(54) ЗАХВАТ МАНИПУЛЯТОРА
| название | год | авторы | номер документа |
|---|---|---|---|
| Захватная головка манипулятора | 1986 |
|
SU1342727A1 |
| Захватное устройство | 1985 |
|
SU1296405A1 |
| Установка для правки металлоконструкций | 1978 |
|
SU747567A1 |
| Устройство для формования изделий "мюзле | 1977 |
|
SU751485A1 |
| Самоцентрирующий патрон | 1981 |
|
SU952456A1 |
| Станок для соединения витков двухплоскостных спиралей скобами | 1988 |
|
SU1549644A1 |
| Устройство для правки длинномерного материала | 1990 |
|
SU1784337A1 |
| Устройство для подачи бортовых крыльев к барабану для сборки покрышек пневматических шин | 1979 |
|
SU845345A1 |
| Устройство для подачи листовых заготовок в рабочую зону пресса | 1991 |
|
SU1777569A3 |
| Способ изготовления теплообменников и стан для его осуществления. Устройство для передачи длинномерных изделий на обработку. Трубогибочная машина | 1981 |
|
SU1011322A1 |

1
Изобретение относится к машиностроению и может быть использовано в манипуляторах, применяемых, напримёр, для выполнения монтажно-сбороч- j ных, подъемно-транспортных и технологических операций.
Известен захват, содержащий корпус, привод в виде силового цилиндра, на штоке которого смонтирована jg двусторонняя рейка, связанная шестерней с рычагами, несущими зажимные элементы 1.
Известный захват не обеспечивает возможности настройки зажимных зле- 15 ментов на захват деталей различных диаметров (при одном и том же ходе поЕчиня силового цилиндра) , что снижает его технологические возможности.
Цель изобретения - расширение тех-20 нологических возможностей.
Поставленная цель достигается тем, что захват манипулятора, содержащий корпус, привод в виде силового цилиндра, на штоке которого смон- 25 тирована двусторонняя .рейка, связанная шестернями с рычагами., несущими зажимные элементы, снабжен шарнирно смонтированными в корпусе и шарнирно связанными с рычагами экс- 30
центриковыми валками с дополнительными шестернями, зацепляющимися с рейками, причем в варианте исполнения на валиках смонтированы эксцентриковые втулки, а рычаги ,установлены на этих втулках.
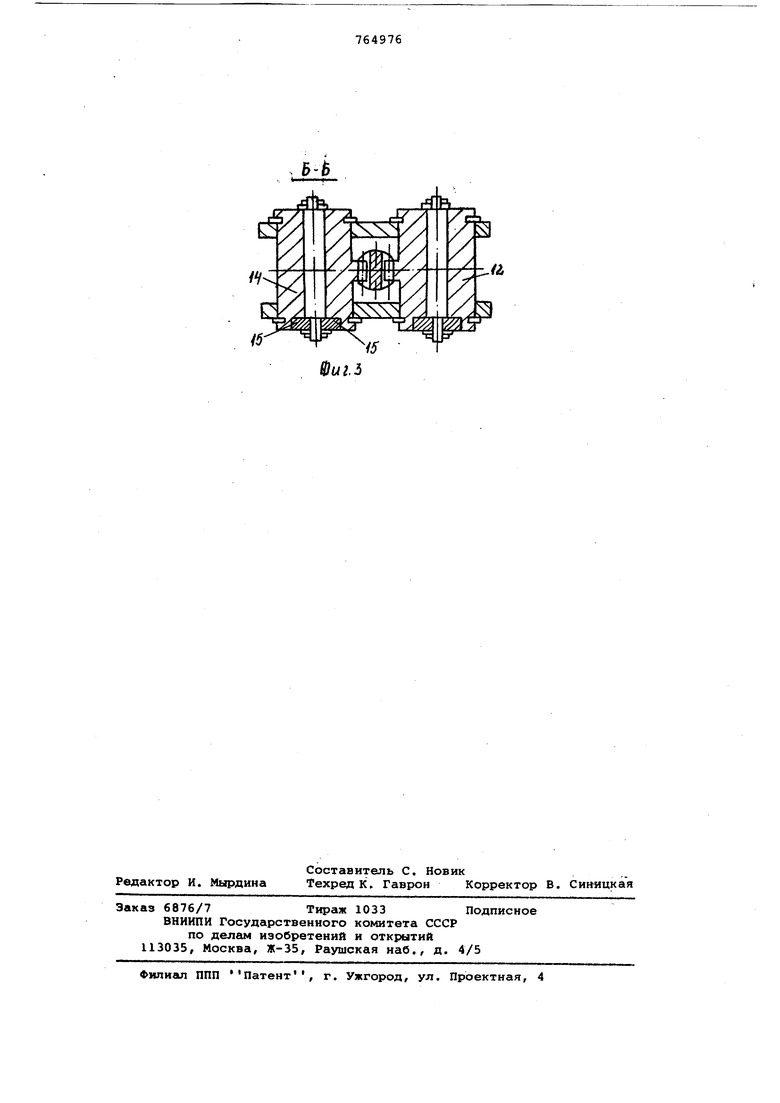
На фиг. 1 показан продольный разрев захвата манипулятора; на фиг. 2 разрез А-А на фиг. 1; на фиг. 3 разрез Б-Б на фиг. 1.
В корпусе 1 установлены валики 2, на которых на шпонках 3 сидят шестерни 4, валики имеют эксцентриковые шейки 5, входящие в пазы рычагов б.
