315
Изобретение относится к машиностроению, преимущественно к робототехнике, и предназначено для автоматизации производственных процессов,
Цель изобретения - повышение надежности и точности позиционирования за счет улучшения динамлмес-ких характеристик.
На фиг. 1 изображен промышленный робот, общий вид; на фиг. 2 - вид А на фиг. 1; на фиг. 3 разрез Б-Б на фиг. 1; на фиг. k - разрез В-В на фиг. 1; на фиг, 5 - вид Г на фиг. 3.
Промышленный робот содержит основание 1 с жестко закрепленной на нем колонной 2 и привод поворота, включающий пневмодвигатель. К пневмодвигате- лю 3 закреплен диск Ц, на котором закреплены кронштейны 5 с установленными на них датчиками 6. Внутри колонны 2 установлен с помощью подшипников 7 вертикальный вал 8. Сверху на вертикальном валу 8 крепится кронштейн Э, на котором шарнирно установлена квад- ратного сечения труба 11) с роликовыми
направляющими 11. Внутри трубы 10 размещена пустотелая квадратного сечения механическая рука 12, на торцовой поверхности которой закреплен механизм поворота кисти 13 и два модуля сдвига схватов 14, со схватами lij. На кронштейне 9 закреплен также привод подъема механической руки 12, включающий пиевмоцилиндр 16. Внизу вертикальный |вал 8 соединен при помощи муфты 17с ралом пневмодвигателя 3. На нижней (части вертикального вала 8 закрепле- f-ю при помощи эвольвентного шлицево- to соединения кольцо 18, Для обеспечения гарантированного неподвижного соединения кольцо 18 дополнительно закрепляется болтом 19 и контрится гайкой 2Q, На наружной поверхности кояьп, ца 18 имеются расположенные под уг- Лом относительно оси вращения кольца выступы, сопрягаемые с выступами регулируемых упоров 21 и 22, а также имеется кольцевая проточка для установки регулируемых упоров, Промежуточные регулируемые упоры 21 и конечные регулируемые упоры 22, а также флажок 23 закреплены на кольце 18 При помощи болтов 2k и квадратных га- «к 25, размещенных в кольцевой про- Сочке. Количество промежуточных регу /Ыруемых упоров 21 может быть до шести. К верхней части основания 1 закреплена направляющая 26, по которой
,
,
JQ
is 2025
п5, 5
50
55
перемещается каретка 27 тормозного устройства. Ход каретки 27 ограничен двумя демпферами 28, закрепленными неподвижно на кронштейнах 29. На каретке 27 закреплены направляющие 30, по которым перемещается выдвижной упор 31 с роликом 32. Выдвижной упор 31 соединен со штоком пневмоцилиндра 33, который закреплен на каретке 27. На каждом кронштейне 29 закреплено по одному бесконтактному датчику 3 положения каретки 27«
Промышленный робот работает следующим образом.
По заданной программе от стойки управления пневмодвигатель 3 при помощи муфты Г/ поворачивает вертикальный вал 8. Вместе с вертикальным валом 8 Поворачивается механическая рука 12 и кольцо 18 с закрепленными на нем регулируемыми упорами 21 и 22 и флажком 23. В момент прохождения флажка 23 мимо задействованного со стойкой управления бесконтактным датчиком 6 по команде от стойки управления срабатывает пневмоцилиндр 33 выдвижного упора 31. Выдвижной упор 31 перемещается по направляющим 30 в крайнее положение, в сторону вертикального вала 8. Вращение вертикального вала 8 с
кольцом 18 происходит до тех пор, пока регулируемый упор 21 не встретит
ролик 32 выдвижного упора 31, после чего регулируемый упор 21, нажимая на ролик 32, перемещает каретку 27 по направляющей 26 основания из среднего положения в крайнее положение, в сторону гидродемпфера 28. При помощи гидродемпфера 28 происходит торможение и остановка вертикального вала 8. Для дальнейшего движения вертикального вала 8 я том же направление, вначале; для предотвращения резкого поворота вертикального вала 8 при убранном выдвижном упоре 31, по команде от стойки управления при помощи пнев- мораспределителя, на короткое время (примерно на 0,1 с) создается противодавление в пневмодвигателе 3. Затем выдвижной упор 3 при помощи пневмоцилиндра 33 перемещается в сторону от вертикального вала 8. Каретка 27 при помощи штоков демпферов 28 возвращается в среднее положение. После подается сигнал из стойки управления и сжатый воздух поступает в пнеамо- двигатель 3 который плавно поворачивает вертикальный аал 8 в сторону,
заданную программой. При достижении заданного углового положения по сигналу от бесконтактного датчика 6 при помощи пневмоцилиндра 33 выдвигается выдвижной упор 31 с роликом 32 и попадает на упор регулируемый 21 или 22. В результате каретка 27 перемещается в крайнее положение до упора в демпфер 28 и происходит плавная ос- тановка вертикального вала 8. Сигнал о достижении необходимого углового положения вертикального вала 8 и окончании поворота подает один из бесконтактных датчиков 6, кроме того, сиг- нал об окончании поворота подается от бесконтактных датчиков 3 установленных на кронштейнах 29.
