Изобретение относится к вспомогательному оборудованию кузнечнопрессовых цехов, а именно к конструкциям рабочих узлов ковочных манипуляторов .
Известен механизм вращения хобота ковочного манипулятора, содержащий электродвигатель с фазовым ротором, кинематически связанный с ним планетарный редуктор, и тормоз в виде соединенных между собой тягой прижимных колодок с механизмом регулирования усилий их прижима fl.
К недостаткам известного механизма враидения относятся невысокие производительность и надежность работы, так какiрегулирование усилия прижима колодок тормоза осуществляется периодически, а не постоянно во время работы, а поэтому из-за износа колодок и переменного коэффициента трения между колодками и корпусом планетарного редуктора . тормозной момент изменяется, что приводит к динамическим перегрузкам.
Для повышения производительности и надежности работы механизм регулирования усилия прижима колодок .выполнен в виде Лриводного от индивидуального электродвигателя зубчатого колеса, ось которого жестко связана с тягой прижимных, колодок
5 и выполнена с-винтовой нарезкой, зафиксированной от поворота и подпруЖиненной относительно одной из колодок втулки с внутренней винтовой нарезкой, обхватывающей ось
10 зубчатого колеса, а также блока управления и установленного на корпусе хобота тахогенератора, кинематически связанного с корпусом планетарного редуктора, при этом
.с блок управления электрически связан с электродвигателем механизма регулирования усилия прижима колодок, тахогенератором и посредством токовых реле и трансформатора тока - с
20 фазовой обмоткой ротора электродвигателя вращения хоботй ковочного манипулятора.
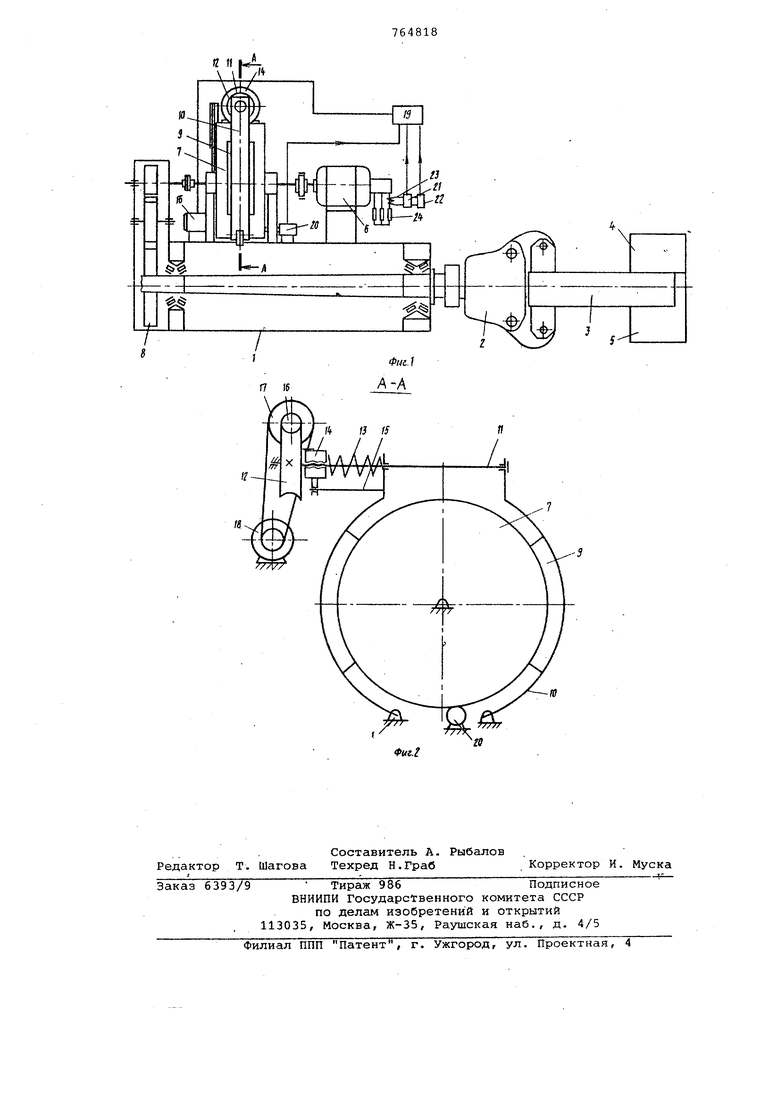
На фиг. 1изображено предлагаемое устройство, общий вид на фиг.2
25 дано сечение А-А йа фиг. 1.
