Изобретение относится к манипуляторам и может быть использовано в различных областях техгп-пси.
Целью изобретения является расширение технологических возможностей за счет модульных перекомпоновок. На фиг,1 изображен манипулятор модульного типа, обпгий ка фиг.2 - вид А на фиг,1| на фиг.З (а, 5& ) варианты компоновок модулей прямолинейного перемещения; на (oijS ) - варианты компоновок модулей вращательн)х с одной степенью подвижности:, на фиг , 5 (а, 6 ) - варианты компоновок модулей вращательных с двумя степенями подвижности; на - компоновка модулей, продольный разрез; на фиг.-вариант компоновки модулей вращательных с тремя степенями подвижности ,
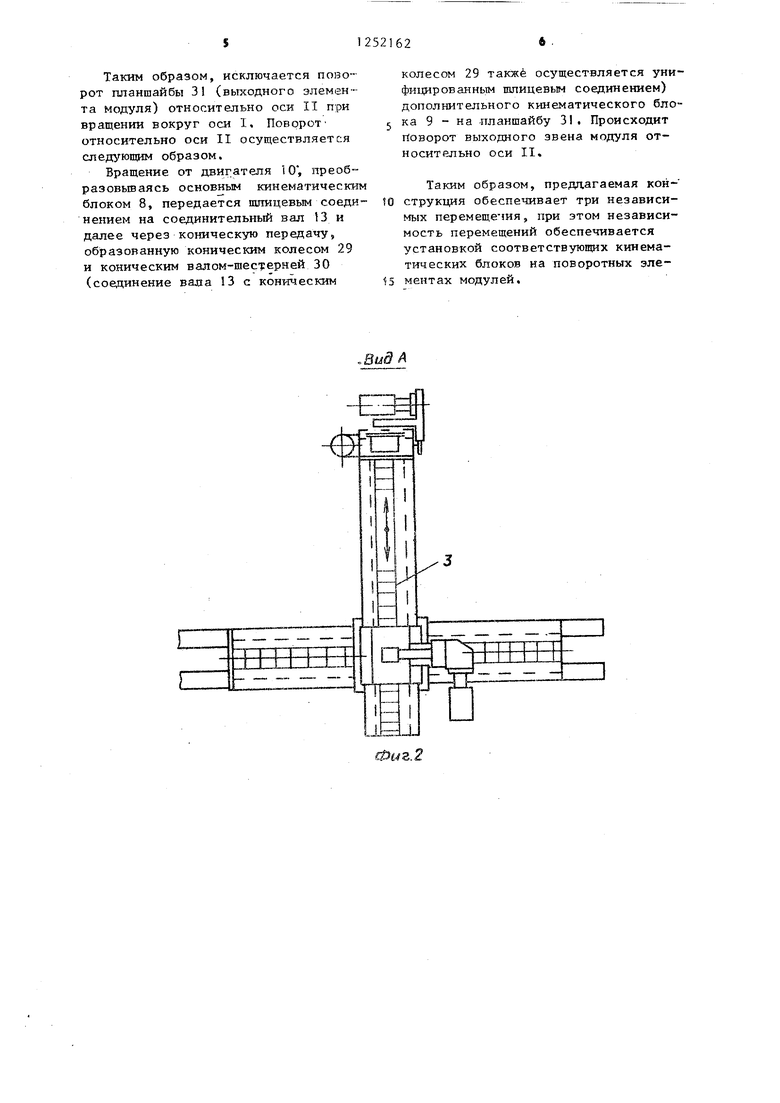
Манипулятор модульного типа (фиг 1 и 2) установлен на металло- конструк1щи 1 агрегатной сварочной машины с программнъ м управлением и содержит модули 2-4 прямолинейного перемещения 5 а также модуль 5 врашп- тельный, например, с одной степенью подвижности.
Модули прямолинейного перемещения (фиг.З а,8 5 fe) выполнены из конструктивных блоков и содержат., в частности, каретку 6, балку 7, основной кинематический блок 8 (блок, обязательно присутствую1щй во всех компоновках модулей данного типа и имеющий передаточное число отличное от единицы), который в модулях прямолинейного перемеше яия может быть построен,, например, на базе цилиндрической зубчатой передачи; дополнительный кинекатический блок 9 с передаточньпч числом pasirpSM гдинице, что обеспечивает неизменность выхо.п- ных параметров при перекомпоновках служащий для разворота осей врашения на 90°5 и двигатель 10.
Все блоки имеют унифицированные стыковочные элементы 1 1 -. Модули 5 вращательные с одной степенью под-- винностй вьтолнены из конструктивных блоков (варианты компоновок показаны на фиг,4 а 5 S ) и содержат в частност основной кинематический редуктор 8j дополнительные киненатиггескне блоки 9 и 12.
