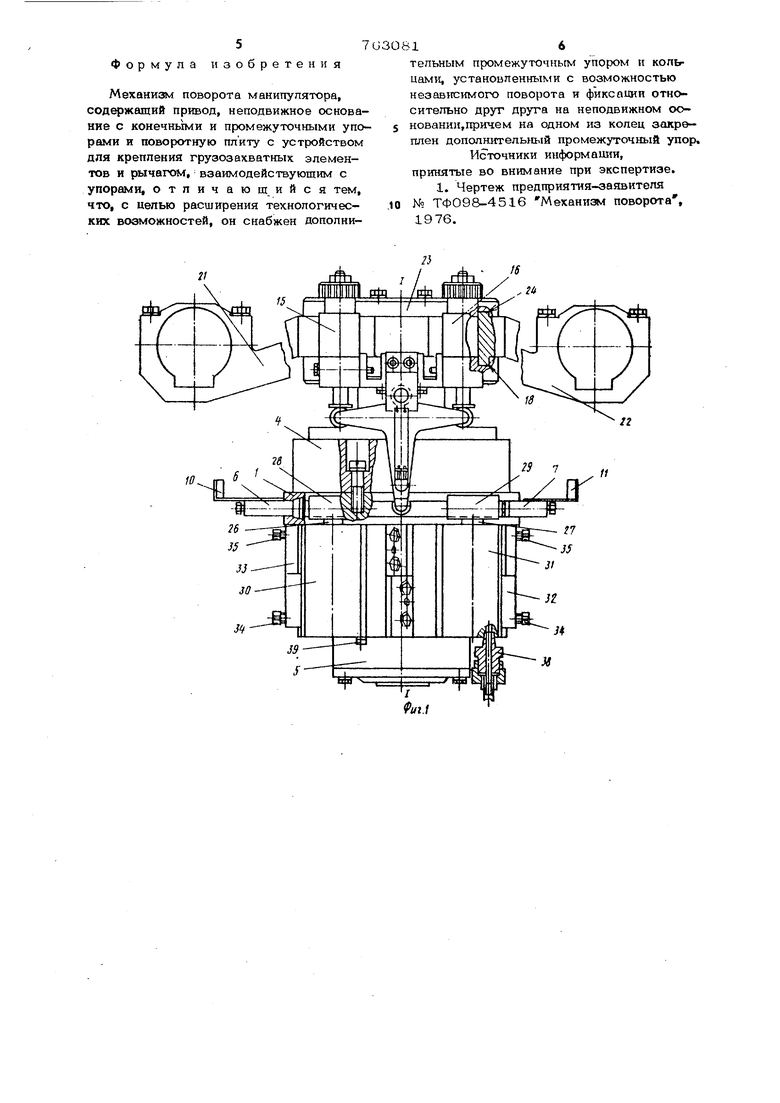
Изобретение относится к области машиностроения, в частности, касается манипуляторов и роботов с цикловыми программами управления, и предназначено для аагрузочно-раагрузочных работ. Известен механизм поворота манипулятора, содержащий привод, неподвижное с конечными упорами, промежуточный упор и приспособление для закрепления грузозахватного ус тройства Недостатками известной конструкции являются наличие одного управляемого упора, корпус которого закреплен неподвижно на корпусе пневмоцилиндра, раэдепяя рабочую зону при повороте вокруг вертикальной оси на две равные час ти, а также возможность установки толь ко одного грузозахватного устройства, что сужает технологические возможности. Цель изобретения - расширение технолсигических возможностей. Для достижения этого механиа(л поворота манипулятора снабжен допо нительным промежуточным упором и кольцами, установленными с возможностью независимого поворота и фиксации относительно друг друга на неподвижном основании, на одном из которых закреплен дополнительный промежуточный упор. На фиг. 1 показан обший вид предлагаемого механизма поворота манкпу лятора с кронштейнами для установки двух грузозахватных устройств, на фиг. 2- то же, вид сбоку, на фиг. 3 - разрез А-А на фиг. 2; на фиг. 4 - приспособление для установки одного грузозахватного устройства, на фиг. 5 - то же, вид сбоку, на фиг. 6, 7, 8 - схемы положений двух грузозахватных устройству На корпусе 1 моментного пневмоиилиндра, имеющего рабочие полости 2, 3и размещенного между плитой 4 и опорой 5, в кольцевой проточке закре1ь лены подвижно конечные упоры 6 и 7, положение которых фиксируется стопорами 8 и 9, с флажками 10 и 11. ftiчаг 12, несущий на себе кронштейн 13 с .датчиком 14 и гидравлическими демпферами 15 и 16, закреплен на кронштейне 17, соединенном с фландет д, имеющем кольцевую проточку 18, поворотной оси 19, несушей на себе ротор 20 и кронштейны 21, 22, которые крепятся с помощью крыти и 23, имеющей кольцевую проточку 24..
