(54) ХОБОТ КОВОЧНОГО МАНИПУЛЯТОРА
| название | год | авторы | номер документа |
|---|---|---|---|
| Механизм вращения хобота ковочного манипулятора | 1978 |
|
SU764818A1 |
| Манипулятор | 1980 |
|
SU1166877A1 |
| Клещевой захват ковочного манипулятора | 1983 |
|
SU1134275A1 |
| Хобот ковочного манипулятора | 1977 |
|
SU725773A1 |
| Устройство осевого перемещения хобота ковочного манипулятора | 1976 |
|
SU1038051A1 |
| Ковочный манипулятор | 1974 |
|
SU542582A1 |
| Механизм вращения хобота ковочного манипулятора | 1982 |
|
SU1038052A1 |
| Устройство осевого перемещения хобота ковочного манипулятора | 1984 |
|
SU1220839A1 |
| СТАНОК ДЛЯ РАСКАЛЫВАНИЯ ДРЕВЕСИНЫ | 2011 |
|
RU2479423C1 |
| Устройство осевого перемещения хобота ковочного манипулятора | 1982 |
|
SU1053949A1 |

1
Изобретение относится к вспомогательному оборудованию кузнечно-прессовых цехов, а именно к конструкциям ковочных манипуляторов.
Известен хобот ковочного манипулятора, содержащий корпус, размещенный в нем мундштук с клещевой головкой, механизм вращения мундщтука, выполненный в виде электродвигателя и планетарного редуктора, а также механизм торможения мундщтука в виде щаонирно установленных на корпусе хоботе, связанных между собой тягой и подпружиненных относительно нее двух рычагов с тормозными колодками, охватывающими корпус планетарного редуктора 1.
К недостаткам известного хобота относятся недолговечность и ненадежность его работы.
С этой целью, в хоботе ковочного манипулятора, содержащем корпус, размещенный в нем мундщтук с клещевой головкой, механизм вращения мундщтука, выполненный Б виде электродвигателя и планетарного редуктора, а также механизм торможеиия мундщтука в виде щарнирно установленных на корпусе хобота, связанных между собой тягой и подпружиненных относительно нее двух рычагов с тормозными колодками, охватывающими корпус планетарного редуктора, механизм торможения мундштука снабжен связанным с тягой силовым цилиндром с системой управления в виде управляемого электромагнитами гидрораспределителя и электроконтактного манометра, электрически связанного с электромагнитами гидрораспределителя.
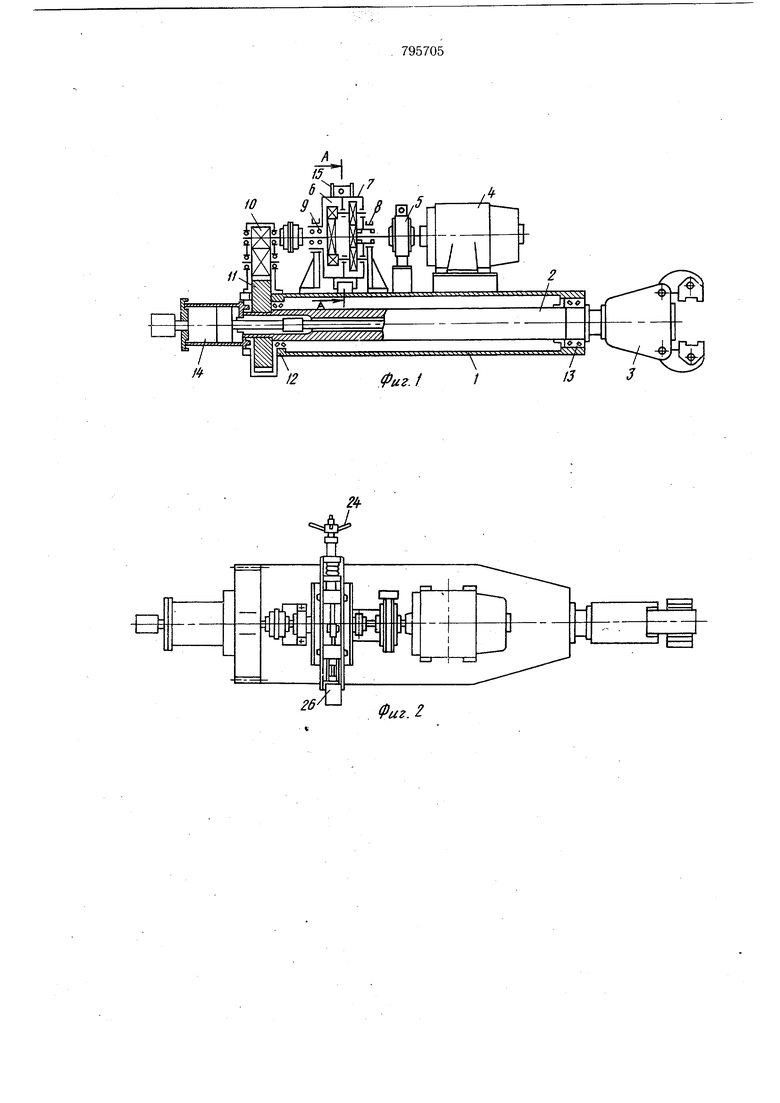
На фиг. 1 изображен хобот ковочного манипулятора, общий вид, продольный разрезу на фиг. 2 - то же, вид в плане; на фиг. 3 - разрез А-А на фиг. 1.