Дополнительный К1ет,ематическ:ий блок 12 служит для параг5лельного ответвления кинематической депи, его передаточное число равно единице. Все блоки имеют унифицированные стыковочные элементы 11 и могут монтироваться как на одном г}шанце балки модуля прямолинейного перемещения (фиг, Aq) так и па двух (фиг,4Е) Передача врашения при этом осуществляется соеднительным валом 13,
Модули вращательные с двумя степенями подвижносги выполнены из конструктивных блоков (варианты коМпоновок показаны на фиг,5 0,5) и содержат кроме еще одного соединительного
ва.па 4 и опорно-поворотного блока 15 блоки описанные ранее,
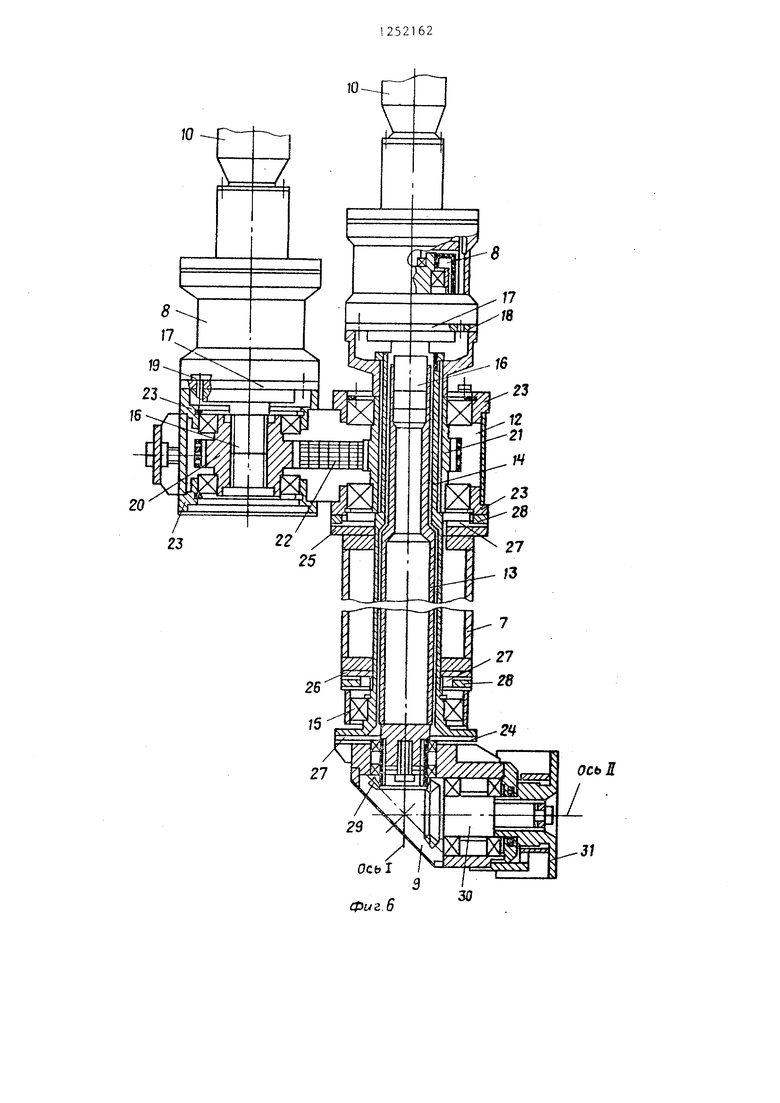
Конструкпд-ш г-;екоторых основных кинематических блоков показань на фиг, 6, Основргые кинематические блоки
смонткровань на фланцах балки 7 мо- дуля прямолинейного перемещения, с:тыковочнь мп элементами основных кинематических блоков 8,8 служат :«х выходные валы 1 6 с шпицевыми кон:1ами. На привалочных фланцах 17 основных кинематических блоков 8,8 расположены отверстия 8 для фикса- пди их крепежз- ыми элементами 19. Основные кинематг1ческие блоки 8,8
гюстроепы на базе волновых передач.
Звездочка 20 дополнительного кине- 1- атического блока 12, построенная на базе цепной передачи,, вьшолнена полой, размеры шлицевого отверстия
в ней унифиц -1рованы с валом основ- кинематических блоков 8.8 .
азмеры отверстия Б полой звездочке 21 унифицированы со шлицами ча соед111гитйпьном валу 4 Звездочки 20 и 21 соединены цепью 22 На привалочных фланцах 23 дополнительного кинематического блока 12 имеются группь отверстий; унифицированные с отверстиями 1В на привалочных
фланцах 17 основных кинематических блоков 8 и 8 5 на српаице 24 дополнительного кинематическог о блока 9 и на фланцах 25 и 26 модуля прямолинейного перемещения.
