;о
00
ел
со
00
Изобретение относится к роботостроению и может быть испольэбвано для точного перемещения рабочего органа при выполнениии сложных сборочных и других работ.
Известен манипулятор модульного типа, содержащий захватное устройств и модули, имеющие основание, размещенный на нем корпус, рычаги, приводы, установленные на основании и стыковочные элементы Cll.
Недостатком известного устройства являются низкие технологические возможности вследствие погрешностей в шарнирах и низкой точности позиционирования. .
Целью изобретения является расширение технологических возможностей манипулятора.
Поставленная цель достигается тем, что в манипуляторе модульного
,типа, содержащем захватное устройст во и модули, имеющие основание, раз мещенный на нем корпус, рычаги, приводы, установленные на основании, и стыковочные элементы, каждый модуль снабжен шарниром, установленным на основании, тормозными элементами осевого перемещения и поворота, расположенными в шарнире, и датчиками положения, один из которых ,расположен в корпусе, а другие - на основаНИИ, при этом один конец рычага размещен в шарнире с возможностью взаимодействия с тормозными элементами .и датчиком положения, расположенным в корпусе, а другой конец рычага кинематически связан с приводами и с возможностью постоянного контактирования с одним или всеми датчиками положения,расположенными на основании, при этом на тормозных элементах установлены тензодатчики.,
Датчики положения выполнены в виде плоских пружин, на которых установлены тёНзбдЭТЧИки.
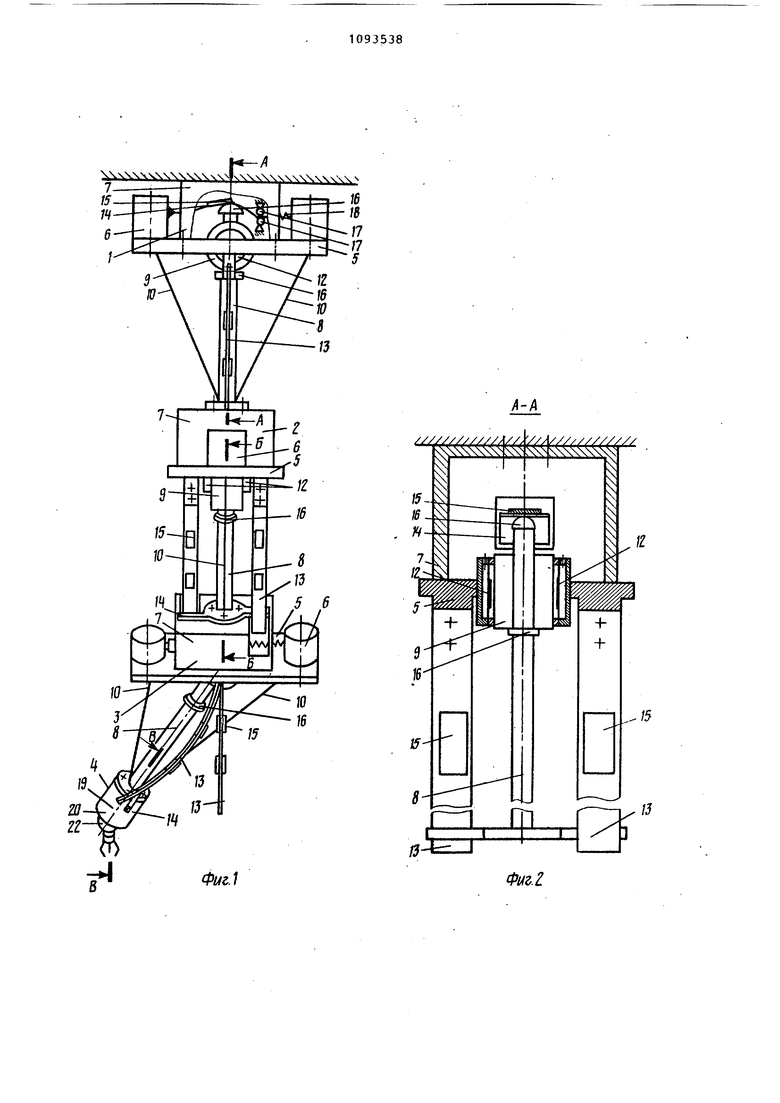
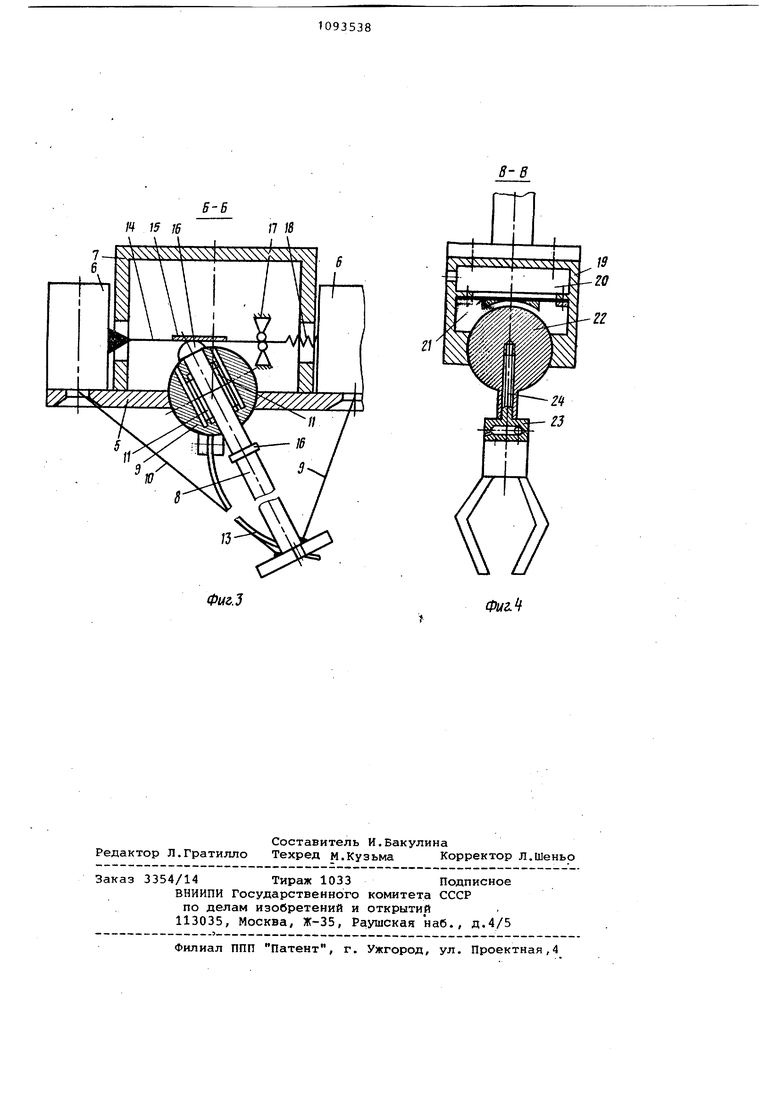
На фиг. 1 изображен манипулятор модульного типа, общий вид; на фиг. 2 - сечение А-А на фиг. 1; на фиг. 3 - сечение Б-Б на фиг. 1; на фиг. 4 - сечение В-В на фиг. 1.
