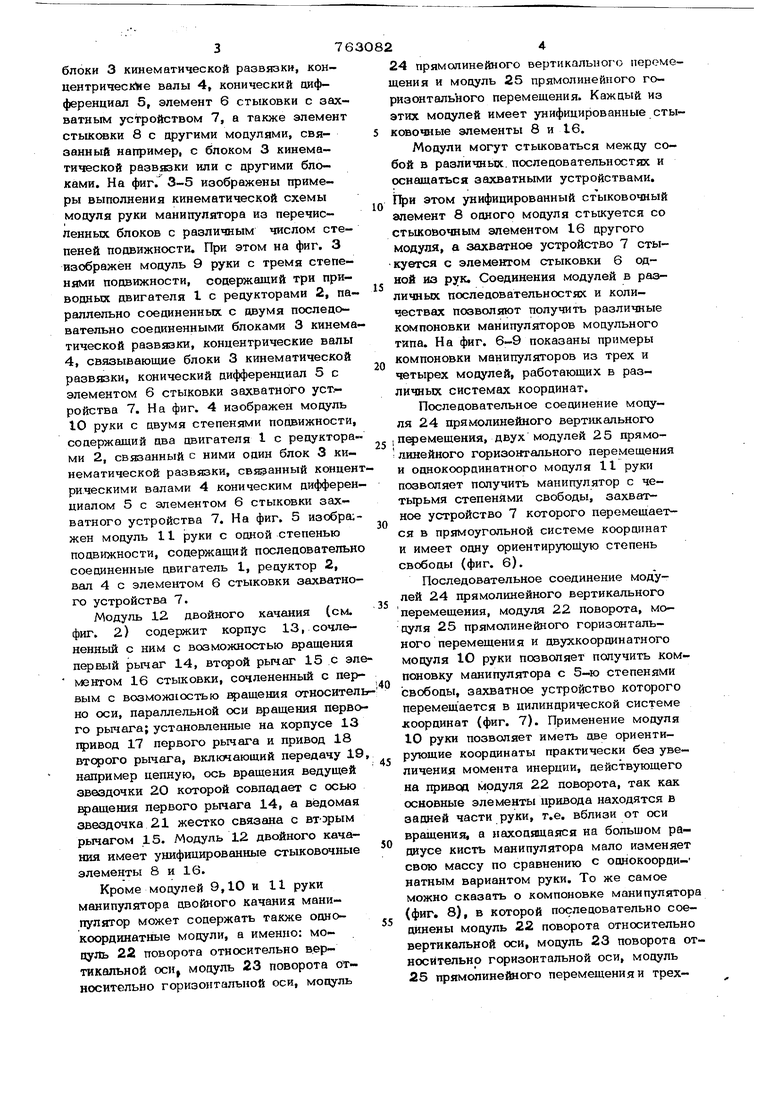
Изобретение относится к манипулятофам и может быть использовано в различных областях техники. Известны манипуляторы модульного типа ij , содержащие захватное устройс во и, по крайней мере один одкокоорцина ный модуль поворотного или прямолинейного перемещения, имеющий стыковоч ные элементы, позволяющие соединять модули друг с другом последовательно в любом порядке и количестве. Недостатком известных устройств является то, что каждый модуль обеспечивает перемещение звеньев манипулатора по одной координате, а последовательное соеданение однокоординатных модулей увеличивает вес кояструкции и снижает технологические возможности мaнипyлJггqpa в цепом. С целью расширения технологических возможностей манипулятор снабжен модулями с числом координат перемещений более одной, с независимыми приводами по каждой координате. Кроме того, он может быть снабжен дополнительным модулем - модулем руки, выполненным в виде сборки из кc«cт руктивных блоксе, а также снабжен модулем двойного качания, содержащим корпус, сочлененные с ним с возможностью вращения первый и второй рычаги, последних из которых соединен с первым с возможностью вращения относительно оси параллельной оси вращения первого рычага, и установленные на корпусе привода этих рычагов. На фиг. I показан модуль фиг. 2 - модуль двойного качания;;1на фиг. 3 - пример выполнения кинематической схемы подвижности; Jна фиг. 4 - то же, с двумя степенями подвижности; на фиг. то же, с одной степенью nofbЬижности{ на фиг. 6-9 - варианты компонсюок манипулятора модульного типа. Манипулятор модульного типа содержи ряд модулей. Модуль руки (см. фиг. 1) содержит приводные двигатели I с редукторами 2, блоки 3 кинематической развязки, концентрическ е валы 4, конический дифференциал 5, элемент 6 стыковки с захватным устройством 7, а также элемент стьжсизки 8 с другими модулями, связанный например, с блоком 3 кинематической развязки или с другими блоками. На фиг. 3-5 изображены примеры выполнения кинематической схемы модуля руки манипулятора из перечисленных блоков с различным числом степеней подвижности. При этом на фиг. 3 изображен модуль 9 руки с тремя степенями подвижности, содержащий три приводных двигателя I с редукторами 2, па раллельно соединенных с двумя последовательно соединенными блоками 3 кинема тической развявки, концентрические валы 4, связывающие блоки 3 кинематической развявки, конический дифференциал 5 с элементом 6 стыковки захватного уст.ройства 7. На фиг, 4 изображен модуль 10 руки с двумя степенями подвижности, содержащий два двигателя 1 с редуктора ми 2, связанный с ними один блок 3 кинематической развязки, связанный концен рическими валами 4 коническим дифферен циалом 5 с элементом 6 стыковки захватного устройства 7. На фиг. 5 изобра жен модуль 11 руки с одной степенью подвижности, содержащий последовательн соединенные двигатель 1, редуктор 2, вал 4 с элементом б стыковки захватного устройства 7. Модуль 12, двойного качания (см. фиг. 2) содержит корпус 13, сочлененный с ним с возможностью вращения первый рычаг 14, втфой рычаг 15 с эл