Прксоед хнение конструктивных
блоков осуществляется крепежными элементами 9. На привалочных фланцах конструктивных блоков, сопрягаемых с бгшкой или кареткой модуля
прямолинейкого перемещения, предусмотрены пазы 27;, которые позволяют. крепить посредством шприок 28 дополнительные к-1 кемат-ичес;сие блоки 9
и 12 и опорно-поворотный блок 5 на бапке 7, Дополнительный кинематический блок 12 симметричен относительно продольной плоскости.
Б дополнительном К1шематическом блоке 9 коническая шестерня 29 выполнена полой, при этом размеры гпли цевого отверстия в ней унифищтрова- ны с отверстием н звездочке 20 и шлицевым концом соединительного вала 13, по которому она и центрируется, фиксируя положение дополнительного кинематического блока 9. Корпус дополнительного кинематического блока 9 снабжен фланцем 24, на котором расположены группы отверстий и шпоночные пазы 27, унифицированные с другими кинематически- r-fl-i блоками аналогичнь ми элементами на фланцах балки и каретке модуля прямолинейного перемещения.
Сопряженный с коническрш колесом 29 конический вал - шестерня 30 имеет пшип,евой конец, являющийся выходным элементом дополнительного кинематического блока 9, и унифици- рованньш с присоединительным отверстием в выходном элементе манипулятора - планшайбе 31, Г1рисоед1-51тительное отверстие в планшайбе 31 уни- фицировано с вь xoдны f валом 16 осно ного кинематического блока 8 (8) , что позволяет, например, легко полу .чить схему компоновки модуля (фиг.Аа), где дополнительный кинематический блок расположен непосредственно; на дополнительном кинематическом блоке 12, при этом для передачи вращения от дополнительного кинемат1тческого. блока 12 к блоку 9 может использоваться переходный шлицев ой вал.
Связь между конструктивными блокми модуля осуществляется соединителными валами 13 и 14, присоединительные места которых (шлицеяые концы, отверстия и пазы на фланцах, посадочные шейки) унифицированы с сопрягаемыми элементами других конструктивных блоков
На фиг . 5 & пр€ул;ставлен вариант компоновки модуля вращательного с двумя степенями подвижности, все ки нематические блоки которого смонтированы на кронштейне 32, который может быть закреплен, например, на каретке модуля прямолинейного перемещения .
521624
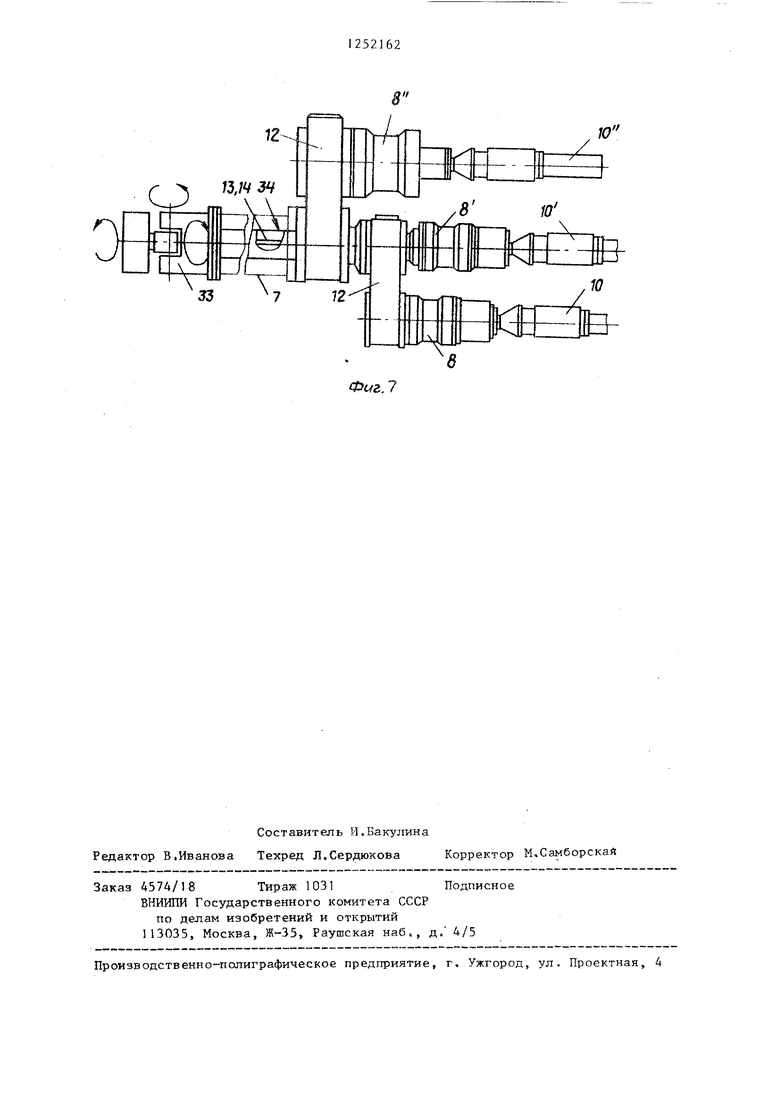
На фиг.7 представлен вариант компоновки модуля вращательного с тремя- степенями подвижности, он содержит один дополнитепьный кинемат1гческий 5 блок 33, не использовавшийся в описанных компоновках и предназначенный для распределения вращений, передаваемых соединительными валами 13 и 14 от кинематических блоков, располо- 0 женньгх на заднем фланце балки 7 на - наклон и вращение выходного звена модуля.
