Изобретение относится к машиностро.ению, а именно к промЕэ1Шленным работам.
Известен модульный ман,ипулятор, содержащий основание, механизм статического уравновешивания звеньев манипулятора, а также захватное устройство и набор поступат1ельных и .вращательных модулей степей подвижности, соединенных между собой унифицированными крепежными элементами Lll .
Недостатком известного модульного манипулятора является сложность -конструкции модуля подъема.
Целью изобретения является упроще ние конструкции.
Эта цель достигается тем, что основание выполнено в виде модульных плиты, упорной рамки и полиспаст- - ного устройства, а механ IM уравноёешивания - в виде набора модулейуравновешивателей, установленных на плите основания и связанных концами своими с Упорной рамкой.
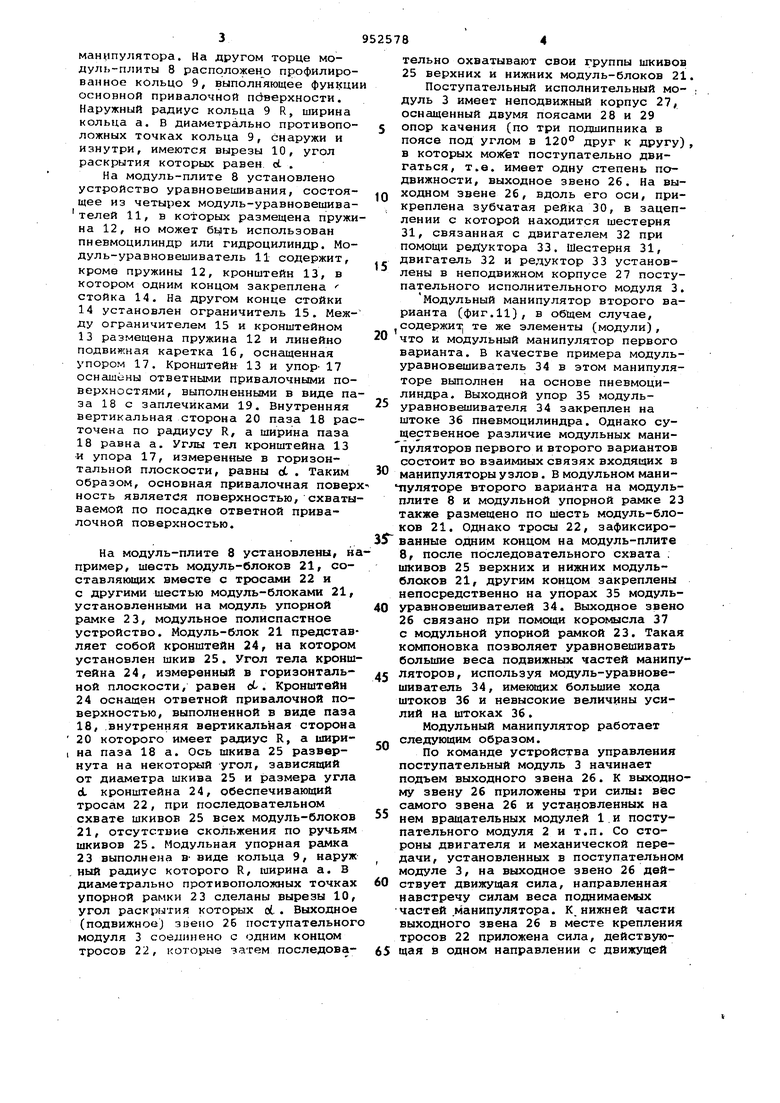
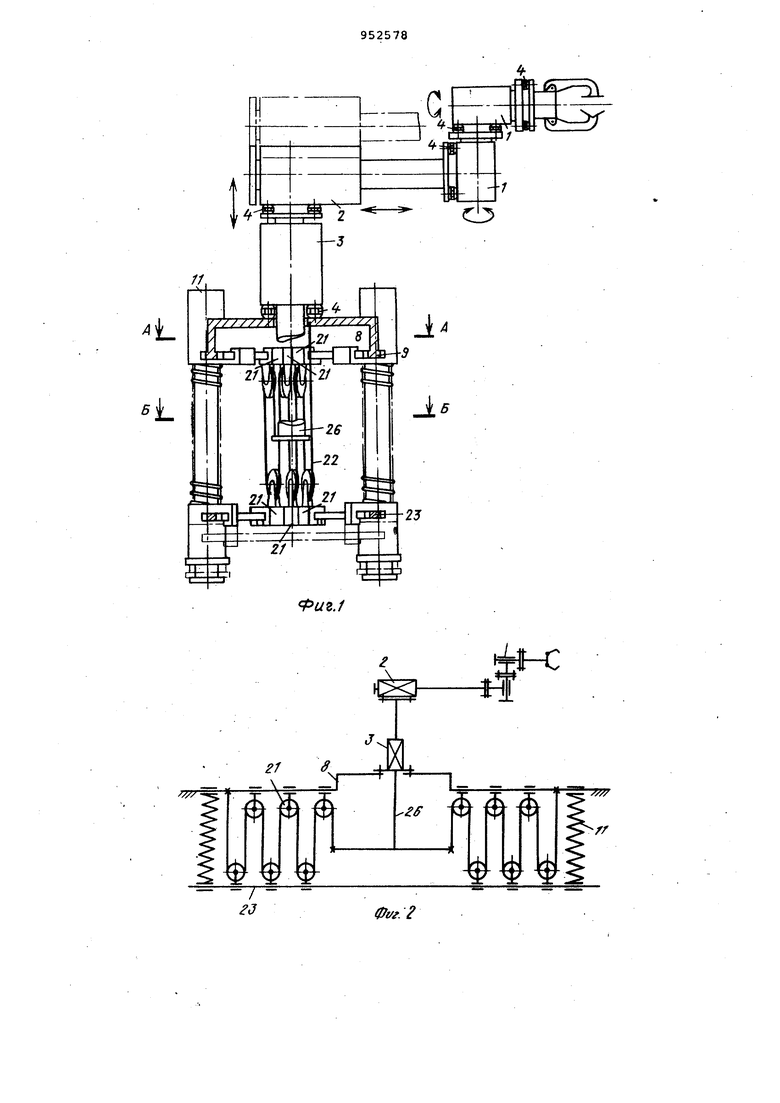
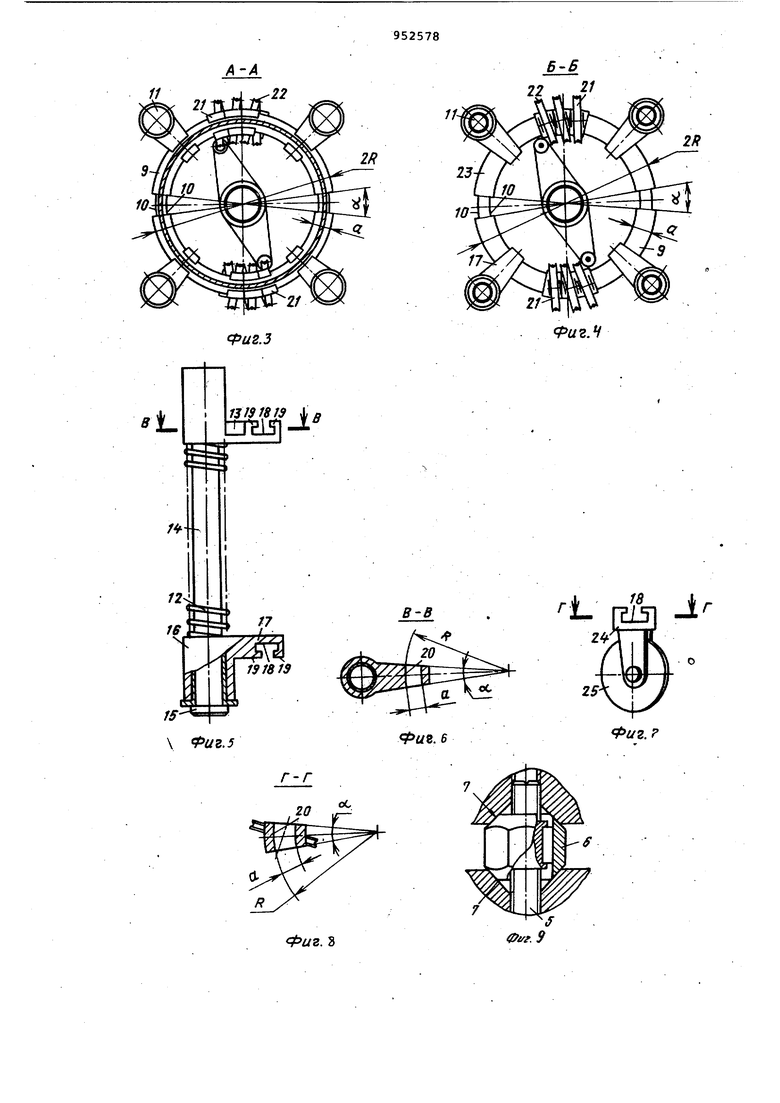
На фиг. 1 изображен модульный ма-, нипулятор первого варианта; на фиг. 2 - то же, кинематическая схема; на фиг. 3 - разрез А-А на фиг. 1; на фиг. 4- - разрез Б-В на фиг. 1;
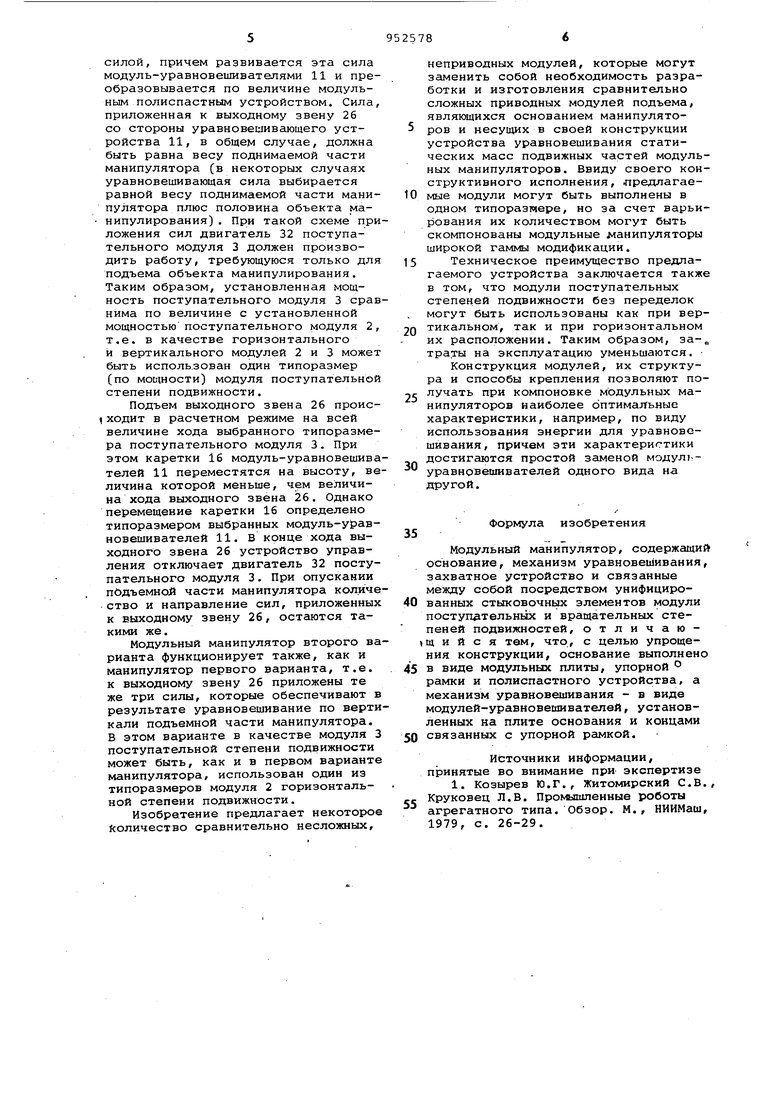