ментом 16 стыковки, сочлененный с первым с возможностью ращения относител но оси, параллельной оси вращения перво го рычага; установленные на корпусе 13 гЧривод 17 первого рьиага и привод 18 второго рычага, включающий передачу 19 например цепную, ось вращения ведущей звездочки 20 которой совпадает с осью ращения первого рычага 14, а ведомая звездочка 21 жестко связана с вторым рычагом 15. Модуль 12 двойного качания имеет унифицированные стыковочные элементы 8 и 16. Кроме модулей 9,10 и 11 руки манипулятора двойного качания манипулятор может содержать также однокоординатные модули, а именно: модуль 22 поворота относительно вертикальной оси, модуль 23 поворота относительно горизонтальной оси, модуль 24прямолинейного вертикального перемещения и модуль 25 прямолинейного горизонтального перемещения. Каждый из этих модулей имеет унифицированные стыковочные элементы 8 и 16. Модули могут стыковаться между собой в различньвс. последовательностях и оснащаться захватными устройствами. При этом унифицированный стыковочный элемент 8 одного модуля стыкуется со стыковочным элементом 16 другого модуля, а захватное устройство 7 стыкуется с элементом стыковки 6 одной из рук. Соединения модулей в различных последовательностях и количествах позволяют получить различные компоновки манипуляторов модульного типа. На фиг. 6-9 показаны примеры компоновки манипуляторов из трех и четырех модулей, работающих в различных системах координат. Последовательное соединение модуля 24 прямолинейного вертикального п емещения, двух модулей 25 прямолинейного горизонтального перемещения и однокоординатного модуля 11 руки позволяет получить манипулятор с четырьмя степенями свободы, захватное устройство 7 которого перемещается в прямоугольной системе координат и имеет одну ориентирующую степень свободы (фиг. 6). Последовательное соединение модулей 24 прямолинейного вертикального перемещения, модуля 22 поворота, модуля 25 прямолинейного горизонтального перемещения и двухкоординатного модуля Ю руки позволяет получить компоновку манипулятора с 5-ю степенями свободы, захватное устройство которого перемещается в цилиндрической системе координат (фиг. 7). Применение модуля 10 руки позволяет иметь две ориентирующие координаты практически без увеличения момента инерции, действующего на привод мрдуля 22 поворота, так как основные элементы привода находятся в задней части руки, т.е. вблизи от оси вращения, а находящаяся на большом радиусе кисть манипулятора мало изменяет свою массу по сравнению с однокоординатным вариантом руки. То же самое можно сказать о компоновке манипулятора (фиг. 8), в которой последовательно соединены модуль 22 поворота относительно вертикальной оси, модуль 23 поворота относительно горизонтальной оси, модуль 25прямолинейного перемещения и трех.5 координатный модуль 9 руки. В результате получена компоновка манипулятора с шестью степенями свободы, захватHOQ устройство которого перемешается в .