Дополнительный кинематический блок 33 имеет привалочный фпанец, 15 крепежные отверстия и пазы, унифицированные с аналогичными элементами других блоков, описанных вьппе.
На фиг.7 блок 33 установлен на соединительном валу 34, который по- 20 лучает вращение от двигателя 10 через дополнительный кинематический блок 12,
Шшк 33 используется и в некоторых компоновках модулей вращательных с 25 двумя степеняг-ги подвижности при соответствующей схеме движений выходного звена модуля.
Работает манипулятор модульного типа, состоящий, например, из двух 30 модулей (фиг.5 а ,S ) следующим образом.
Модуль вращательный с двумя степенями подвижности, закрепленный на балке 7 модуля прямолинейного пере- мещения, перемещается вместе с ней , вдоль оси I относительно каретки модуля прямолинейного перемещения, которая жестко закреплена на металлоконструкции. Привод перемещения 0 при этом осуществляется, например, в соответствии с фиг.З (а, Б и Ь ), Поворот относительно оси I осуществляется в спедующем порядке (фиг.6). Вращение от двигателя 10, преоб- 5 разовьшаясь основным кинематическим блоком 8 посредством шлицевого соединения, передается на звездочку 20 дополнительного кинематического блока 12, Цепью 22 вращение пере- 0 дается на звездочку 21 и через щли- цевое соединение - на соединительный вал 14. который, вращаясь, пово- рач11вает дополнительный кинематический блок 9 вокруг оси I. При этом 5 происходит поворот основного кинема- гкческого блока 8 и двигателя 10, установленных на соединительном в JT. - 14 относительно той же оси.
Таким образом, исключается поворот планшайбы 31 (выходного элем(гн- та модуля) относительно оси II при вращении вокруг оси I, Поворот относительно оси II осуществляется следующим образом.
Вращение от двигателя 10, :преоб- разовьгоаясь основным кинематическим блоком 8, передается потицевым соединением на соединительный вал 13 и далее через коническую передачу, образованную коническим колесом 29 и коническим валом-шестерней 30 (сое,динение вала 13 с коническим
колесом 29 также осуществляется уни- фицированньтм шлицевын соединением) дополнительного кинематического бло- ка 9 - на планшайбу 3. Происходит Поворот выходного звена модуля относительно оси II,
Таким образом, преддагаемая кон- струкция обеспечивает три независимых перемещечия, при этом независимость перемещений обеспечивается установкой соответствующих кинематических блоков на поворотных эле- ментах модулей.
,8ид А
Фмг.2
If
Ё
л
«
8 П

| название | год | авторы | номер документа |
|---|---|---|---|
| Модульный манипулятор | 1980 |
|
SU952578A1 |
| Манипулятор модульного типа | 1977 |
|
SU763082A1 |
| Манипулятор модульного типа | 1988 |
|
SU1558663A1 |
| Трансмиссия механическая модульная | 2022 |
|
RU2780248C1 |
| Манипулятор модульного типа | 1990 |
|
SU1775289A1 |
| Шпиндельный блок токарного автомата | 1990 |
|
SU1773569A1 |
| Модуль манипулятора | 1980 |
|
SU984859A1 |
| ПОДВЕСНОЕ МАНИПУЛИРУЮЩЕЕ УСТРОЙСТВО С РУЧНЫМ УПРАВЛЕНИЕМ | 2014 |
|
RU2561559C1 |
| Исполнительный орган промышленного робота | 1978 |
|
SU766855A1 |
| Модульное орудие для обработки почвы | 2020 |
|
RU2739475C1 |



Фиг.З
Еда
-Arf ll
tt -p 1 IJtliiiFn
ft
Д
С
kr.
1 If
С
kr.jj
iffi i If Bh™. ,-.. ..ilaJI|jl yjL-
ю
/о
16
23
ОсьЕ
Ocbl
фиг. 6
&
Фиг.7
| Манипулятор модульного типа | 1977 |
|
SU763082A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