Для поворота вертикального вала 8 в противоположном направлении до ближайшего промежуточного регулируемого упора 21 выдвижной упор 31 остается в выдвинутом положении. Для повышения надежности робота и удобства работы его в наладочном режиме край- ние два регулировочных упора 22 отличаются от регулировочных упоров 21 тем, что они длиннее, поэтому остановка вращения вертикального вала 8 при помощи регулировочных упоров 22 мо- жет осуществляться как при выдвинутом упоре 31 так и при невыдвинутом.
Грубая регулировка регулировочных упоров 21 и 22 достигается перестановкой их вправо или влево, вдоль коль- цевой проточки кольца 18, а тонкая регулировка перемещением их вдоль выступов, выполненных на наружной поверхности кольца 18, расположенных под углом относительно оси вращения кольца 18. Жесткая фиксация регулировочных упоров 21 и 22 достигается затяжкой болтов 2k.
Подъем и опускание механической руки 12 осуществляется при помощи пневмоцилиндра 16. Выдвижение механической руки 12 достигается приводом выдвижения (не показан). Поворот кис ти осуществляется модулем поворота
кисти 13, а сдвиг схватов 15 двумя модулями сдвига 14.
Формула изобретений
1. Промышленный робот, содержащий основание, вертикальный вал с устаноленной на нем механической рукой, привод ее поворота, выполненный в шиде пневмодвигатзля, и приводы подъема и выдвижения механической руки,а также систему управления, тормозное устройство механической руки и регулируемые упоры, отличающийся тем, что, с целью повышения точности позиционирования и повышения надежности за счет улучшения динамически;; характеристик, он снабжен кольцом с флажком, установленным на вертикальном валу, диском с датчиками положения, закрепленным на пневмодвигателе привода поворота, и направляющими, смонтированными на основании, причем тормозное устройство механической руки выполнено в виде демпферов, размещенных на кронштейнах, смонтированных на основании, каретки, установленной на направляющих основания с возможностью поочередного взаимодействия с демпферами, и выдвижного укора, установленного с возможностью взаимодействия с регулируемыми упорами, закрепленными на кольце.
2.Робот поп. 1, отличающийся тем, что кольцо сряоа о с валом посредством эвольвентного ипице вого соединения, а на наружной поверхности кольца выполнены кольцевая проточка для установки упоров и вкс #пы, расположенные под углом к оси зрзще- ния кольца, причем на регулируемы,, упорах выполнены выступы, преднагна- ченные для взаимодействия с выступами кольца.
3.Робот по п. 1, о т л и ч a щ и и с Р тем, что он снабжен ками положения каретки, установ ек ными на кронштейнах демпферов.