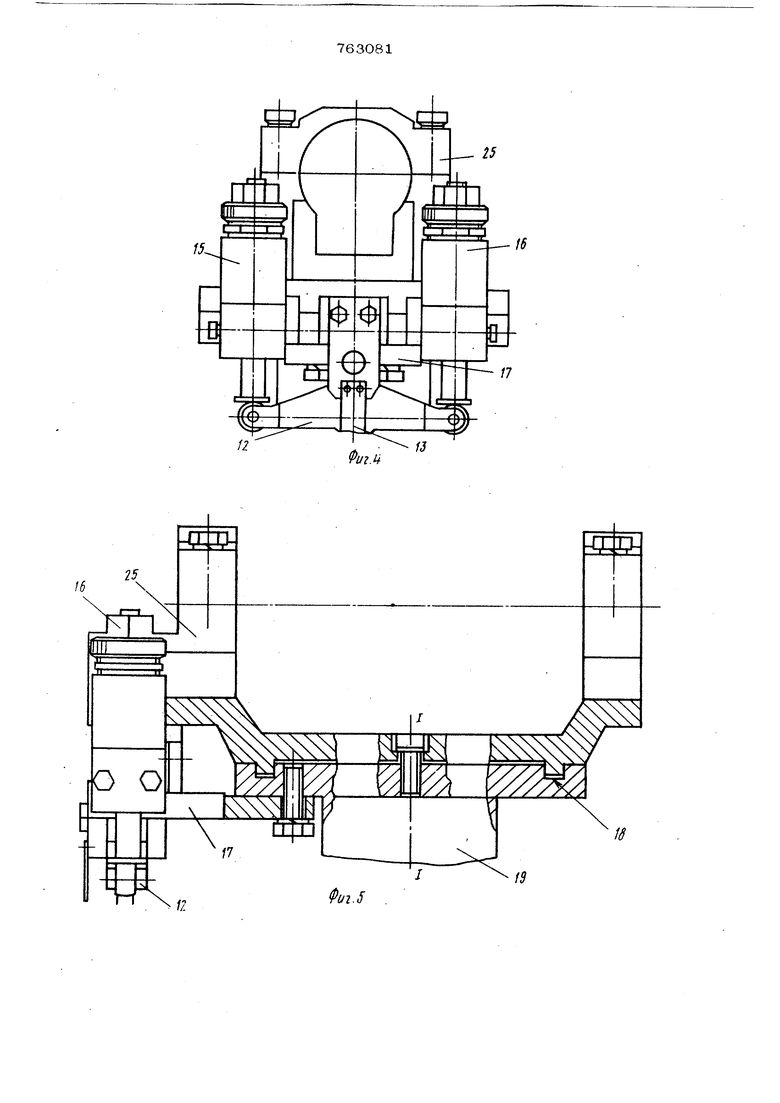
Вместо кронштейнов 21, 22 и крышки 23, предназначенных для крепления двух грузозахватных устройств (см. иг. 1), можно установить приспособление 25 для крепления одного грузозахватного устройства (см. фиг. 4).
Управляемые промежуточные упоры 26 и 27, на свободно выступающих онцах которых закреплены флажки 28 29, размещены в корпусах ЗО и 31, монтированных на кольцах 32 и 33, оторые фиксируются в заданном полоении стопорами 34 35. Штуцеры 36 37 установлены на корпусе 1, пневмоипиндра, а штуцеры 38 и 39- на корусах 30 и 31 промежуточных упоров 26 и 27.
.Работает модульмеханизма поворота следующим образом.
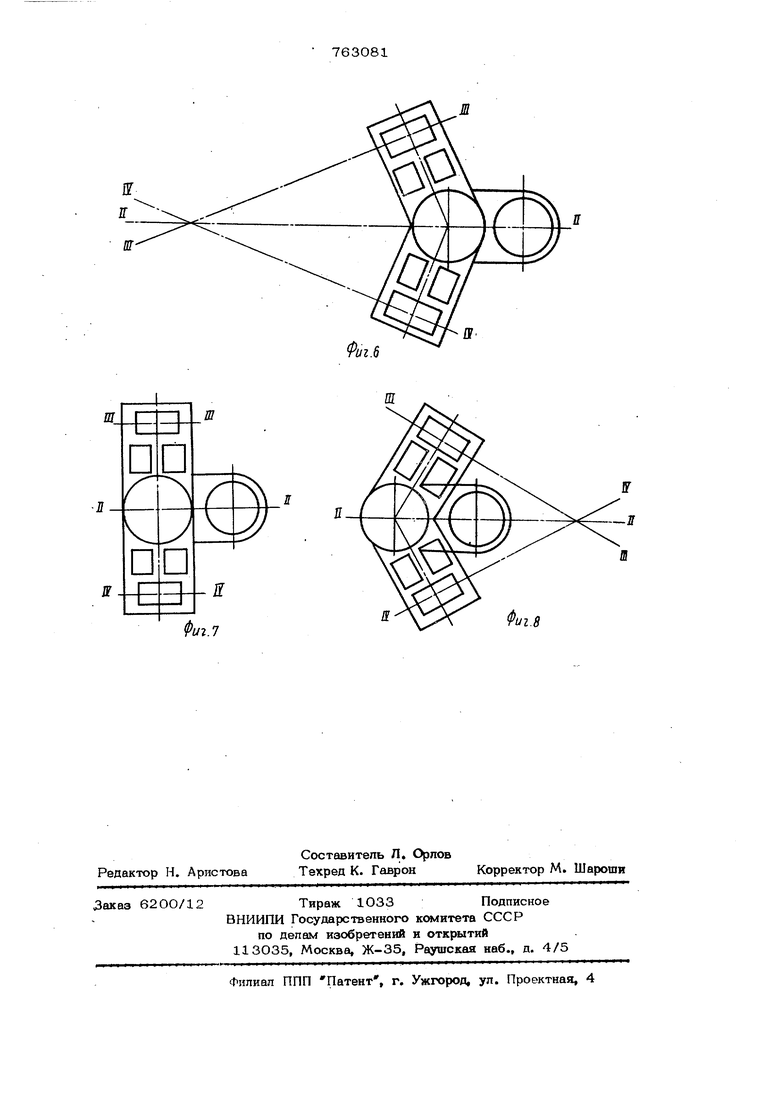
Сжатый воздух из воздухораспределителя, находящегося в блоке подготовки и распределения воздуха (на фигурах не показан), поступает через штуцер 36 в полость 2 моментного пневмоцилиндра, образованного корпусом 1, 4 и опорой 5, и приводит в движение вокруг оси 1-1 ротор 2 О, соединенный с осью 19, на фланце которой с помощью крышки 23 и кольцевых проточек 18 и 24 крепятся кронштейны 21 к 22 для крепления двух грузозахватных устройств в одном из следующих трех основных положений: когда оси Ill-Ill и 1У-1У пересекают ось И-11 впереди модуля (см. фиг. 6), когда оси 1П-М1 и 1У-1У параллельны оси И-П (см. фиг. 7), когда оси UUIU и 1У-ТУ пересекают ось П-И позади модуля (см. фиг. 8). Фпажок 11 конечного упора 7, зафиксин рованного Б необходимом месте стопором 9, входит в прорезь головки бесконтактного датчика 14, закрепленного с помощью кронштейна 13 на рычаге 12. В результате этого появляется сирнап о выполнении движения, который, осуществляя обратную связь, поступает в программное устройство (на фигурах не показано).
Демпферы 15 и 16, закрепленные на кронштейне 17, соединенном с флажком оси 19 с помощью качающегося вокруг оси У-У рычага 12, исключают жесткий удар в конце хода при повороте вокруг оси I-I.
Аналогичный результат получается при повороте вокруг оси в противоположную сторону, когда сжатый воздух
через штуцер 37 поступает в полость 3 пнетмошшиндра, а флажок 1О конечного 6, зафиксированного стопором 8, входит в прорезь головки бес контактного датчика 14, сигнал о выполнении движения с которого также поступает в программное устройство.