сфе{№ ческой системе координат и имее возмомшость универсального ориентирования относительно трех взаимно перпендикулярных осей. В этом манипуляторе масса кисти практически равна мас се кисти с двух координатным модулем 10 и поэтому моменты инерции, действу щие на приводы модулей 22 и 23, измеН51ЮТСЯ мало, и, таким образом, динамические качества манипулятора с универсальной ориентирующей способностью пра тически не отличаются от динамических качеств манипуляторов с одной ориен-у тирующей степенью свободьи На фиг. 9 показана компоновка манипулятора модульного типа, полученная последовательным соединением трех модулей: модуля 22 поворота, модуля 12 двойного качания и трехкоординатного модуля 9 руки. Манипулятор, также как и пре1дыдущий, имеет шесть степеней свободы и универсальную ориентирующую способ ность, но в отличие от него не имеет в своем составе механизмов прямолинейного перемещения, что позволяет создать более компактную и, следовательно, более динамическую конструкцию. При этом модуль 9 руки манипупянтора, жестко связанный с вторым рычагом 15 модуля двойного качания, сох раняет возможность поступательного движения, которое осуществляется при работ привода 17 первого рычага 14, в то вре мя, когда привод 18 второго рычага 15 заторможен. При этом второй рычаг 15 t 2J 82 перемоцаясь вместе с первым рычагом 14, не меняет своей ориентации бленгодаря наличию передачи 19, так как происходит поступательное перемещение модуля 9 руки и захватного устройства 7 манипуляггора. Формула изобретения I. Манипулятор модульного типа, содержащий захватное устройство и, по крайней мере, один однокоординатный модуль поворотного или 1ФЯМОлинейного перемещения имеющий стыксжочные эле менты, отличаю, щи йс я тем, что, с целью расширения технологичес- их возможностей, он снабжен модулями с числом координат перемещений более одной, с независимыки приводами по каждой координате. 2.Манипулятор по п. 1, отличающийся тем, что, он снабжен дополнительным модулем - модулем рукн, вьшолненным в виде сборки из конструктивных блоков. 3.Манипулятор по п. 1, отличающийся тем, что, он снабжен модулем двойного качания, содержащим корпус, сочлененные с ним с - возможностью ращения первый и второй рычаги, последний из которых соединен с первым с возможностью ращения относительно оси, параллельной оси вращения первого рычага, и установленные на корпусе привода этих рычагов. Источники ннфор мации, принятые во внимагше при экспертизе 1. Патент ФРГ № 23О1423, кл. В 25 Т З/ОО, опублЛс. 1974.
/7./
W
2i 15
Ul.

| название | год | авторы | номер документа |
|---|---|---|---|
| Манупулятор | 1973 |
|
SU446412A1 |
| Шарнир манипулятора | 1982 |
|
SU1057274A1 |
| Манипулятор модульного типа | 1983 |
|
SU1093538A1 |
| Способ и система для определения по меньшей мере одного свойства манипулятора | 2014 |
|
RU2672654C2 |
| Модуль манипулятора | 1980 |
|
SU984859A1 |
| Модульный манипулятор | 1980 |
|
SU952578A1 |
| МЕДИЦИНСКАЯ РОБОТИЗИРОВАННАЯ СИСТЕМА | 2007 |
|
RU2412799C2 |
| РОБОТИЗИРОВАННАЯ ХИРУРГИЧЕСКАЯ СИСТЕМА ДЛЯ ВЫПОЛНЕНИЯ МИНИМАЛЬНЫХ ИНВАЗИВНЫХ ВМЕШАТЕЛЬСТВ | 2007 |
|
RU2412800C2 |
| Манипулятор модульного типа | 1983 |
|
SU1252162A1 |
| СКЛАДЫВАЮЩИЙСЯ ШАРНИРНЫЙ МАНИПУЛЯТОР | 2021 |
|
RU2765030C1 |



Ti
laI-J-
f7///7/
Ж
U2.d