Манипулятор модульного типа содер жит последовательно соединенные модули 1 - 3 и виброгравитационную головку 4, к которой присоединяется за1хватное устройство. Каждый модуль состоит из основания 5, двух приводов б, корпуса 7 и рычага 8. ОДин конец рычага 8 расположен в отверстии шарнира 9, установленного на основании, имеющем соединительные фланцы. Другой конец рычага 8 кинематически, например, с помощью тросов 10 соединен с приводами бис помощью соединительного фланца соединен с последующим модулем, бнутри шарнира, 9, который может совершать поворот в йлоскости приводов,установлены
тормозные элементы 11 осевого перемещения рычага, например, мембранного типа, а .со стороны торцов его закреплены тормозные элементы 12 поворота, например, мембранного типа. Датчики 13 и 14 положения выполнены в виде плоских пружин с расположенными на них тензометрическими датчиками 15.
Плоские пружины 13 закреплены на основании таким образом, что с концом рычага постоянно контактирует либо одна из них, либо обе. Конец рь1чага 8, расположенный в отверстии шарнира, имеет ограничители 16 осевого перемещения и контактирует с плоской пружиной 14, расположенной в корпусе 7 перпендикулярно рычагу 8. Один конец плоской пружины 14 закреплен, а другой установлен между направляющими 17 и предварительно подтянут пружиной 18. Виброгравитационная головка 19 состоит из мембранной коробки 20, мембраны-тормоза 21, шарнира 22, вибратора 23 и упругой подвески 24, за счет которой можно изменять расстояние между шарниром и вибратором, а соответственно и жесткость подвески.
Манипулятор работает следуюшим Образом.
За исходное положение принимается расположение рычага 8 перпендикуляр
но основанию 5, при этом приводы б отключены, а мембраны тормозных элементов 11. и 12 находятся под давлением и контактируют с шарниром 9. Допустим, необходимо выйти концом рычага 8в какую-либо точку, тогда движение рычага 8 происходит при поступлении на соответствующие приводы б сигналов рассогласования. Сигналы рассогласования представляют собой разность управляющих сигналов и сигналов обратных, связей, снимаемых с тензометрических датчиков 15.. Движение происходит до тех пор, пока сигналы тензометрических датчиков 15 не станут равны запрограммированным.