на фиг. 5 - модуль-уравновешиватель; общий ВИД) на фиг. б - сечение В-Б i на фиг. 5; на фиг. 7 - модуль-блок, 5 общнй;вид; на фиг. 8 - сечение Г-Г на фиг. 7; на фиг. 9 - резьбовой крёпежйый элемент; на фиг. 10 - поступательный модуль, обедай вид; на фиг. 11 - конструкция модульного манипулятора второго варианта; на
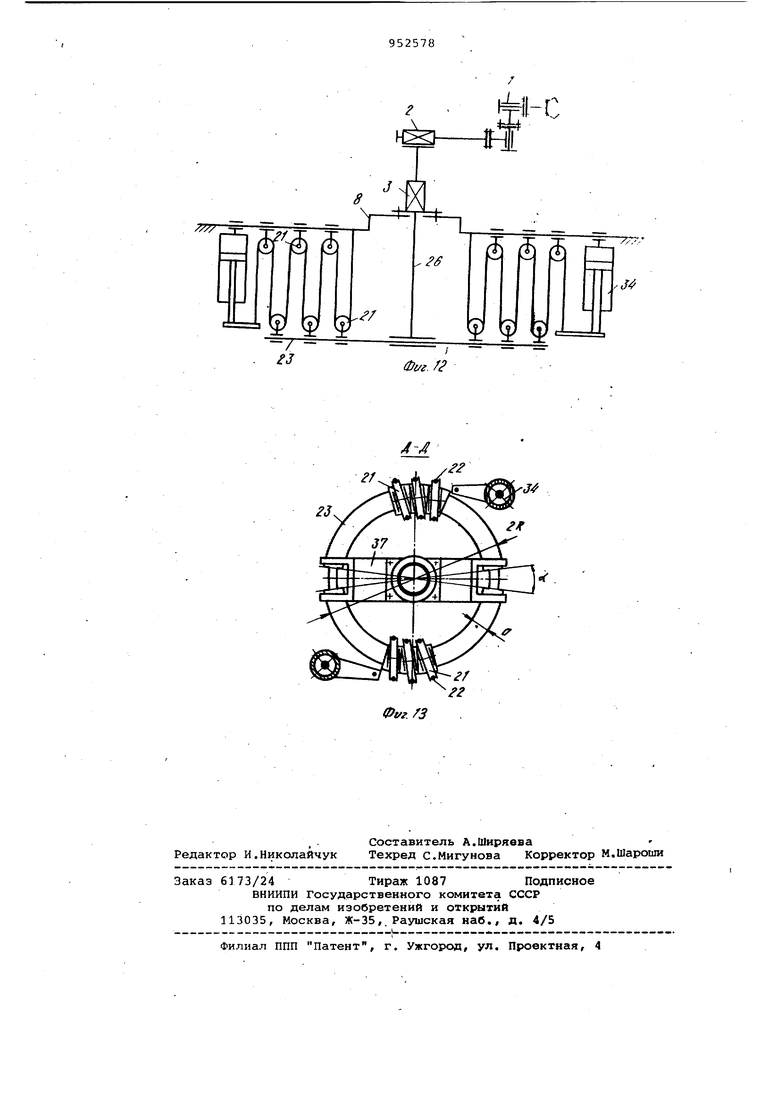
10 фиг. 12 - то же, кинематическая схема; на фиг. 13 - разрез Д-Д на фиг. 11.
