Манипулятор предназначен для работы в автоматическом цикле, например в автоматических станочных линиях.
Известны промышленные манипуляторы, в которых основные транспортирующие перемещения происходят по прямым линиям параллельно трем взаимно перпендикулярным осям. Эти манипуляторы имеют перемеш,ающуюся относительно неподвижного основания (вдоль оси У) вертикальную колонну, па которой подвижно закреплена рука с захватом и механизмом его ориентации, перемещающаяся относительно колонны вертикально (ось Z) и горизонтально (ось X). Такой манипулятор имеет малый объем зоны обслуживания при больших собственных габаритах, что влечет за собой большие площади для его установки на производстве.
Известны также промышленные .манипуляторы, па основании которых установлена поворотная относительно вертикальной оси колонна. На колонне на подвижной каретке закреплена рука с захватом и механизмом его ориентации, имеющая горизонтальное и вертикальное прямолинейные перемещения относительно колонны. Основные транспортирующие движения таких манипуляторов происходят в цилиндрической системе координат. Манипуляторы имеют несколько больший рабочий объем при меньших собственных габаритах и,
следовательно, занимают меньшую площадь на производстве. Однако их недостатком является более ограниченная возможность перемещений по прямым линиям, проходящим параллельно трем осям координат, так как перемещения вдоль оси У могут у них выполняться только по дугам окружностей.
Кроме того, известны промышленные манипуляторы, на неподвижном основании которых расположена поворотная относительно вертикальной оси колонна. На колонне шарнирно закрепле 1а рука с захватом и .механизмом его ориентации, имеющая движение качания относительно горизонтальной оси и прямолинейное выдвижение руки вдоль оси, перпендикулярной оси качания. Манипуляторы, имеющие такую компоновку, имеют больший, по сравнению с рассмотренными ранее, относительный объем зоны обслул ивания. Их недостатком, однако, является еще более ограниченная возможность перемещения по прямым линиям, проходящим параллельно трем осям координат, так как перемещения вдоль осей У и Z могут выполняться у них только по дугам окружности.
Цель изобретения - создание такой конструкции промышленного манипулятора, которая позволила бы иметь прямолинейные перемещения, параллельные трем взаимно перпендикулярным осям при максимальном относительном объеме рабочей зоны. Это достигается тем, что на основании манипулятора смонтирован поворотный стол, по направляющим которого перемещается каретка с установленными на ней вертикальными колоннами, несущими вертикально перемещающийся корпус с HiapHHpHO закрепленной на нем телескопически выдвигаюитейся рукой.
На фиг. и.шбражеи предлагаемый .манипулятор 1 двух проекциях; )ia фиг. 2 показаны возможные комг1оно11ки манипулятора.
На основании 1 манипулятора закреплен поворот} ый стол 2, по направляющим 3 которого перемещается каретка 4 с колоннами 5 и 6, несущими корпус 7. На оси 8 корпуса шарпирно установлен корпус 9, в котором закреплена перемещающаяся вдоль своей оси рука 10 с захватом 11 и мехапизмом его ориентации 12.
Вращение манипулятора относительно оси I-I обеспечивается вращением поворотного стола 2; горизонтальное перемещение вдоль оси II-II - возвратно-поступательным перемещением каретки по направляющим 3 стола. Вертикальный нодъем вдоль оси I-I осуществляется при перемещении корпуса 7 по колоннам 5 и 6. Вращение относительно оси III-III обеспечивается шарнирной установкой руки 10 на оси III-III. Кроме того, для манипулятора характерны нрямолинейное перемещение руки 10 вдоль оси IV-IV - телескопическое выдвижение руки, а также вращение захвата 11 с помощью механизма ориентации 12 относительно осей V-V и VI-VI. Все перемещения осуществляются от индивидуальных приводов (на фигурах не показаны).
Таким образом, ори любом угле поворота руки 10 относительно оси I-I манипулятор имеет возможиость прямолинейных перемещений, параллельных трем взаимно перпендикулярным осям - оси I-I, оси II-II и оси IV-IV при горизонтальном положении руки. Кроме того, манипулятор имеет возможность прямолинейных неремещений параллельно осям I-I и II-И при любом угле поворота руки относительно осей I-I и III-III.