Промежуточные одна или две останов ки при повороте BOKfyr оси I-I осуществляются с помощью управляетдых промежуточных упоров 26 и 27, работающих автономно, корпусы 30 и 31 которых смонтированы на кольцах 32 и 33, имеющих независимое друг от друга перемещение вокруг корпуса 1, обеспечивак щих размещение промежуточных упоров 26 и 27 в заданных точках рабочей зоны. После установки упоров 26 vi 27 кольца 32 и 33 фиксируются стопорами 34 и 35. Остановка грузозахватных
устройств в заданной точке обеспечивается конструкцией упоров 26 и 27, и не зависит от направления поворота вокруг оси I-I. & 1Движение упоров 26 и 27 осуществляется сжатым воздухом
в соответствии заданной программе, который поступает через штуцер 38 в корпус 31, выдвигая упор 27, флажок 29 которого поднимается на уровень входа в прорезь головки бесконтактного
датчика 14 . При повороте вокруг оси Г-Т рычаг 12 доходит до упора 27, флажок 29 которого входит в прорезь голедаки датчика 14. В результате появляется сигнал о выполнений движения,
поступающий в программное устройство.
Аналогичный процесс происходит, когда сжатый воздух через штуцер 39 поступает в корпус 30, выдвигая упор 26, флажок 28 которого поднимается на уровень входа в прорезь головки бесконтактного датчика 14.
Работа модуля с одним грузозахват ным устройством, закрепленном в приспособлении 25 (см. фиг. 4), аналогична работе модуля с двумя грузозахватными устройствами.
Формула изобретения
Механизм поворота манипулятора, содержащий привод, неподвижное основание с конечньгми и промежуточными упорами и поворотную плиту с устройством для крепления грузозахватных элементов и рычагом, взаимодействующим с упорами, отличающийся тем, что, с целью расширения технологических возможностей, он снабжен дополнительным промежуточным упором и копьцак1И, установленными с возможностью незав1гсимого поворота и фиксации относительно друг друга на неподвижном основании, причем на одном из колец закреплен дополн1ггельный промежуточный упор).
Источники информашш, принятые во внимание при экспертизе.
f2
25
Фиг.1