Модульный манипулятор содержит вращательные 1 и поступательные 2 и
15 3 модули,- соединенные с помощью резьбовьзх крепежных элементов 4, выпол иенных в виде шпилек 5, на концах которых нарезаны резьбы правого и левого направления, а в средней части
20 расположена подвижная в продольном направлении втулка 6, Втулка б оснащена снаружи шестигранником под и наружными комическими поверхностями 7 на торцах. Вертикально рас25положенный поступательный модуль 3 идентичен типоразмеру горизонталь- i
I ного поступательного модуля 2. Поступательный модуль 3 посредством резьбовых крепежных элементов 4. соединен
30 с плитой, являющейся опорой всего
ман шулятора. На другом торце модуль-плиты 8 расположено профилированное кольцо 9, выполняющее функции основной привалочной пдверхности. Наружный радиус кольца 9 R, ширина кольца а. В диаметрально противоположных точках кольца 9, снаружи и изнутри, имеются вырезы 10, угол раскрытия которых равен d .
На модуль-плите 8 установлено устройство уравновешивания, состоящее из четырех модуль-уравновешивателей 11, в которых размещена пружина 12, но может быть использован пневмоцилиндр или гидроцилиндр. Модул ь-уравновешиватель 11 содержит, кроме пружины 12, кронштейн 13, в котором одним концом закреплена стойка 14. На другом конце стойки 14 установлен ограничитель 15. Между ограничителем 15 и кронштейном 13 размещена пружина 12 и линейно подвижная каретка 16, оснащенная упором 17. Кронштейн 13 и упор- 17 оснащены ответными привалочными поверхностями, выполненными в виде паза 18 с заплечиками 19. Внутренняя вертикальная сторона 20 паза 18 расточена по радиусу R, а ширина паза 18 равна а. Углы тел кронштейна 13 и упора 17, измеренные в горизонтальной плоскости, равны d . Таким образом, основная привалочная поверх ность является поверхностью,схватываемой по посадке ответной привалочной поверхностью.
На модуль-плите 8 установлены, например, шесть модуль-блоков 21, составляющих вместе с тросами 22 и с другими шестью модуль-блоками 21, установленными на модуль упорной рс1мке 2 3, модульное полиспастное устройство. Модуль-блок 21 представляет собой кронштейн 24, на котором установлен шкив 25. Угол тела кронштейна 24, измеренный в горизонтальной плоскости, равен ot. Кронштейн 24 оснащен ответной привалочной поверхностью, выполненной в виде паза 18, внутренняя вертикальная сторона 20 которого имеет радиус R, а ширина паза 18 а. Ось