Для расширения диапазона диаметров изделий на эксцентриковых шейках 5 устанавливаются эксцентриковые втулки 7, входящие в пазы рычагов 6. Втулки 7 связаны с градуированными лимбами 8.
Рычаги б снабжены зажимными элементами 9 для зажима изделий 10. На корпусе 1 смонтирован силовой цилиндр 11, на штоке которого смонтирована двусторонняя рейка 12.
На осях 13, связанных с корпусом 1, установлены дополнительные шестерни 14, в которых выполнены продольные пазы 15, ширина которых соответствует ширине зажимных рычагов 6 и допускает их относительное перемещение. Шестерни 14 входят в зацепление с рейкой 12,
Захват манипулятора работает следующим образом.
В исходном положении рейка 12 выдвинута относительно корпуса 1. При этом, рычаги 6 разведены для захвата изделий. При перемещении штока рейки 12 поворачиваются шестерни 4 и 14, которые приводят в движение рычаги б. Рычаги б перемещаются в пазах 15 шестерни 14 и совершают при этом сложное движение, обусловленное перемещением эксцентриковой шейки 5 валика 2. При этом зажимные элементь 9 зажима- ют изделие 10, сохраняя постоянным размер о. независимо от диаметра 10..
При изменении диапазона диаметров изделий необходимо установить лимбы 8 совместно с втулками 7 относительно валиков 2 так, чтобы юс взаимное расположение выбирало величину коррекции, необходимую для захвата заданных изделий 10. .
Использование захвата обеспечивает повышение производительности путем исключения времени на перестройку программы манипулятора и автсйда™ тнческой лиуни, оснащенной манипулятором при переходе на обработку,
либо сборку изделий различных диг1Метров.
Повышение точности сохранения положения оси изделия четко обеспечивает повышение производительности обработки и точности обработанных изделий.
Формула изобретения
1,Захват манипулятора, содержащий корпус, привод в виде силового цилиндра,на штоке которого сьюнтирована двусторонняя рейка, связанная шестернями с рычагами, несущими зажимные элементы, отличаювдийс я тем, что, с целью расяяирения технологических возможностей, он снабжен шарнирно смонтироаавяыми в корпусе и шарнирно связаинШ1й с i jчагами эксцентриковьши валиками с шестернями, зацеплянвдимися с упомя нутой рейкой.
Источники информации, принятые во внимание при экспертизе 1. Авторское свидетельство СССР
№ 632547, кл. В 23 Q 7/04, 26.05.77.