На корпусе хобота 1 закреплен еханизм клещевой головки 2 с зажатой поковкой 3, деформируемой бойками 4 и 5 пресса. Механизм
3Q вращения хобота ковочного манипулятора состоит из электродвигателя с азовым ротором 6, планетарного реуктора 7, цилиндрического редуктоа 8, тормоза, шкивом которого слуит корпус планетарного редуктора. Тормоз состоит из тормозных колодок 9, стоек 10, соединенных тягой 11, на которой жестко закреплено червячное колесо 12, предназначенное п,л.я вращения тяги 11 при изменении усиия пружины 13, прижимающей тормозные колодки 9, при помощи перемещения втулки 14 вдоль направляющей 15. ервячное колесо 12 связано с черяком 16, вращение которого осуществляется посредством клиноремённой передачи 17 от индивидуального электродвигателя 18, цепь управления которого связана с блоком управления 19. Блок управления 19 соединен с тахогейератором 20, установленным на на корпусе хобота 1 и кинематически связанным, с корпусом планетарного редуктора. Блок управления связан через токовые реле 21 и 22 и трансформатор тока 23 с фазовой обмоткой ротора 24 электродвигателя 6. Токо вое реле 21 предназначено для подачи сигнала в блок управления при незначительном превышении тока в роторе Btiniie номинального, а токовое реле 22 срабатывает при токе в роторе немного ниже номинального.
При включении электродвигателя 6 механизма вращения в. режиме пос-. тояйного вращения, при шлихтовке на определенной ступени реостата в цепи ротора сигнал от этой ступени поступает в блок управления 19. Одновременно в блок управления 19 поступает сигнал от тахогенератора 20, так как корпус планетарного редуктора проворачивается. Если ток в роторе превышает незначительно номинальный ток, .срабатывает токовое реле 21 и подает сигнал в блок управления 19, -Который включает цепь управления электродвигателем 18 привода тормоза на корпусе планетарного редуктора . При вращении электродвигателя 18 уменьшается усилие пружины 13,и ток роторауменьшается до номинального. При этом отключается токовое реле 21 и блок управления подает команду на отключение электродвигателя 18. Если при вращении электродвигателя 6 ток в роторе будет немного меньше номинального.
отключается токовое рела 22 и блок управления включает цепь управления электродвигателем 18 на обратное вращение для увеличения усилия пружины 13. При увеличении тока в роторе выше нижнего предела срабатывает токовое реле 22 и через блок управления 19 электродвигатель 18 отключается.
Предлагаемая конструкция механизма вращения хобота ковочного манипулятора за счет автоматической настройки тормозного момента на корпусе планетарного редуктора обеспечивает повышение производительности и надежность работы.
Формула изобретения
Механизм вращения хобота ковочного манипулятора, содержащий электродвигатель с фазовым ротором, кинематически связанный с ним планетарный редуктор и тормоз в виде соединенных между собой тягой прижимных колодок с механизмом регулирования усилия их прижима, Отличающийс я тем, что, с целью повышения производительнбсти и надежности работы, механизм регулирования усилия прижима колодок выполнен в виде п ; иводного от индивидуального электродвигателя зубчатого колеса, ось которого жестко связана с тягой прижимных колодок и выполнена с винтовой нарезкой, зафиксированной от поворота и подпружиненной относительно одной из колодок втулки с внутренней винтовой нарезкой, обхватывающей ось зубчатого колеса, а также блока управления и установленного на корпусе хобота тахогенератора, кинематически связанного с корпусом планетарного редуктора, при этом блок управления электрически связан с электродвигателем механизма регулирования усилия прижима колодок, тахогенератором и посредством токовых реле и трансформатора тока - с фазовой обмоткой ротора электродвигателя вращения хобота ковочного манипулятора .