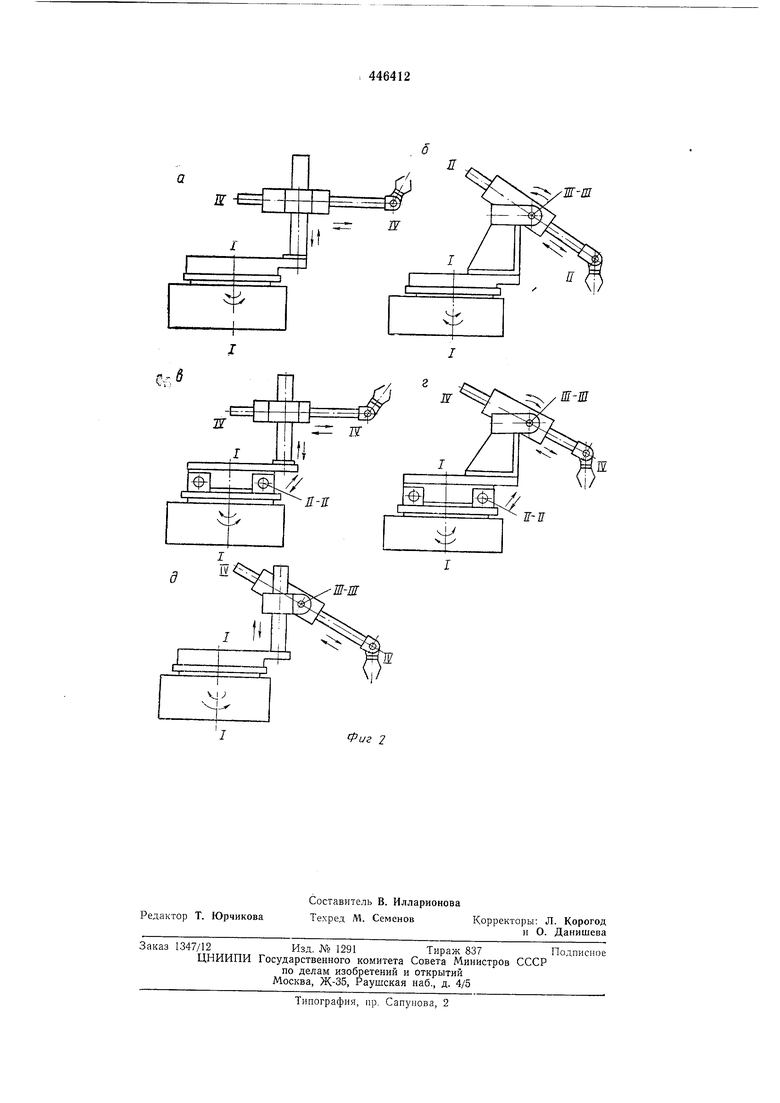
Когда по технологическим условиям не требуется использование всех возможностей, представляемых предлагаемым манипулятором, он может быть выполнен по одной из комноновок, показанных на фиг. 2, полученной путем исключения из основной компоновки одного или двух из следующих трех движений: горизонтального перемещения вдоль оси II--II, вертикалького подъема вдоль оси I-I и вращения руки относительно оси III-III.
Выполнение узлов манипулятора в виде блоков с возможностью их стыковки между собой в различных сочета)1иях позволяет выпускать предлагаемую ко:,гпоповку с семью степенями свободы в виде модиф: каций.
1.Манипулятор, имеющий пять степеней подвижности с основными транспортирующими перемещениями в цилиндрической системе координат, получаемый при исключении из основной компоновки горизонтального перемещения параллельно оси II-II и вращения руки относительно оси III-III (см. фиг. 2, а).
2.Манипулятор, имеющий пять степеней подвижности с основными транспортирующими перемеидениями в сферической системе координат, получаемый путем исключения из основной комионовки горизонтального перемещения параллельно оси II-II и вертикального подъема (см. фиг. 2,6).
3.Манипулятор, имеющий шесть степеней подвижности, получаемый путем исключения из основной комионовки вращения руки относительно оси III-III (см. фиг. 2, б).
4.Маиипулятор, имеющий шесть степеней подвижности, получаемый путем исключения из основной компоновки вертикального подъема руки (см. фиг. 2, г).
5..Манипулятор, имеющий щесть стеиеней иодвижности, получаемый нутем исключения из основной комноновки горизонтального перемещения вдоль оси П-II (см. фиг. 2,д).
Предмет изобретения
Маиипулятор с рукой, имеющей радиальное перемещ ение, вращающейся относительно основания и снабженной захватом с механизмо.м его ориентации, отличающийся тем, что, с целью расширения технологических возможностей, на его основании смонтирован поворотный стол с горизонтальными направляющими, несущими каретку с установленными на ней вертикальными колоннами, несущими подвижный корпус с шарнирно закрепленной на нем телескопически выдвигающейся рукой.
Фиг 7
а
И
fe
Ж
п-п
ш-ш
ж-ш
ш-ш
Фиг 2

| название | год | авторы | номер документа |
|---|---|---|---|
| Манипулятор модульного типа | 1977 |
|
SU763082A1 |
| АССИСТИРУЮЩИЙ ХИРУРГИЧЕСКИЙ КОМПЛЕКС | 2020 |
|
RU2720830C1 |
| Промышленный робот | 1978 |
|
SU837852A1 |
| Стенд для сборки трубных пучков секций аппаратов воздушного охлаждения | 1984 |
|
SU1234150A1 |
| ВЫСОКОСКОРОСТНОЙ МЕТАЛЛОРЕЖУЩИЙ ПЯТИКООРДИНАТНЫЙ ЦЕНТР С ТРИПОД-МОДУЛЕМ | 2005 |
|
RU2285602C1 |
| Промышленный робот | 1978 |
|
SU837851A1 |
| БАЛАНСИРНЫЙ ПНЕВМАТИЧЕСКИЙ МАНИПУЛЯТОР | 2013 |
|
RU2625356C2 |
| МЕДИЦИНСКАЯ РОБОТИЗИРОВАННАЯ СИСТЕМА | 2007 |
|
RU2412799C2 |
| Мобильная буровая установка | 2016 |
|
RU2647522C2 |
| РОБОТИЗИРОВАННАЯ ХИРУРГИЧЕСКАЯ СИСТЕМА ДЛЯ ВЫПОЛНЕНИЯ МИНИМАЛЬНЫХ ИНВАЗИВНЫХ ВМЕШАТЕЛЬСТВ | 2007 |
|
RU2412800C2 |