Хобот ковочного манипулятора содержит корпус 1, размещенный в нем мундщтук 2 с клещевой головкой 3. Механизм вращения мундщтука 2 состоит из электродвигателя 4, соединительной муфты 5, планетарного редуктора 6 с цилиндрическим корпусом 7 и опорными цапфами 8 и 9. Вращение от планетарного редуктора на мундщтук передается за счет зубчатой Передачи 10, зубчатое колесо 11 которой закреплено посредством щпонки на мундщтуке 2 хобота, имеющем
опоры 12 и 13 в корпусе 1. Привод клещевой головки осуществляется от силового цилиндра 14. Механизм торможения мундштука выполнен в виде тормозных колодок 15, общитых фрикционным материал ом 16 и закрепленных на рычагах 17, щарнирно установленных на траверсах 18, соединенных между собой тягой 19, пропущенной через отверстия, выполненные в траверсах 18. На консоли тяги установлены пружина 20, смонтированная между стаканами 21 и 22 и нажимная с резьбой втулка 23, перемещаемая вручную щтурвалом 24. С другой стороны тяги на шпильках 25 закреплен однополостной гидроцилиндр 26, шток 27 которого жестко связан с тягой 19. Рабочая полость однополостного гидроцилиндра 26 трубопроводом 28 соединена с управляемым обратным клапаном 29. Для распределения потоков рабочей жидкости установлен трехпозиционный пятиходовой распределитель 30, имеющий пять выходных отверстий 31-35 и управляемый электромагнитами 36 и 37. Трубопроводами 38 и 39 гидрораспределитель связан с обратным клапаном 29. Отверстия 31 и 32 соединены с полостями управляемыми обратным клапаном 29. Отверстие 33 трубопроводом 40 соединено со сливным баком 41. Отверстие 34 посредством трубопровода 42 и 43 связано с нагнетательным отверстием 44 насоса 45, всасывающее отверстие 46 которого трубопроводом 47 связано со сливным баком 41. Отверстие 35 трубопроводом 48 соединено с регулятором расхода 49 и через него со сливным баком 41. На трубопроводе 43 установлен предохранительный клапан 50. Для обеспечения автоматической работы системы на трубопроводе 28 установлен электроконтактный манометр 51, например модели ЖМ с двумя контактами, управляющий работой электромагнитов 36 и 37 гидрораспределителя 30. В зависимости от массы и размеров вращаемой заготовки по графику изменения грузовых моментов, в зависимости от геометрических размеров заготовки оператор определяет величину необходимого давления, создаваемого тормозными колодками 15, а следовательно величину давления рабочей жидкости подаваемой в полость гидроцилиндра 26, шток 27 которого снимает пружину 20, устанавливает контактны электроконтактного манометра 51 ь необходимое положение и включает гидравлическую систему в работу.
Рабочая жидкость засасывается насосом 45 из бака 41 и по трубопроводам 43 и 42 в отверстие 34 гидрораспределителя 30, электромагниты 36 и 37 которого включаются в работу посредством электроконтактного манометра 51. Для создания необходимого усилия прижи.ма тормозных колодок жидкость по каналу от отверстия 34 к отверстию 31 гидрораспределителя 30 (положение 1) по трубопроводу. 38
через обратный клапан 29, по трубопроводу 28 поступает в гидроцилиндр 26, шток которого сжимает пружину 20. После достижения необходимого давления электроконтактный манометр 51 переключает гидрораспределитель 30 в нейтральное положение 0. В этом положении рабочая жидкость через распределитель 30 сливается в бак 41 без давления с минимальным потреблением мощности. При падении давления в гидроцилиндре 26, возникающем вследствие утечки
жидкости в цилиндре и обратном клапане, электроконтактный манометр 51 включает гидрораспределитель 30 в положение 1 и рабочая жидкость поступает, как ранее описывалось, в гидроцилиндр 26, компенсируя
потерю давления. Для уменьшения усилия прижима тормозных колодок 15 посредством электроконтактного манометра 51 устанавливается гидрораспределитель 30 в положение П и рабочая жидкость из гидроцилиндра 26 через обратный клапан 29 по трубопроводу 38, по каналу от отверстия 31 к отверстию 35 гидрораспределителя 30, по трубопроводу 48 через дроссель с регулятором расхода 49 сливается бак 41 с заданной скоростью.
Хобот описанной конструкции обладает повышенной долговечностью и надежностью работы, так как обеспечивается возможность дистанционно и автоматически регулировать тормозной момент на корпусе планетарного редуктора, что исключает перегрузки электродвигателя привода, уменьшает износ зубчатых передач, снижает количество ремонтов и простоев.
Формула изобретения
Хобот ковочного манипулятора, содержащий корпус, размещенный в нем мундштук с клещевой головкой, механиз.м вращения мундщтука, выполненный в виде электродвигателя и планетарного редуктора, а также механизм торможения мундщтука в виде щарнирно установленных на корпусе хобота, связанных между собой тягой и подпружиненных относительно нее двух рычагов с тормозными колодками, охватывающими корпус планетарного редуктора, отличающийся тем, что, с целью повыщения долговечности и надежности работы, механизм торможения мундштука снабжен связанным 0 с тягой ,силовым цилиндром с системой управления в виде управляемого электромагнитами гидрораг- ределителя и электроконтактного манометра, электрически связанного с электромагнита.ми гидрораспределителя.
Источники информации, принятые во внимание при экспертизе 1. Миронов В. Г. и др. Конструирование кузнечных манипуляторов. М., «-Машиностроение, 1970, с. 17, рис. 16. /4l Фиг. Фиг. f 2