tud
Ы
Л 33 17 3t 31 М 29 28 1 I II I
UJ4
л
«HZZX-l ZIJ
Фт.§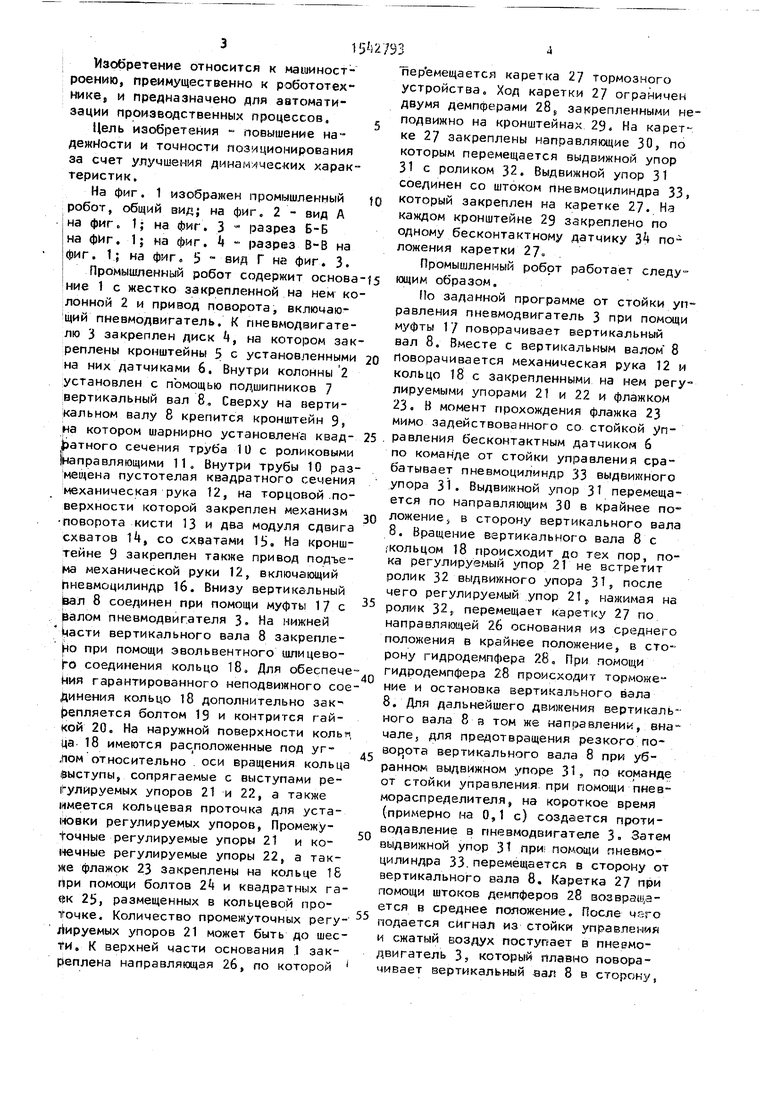
| название | год | авторы | номер документа |
|---|---|---|---|
| Промышленный робот | 1983 |
|
SU1127765A1 |
| Устройство для перегрузки конусов электронно-лучевых трубок с транспортера печи отжига | 1990 |
|
SU1839168A1 |
| Механизм поворота манипулятора | 1978 |
|
SU763081A1 |
| Промышленный робот | 1977 |
|
SU808262A1 |
| МОДУЛЬ МАНИПУЛЯТОРА | 1991 |
|
RU2028928C1 |
| Установка для изготовления биметаллических деталей | 1982 |
|
SU1069941A1 |
| Манипулятор для дозированной загрузки емкости сыпучим материалом | 1985 |
|
SU1281399A1 |
| Промышленный робот | 1980 |
|
SU965761A1 |
| Промышленный робот | 1979 |
|
SU908242A3 |
| Манипулятор | 1980 |
|
SU908588A1 |
Изобретение относится к машиностроению, а именно к робототехнике, и предназначено для автоматизации производственных процессов. Цель изобретения - повышение точности позиционирования и повышение надежности за счет улучшения динамических характеристик. На вертикальном валу 8 установлено кольцо 18 с флажком 23 и регулируемыми упорами 21 и 22 на наружной поверхности кольца 18. При этом выполнены кольцевая проточка для установки регулируемых упоров 21 и 22 и выступы под углом к оси вращения кольца, предназначенные для взаимодействия с выступами регулируемых упоров 21 и 22, обеспечивающие точную установку последних. Для плавного останова вертикального вала 8 предусмотрено тормозное устройство в виде каретки 27, установленной на направляющих 26 основания 1 с возможностью взаимодействия с демпферами и несущей выдвижной упор 31, предназначенный для взаимодействия с регулируемыми упорами 22 кольца 18. 2 з.п. ф-лы, 5 ил.
| Походная разборная печь для варки пищи и печения хлеба | 1920 |
|
SU11A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