Источники информации, принятые во внимание при экспертизе - i. Авторское-свидетельство СССР № 272009, кл. В 21 J 13/10, 1969.
НН. 1 /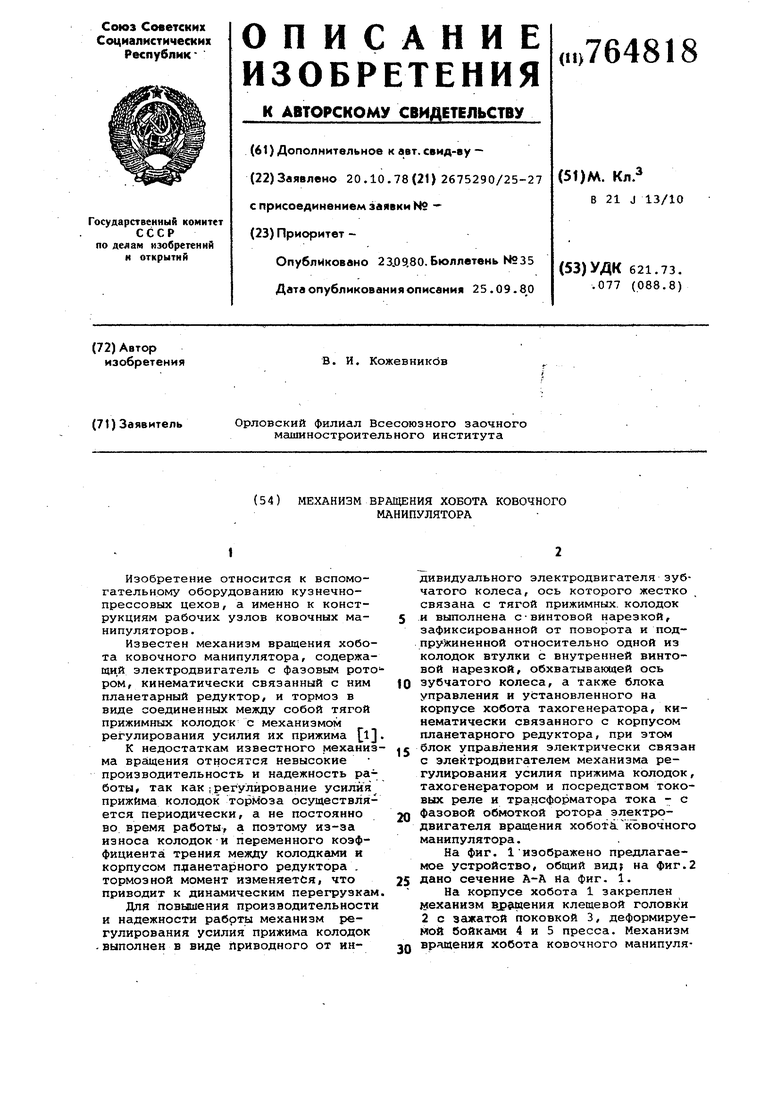
| название | год | авторы | номер документа |
|---|---|---|---|
| Хобот ковочного манипулятора | 1978 |
|
SU795705A1 |
| Ковочный агрегат | 1978 |
|
SU810353A1 |
| Ковочный манипулятор | 1983 |
|
SU1156795A1 |
| Механизм вращения хобота ковочного манипулятора | 1982 |
|
SU1038052A1 |
| КОВОЧНЫЙ МАНИПУЛЯТОР | 1969 |
|
SU233414A1 |
| ПРИВОД МАНИПУЛЯТОРА КОВОЧНОГО ПРЕССА | 1966 |
|
SU183022A1 |
| ЭЛЕКТРОМЕХАНИЧЕСКИЙ ТОРМОЗ | 2010 |
|
RU2424136C1 |
| Хобот ковочного манипулятора | 1977 |
|
SU725773A1 |
| Привод ротационной химической машины | 1973 |
|
SU561495A3 |
| МОБИЛЬНАЯ КАРОТАЖНАЯ ЛЕБЕДКА | 2000 |
|
RU2191741C2 |