шкива 25 развернута на некоторый угол, зависящий от диаметра шкива 25 и размера угла А кронштейна 24, обеспечивающий тросам 22, при последовательном схвате шкивов 25 всех модуль-блоков 21, отсутствие скольжения по ручьям шкивов 25. Модульная упорная рамка 23 выполнена в- виде кольца 9, наруж ный радиус которого R, ширина а. В диси«1етрально противоположных точках упорной рамки 23 сделаны вырезы 10, угол раскрелтия которых ot. . Выходное (подвижное) звено 26 поступательного модуля 3 соединено с одним концом тросов 22, которые затем последовательно охватывают свои группы шкивов
25верхних и нижних модуль-блоков 21. Поступательный исполнительный мо- ;
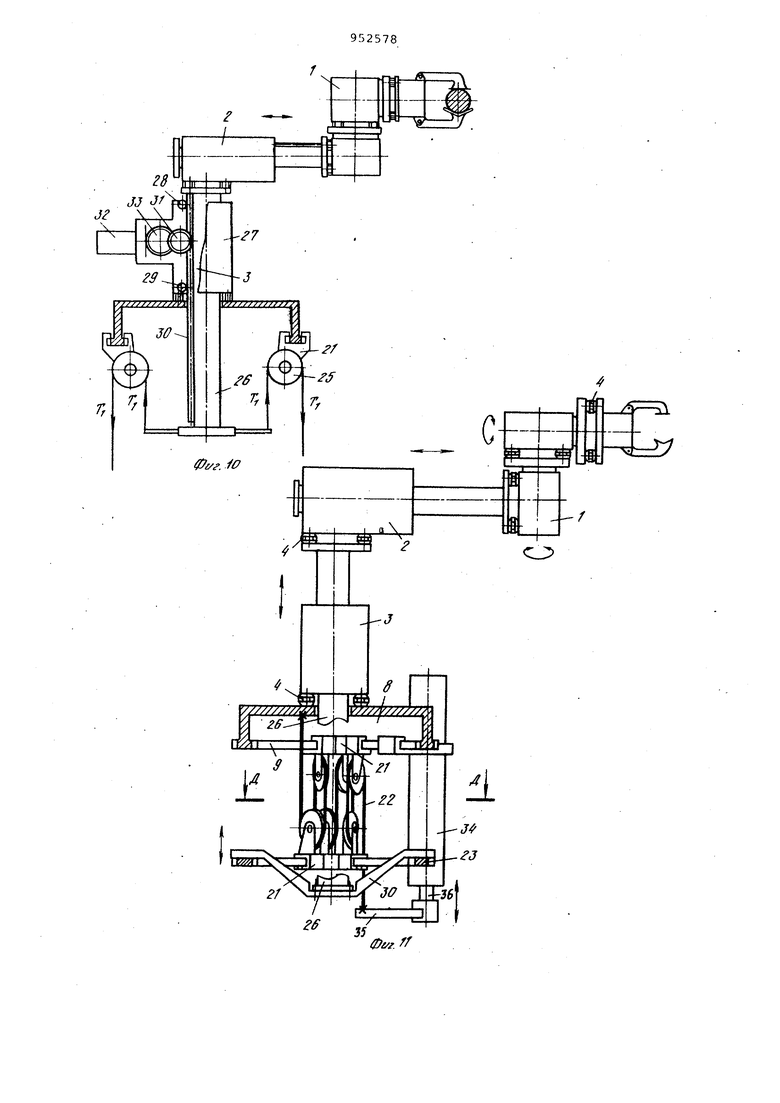
дуль 3 имеет неподвижный корпус 27, оснащенный двумя поясами 28 и 29
опор качения (по три подшипника в
поясе под углом в 120° друг к другу), в которых MOJiCeT поступательно двигаться, т.е. имеет одну степень подвижности, выходное звено 26. На выQ ходном звене 26, вдоль его оси, прикреплена зубчатая рейка 30, в зацеплении с которой находится шестерня 31, связанная с двигателем 32 при помощи редуктора 33. Шестерня 31,
- двигатель 32 и редуктор 33 установлены в неподвижном корпусе 27 поступательного исполнительного модуля 3. МОДУЛЬНЫЙ манипулятор второго варианта (фиг.11), в общем случае, содержит те же элементы (модули) , что и модульный манипулятор первого варианта. В качестве примера модульуравновешиватель 34 в этом манипуляторе выполнен на основе пневмоцилиндра. Выходной упор 35 модульуравновешивателя 34 закреплен на штоке 36 пневмоцилиндра. Однако существенное различие модульных манипуляторов первого и второго вариантов состоит во взаимных связях входящих в
манипуляторы узлов. В модульном мани Tiyjia-rope второго варианта на модульплите 8 и модульной упорной рамке 23 также размещено по шесть модуль-блоков 21. Однако тросы 22, зафиксированные одним кондом на модуль-плите 8, после последовательного схвата . шкивов 25 верхних и нижних модульблоков 21, другим концом закреплены непосредственно на упорах 35 модуль0 уравновешивателей 34. Выходное звено
26связано при помощи коромысла 37
с модульной упорной рамкой 2 3. Такая компоновка позволяет уравновешивать большие веса подвижных частей манипуляторов, используя модуль-уравновешиватель 34, имеющих большие хода штоков 36 и невысокие величины усилий на штоках 36.
Модульный манипулятор работает
f. следующим образом.