Допустим, надо выйти концом рь1чага 8 в какую-либо точку, находящуюся с левой стороны и смещенную от начальной дуги вращения конца рычага вверх. Для этого отключаются тормозные элементы 11 и запитываются приводы б, которые связаны с концом рычага через тросы 10. Рычаг 8 начинает перемещаться в осевом направлении до тех пор, пока конец рычага не переместится на величину смещения заданной точки от начальной дуги вращения. При выходе конца рычага на новую дугу вращения запитываются тормозные элементы 11 осевого перемещения и отключаются тормозные элементы 12 поворота, а также правый привод 6. При этом рычаг 8 начинает вращатьбя в левую сторону, пока его конец не совпадет с заданной точкой Как толькр конец рычага совпадет с заданной точкой, эапитываются тормозные, элементы 12 поворота и отключается левый привод 6. Количес во модулей манипулятора и их стыков ка (в одной плоскости или во взаимно перпендикулярных плоскостях) выбирается в зависимости от заданного технологического проиесса, причем iнеобходимая траектория задается путем выведения конца манипулятора в заданные точки, координаты которы запоминаются системой управления. В зависимости от технологического процесса стыковка модулей производится с возможностью поворота рычагов 8 в одной плоскости, либо во взаимно перпендикулярных плоскос тях. Последний модуль содержит виброгравитационную головку, с которой могут стыковаться различные захватные устройства. Подвод рабо ей среды, например, воздуха осуществляется, например, при помощи электропневмоклапана через пневмотрубку (.не показаны J к отверстию верхней полости мембранной коробки 20. Необходимость подачи или отключения подачи рабочей среды в верхнюю полость мембранной коробки виброгравитационной головки характеризуется тем или иным технологическим процессом. Так, например, при повороте рычагов 8 захватное устройство, закрепленное на упругой подвеске 24, связанной с шарниром 22, может сохранять перпендикулярно направление к плоскости закрепления манипулятора под действием гравита-ционной силы. В этом случае рабочая среда в мембранную коробку не подается, а подается только тогда, когда надо жестко зафиксировать захватное устройство. Если необходимо зафиксировать захватное устройство по одной оси с последним «рычагом 8,. то в исходном положении в мембранную коробку подается рабочая среда, взаимодействующая с мембраной-тормозом 21, который прижимает шарнир 22. Если необходимо зафиксировать захватное устройство на определенный угол по отношению к последнему рычагу манипулятора, то этот рычаг поворачивается в нужную сторону (влево или вправо- на этот угол, причем рабочая среда в мембранную коробку не подается, затем, когда рычаг повернулся на заданный угол, подается рабочая среда в мембранную коробку (т.е. фиксируется схват . После этого рычаг возвращается в исходное положение. Величина сканирования регулируется изменением длины упругой подвески. При ввинчивании жесткость уменьшается, при отвинчивании - увеличивается. Использование предложенного манипулятора модульного типа позволяет расширить технологические возможности за счет того, что рычаги имеют не только угловое перемещение, а также и осевое, а тормозные элементы и датчики положения выполнены непосредственно в модулях.
Фиг,.}
у4-Д
////////////Л//)(//.
Фиг.г
ВВ
14 15 J6/7 18
f V V Д - f IMI |V
| название | год | авторы | номер документа |
|---|---|---|---|
| Звено-модуль руки манипулятора | 1984 |
|
SU1194668A1 |
| Модуль манипулятора | 1980 |
|
SU984859A1 |
| Манипулятор модульного типа | 1977 |
|
SU763082A1 |
| Захватное устройство | 1985 |
|
SU1335452A1 |
| УСТРОЙСТВО ДЛЯ ФОРМОВАНИЯ БЕТОННЫХ ИЗДЕЛИЙ | 2009 |
|
RU2405672C1 |
| РОБОТ, ВЫПОЛНЕННЫЙ С ИСПОЛЬЗОВАНИЕМ ПРИНЦИПА ПАРАЛЛЕЛОГРАММА | 2016 |
|
RU2663510C2 |
| Манипуляционная система | 1990 |
|
SU1784451A1 |
| ИЗМЕРИТЕЛЬНАЯ ВСТАВКА | 2011 |
|
RU2458326C1 |
| Манипулятор модульного типа | 1979 |
|
SU1038220A1 |
| Модуль манипулятора | 1987 |
|
SU1579769A1 |
1. МАНИПУЛЯТОР МОДУЛЬНОГО ТИПА, содержащий захватное устройство и модули, имеющие основание, размещенный на нем корпус, рычаги, приводы, установленные на основании, и стыковочные элементы, отличающийся тем, что, с целью расширения технологических возможностей, каждый модуль снабжен шарниром, установленным на основании тормозными элементами осевого перемещения и поворота, расположенными в шарнире, и датчиками положения, один из которых расположен в корпусе, а другие на основании, при этом один конец рычага размещен в шарнире с возможностью взаимодействия с тормозными элементами и датчиком положения, расположенным в корпусе, а другой конец рычага кинематически связан с приводами и с возможностью постоянного контактирования с одним или всеми датчиками положения, расположенными на основании. 2. Манипулятор по п. 1, о т л ичающийся тем, что датчики положения выполнены в виде плоских «Л пружин, на которых установлены тензо-j метрические датчики. с
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Манипулятор модульного типа | 1977 |
|
SU763082A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