По команде устройства управления поступательный модуль 3 начинает подъем выходного звена 26. К выходному звену 26 приложены три силы; Biec самого звена 26 и установленных на
5 нем вращательных модулей 1 и поступательного модуля 2 и т.п. Со стороны двигателя и механической передачи, установленных в поступательном модуле 3, на выходное звено 26 действует движущая сила, направленная навстречу силам веса поднимаемых частей .манипулятора. К нижней части выходного звена 26 в месте крепления тросов 22 приложена сила, действующая в одном направлении с движущей
силой, причем развивается эта сила модуль-уравновешивателями 11 и преобразовывается по величине модульным полиспастным устройством. Сила, приложенная к выходному звену 26 со стороны уравновешивающего устройства 11, в общем случае, должна быть равна весу поднимаемой части манипулятора (в некоторых случаях уравновешивающая сила выбирается равной весу поднимаемой части манипулятора плюс половина объекта манипулирования). При такой схеме приложения сил двигатель 32 поступательного модуля 3 должен производить работу, требующуюся только для подъема объекта манипулирования. Таким образом, установленная мощность поступательного модуля 3 сравнима по величине с установленной мощностью поступательного модуля 2, т.е. в качестве горизонтального и вертикального модулей 2 и 3 может быть исполь.зован один типоразмер (по мощности) модуля поступательной степени подвижности.
Подъем выходного звена 26 происходит в расчетном режиме на всей величине хода выбранного типоразмера поступательного модуля 3. При этом каретки 16 модуль-уравновешивателей 11 переместятся на высоту, величина которой меньше, чем величина хода выходного звена 26. Однако перемещение каретки 16 определено типоразмером выбранных модуль-уравновешивателей 11. В конце хода выходного звена 26 устройство управления отключает двигатель 32 поступательного модуля 3. При опускании пбдъемной части манипулятора кол.ичество и направление сил, приложенных к выходному звену 26, остаются такими же.
Модульный манипулятор второго варианта функционирует также, как и манипулятор первого варианта, т.е. к выходному звену 26 приложены те же три силы, которые обеспечивают в результате уравновешивание по вертикали подъемной части манипулятора. В этом варианте в качестве модуля 3 поступательной степени подвижности может быть, как и в первом варианте манипулятора, использован один из типоразмеров модуля 2 горизонтальной степени подвижности.
Изобретение предлагает некоторое Количество сравнительно несложных.
неприводных модулей, которые могут заменить собой необходимость разработки и изготовления сравнительно сложных приводных модулей подъема, являющихся основанием манипуляторов и несущих в своей конструкции устройства уравновешивания статических масс подвижных частей модульных манипуляторов. Ввиду своего конструктивного исполнения, лредлагаемые модули могут быть выполнены в одном типоразмере, но за счет варьирования их количеством могут быть скомпонованы модульные манипуляторы широкой гаммы модификации.
Техническое преимущество предлагаемого устройства заключается также в том, что модули поступательных степеней подвижности без переделок могут быть использованы как при вертикальном, так и при горизонтальном их расположении. Таким образом, затраты на эксплуатацию уменьшаются. Конструкция модулей, их структура и способы крепления позволяют получать при компоновке модульных манипуляторов наиболее оптимальные характеристики, например, по виду использования энергии для уравновешивания, причем эти характеристики достигаются простой заменой модульуравновешивателей одного вида на другой.
Формула изобретения
35
Модульный манипулятор, содержащий основание, механизм уравновешивания, захватное устройство и связанные между собой посредством унифицированных стыковочных элементов модули поступательных и вращательных степеней подвижностей, отличаю щ и и с я тем, что, с целью упрощения конструкции, основание выполнено
в виде модульных плиты, упорной рамки и полиспастного устройства, а механизм уравновешивания - в виде модулей-уравновешивателей, установленных на плите основания и концами
связанных с упорной рамкой.
Источники информации, принятые во внимание при экспертизе
1. Козырев Ю.Г., Житомирский С.В., Круковец Л.В. Промышленные роботы агрегатного типа. Обзор. М., НИИМаш, 1979, с. 26-29.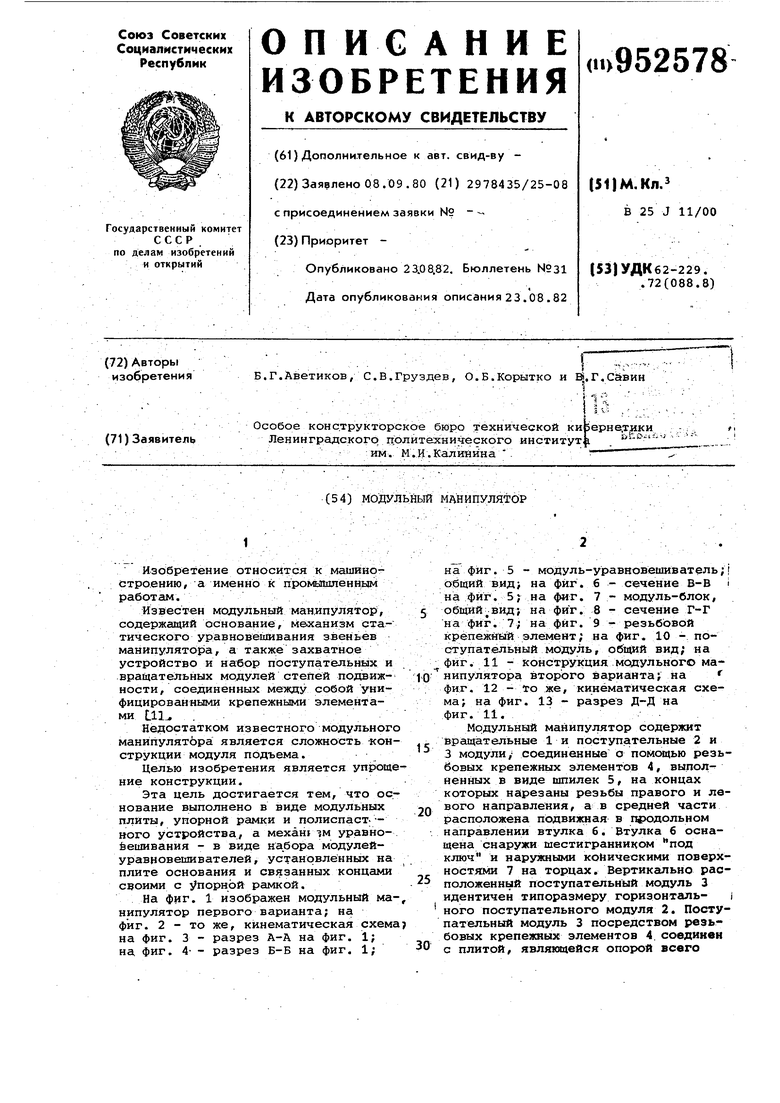
| название | год | авторы | номер документа |
|---|---|---|---|
| Модуль манипулятора | 1980 |
|
SU984859A1 |
| Манипулятор модульного типа | 1983 |
|
SU1252162A1 |
| Модульное устройство для перефутеровки барабанных мельниц | 2017 |
|
RU2665938C1 |
| БАЗОВЫЙ МОДУЛЬ МАНИПУЛЯТОРНОЙ МАШИНЫ | 2012 |
|
RU2522496C2 |
| Ведущий манипулятор роботохирургического комплекса | 2022 |
|
RU2803231C1 |
| Устройство управления манипуляторами роботохирургического комплекса | 2020 |
|
RU2757969C1 |
| Пильно-обрабатывающее устройство для обработки пластикового профиля | 2019 |
|
RU2710702C1 |
| Уравновешенный манипулятор | 1991 |
|
SU1813621A1 |
| РАСКЛАДЧИК НАМОТОЧНОГО СТАНКА | 2009 |
|
RU2392214C1 |
| Манипулятор модульного типа | 1990 |
|
SU1775289A1 |
фуг.
/Ч-4
(риг.з
uz.4
WA
ГУ rats
Фиг.
ие. 6
Г-Г
Фиг. 3
гз
m-i:
. /
