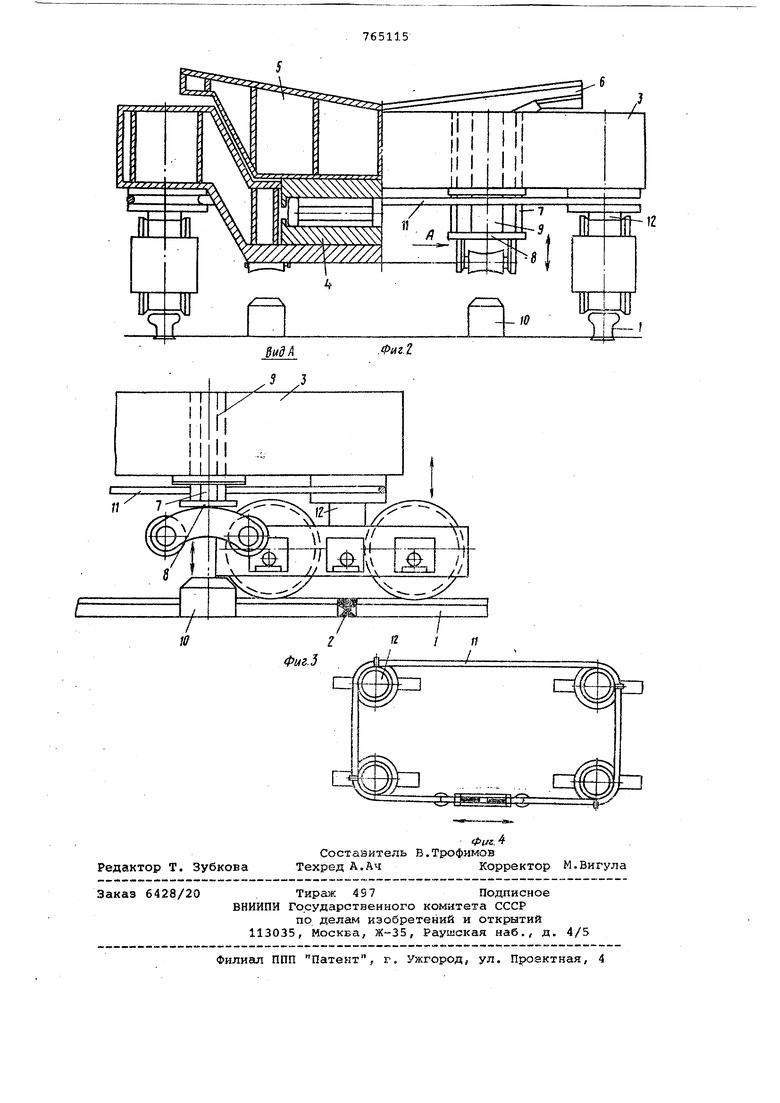
Изобретение относится к судостроению и судоремонту, а именно к транспортирующим устройствг1М лля крупногггбаритных и тяжеловесных грузов. Известна рельсовая судовая тележка, содержащая грузовую платфорь у и гидропривод в виде горизонтального гидроломкрата двойного действия Щ . Недостатком указанного устройства является невоз.можносгь гзмэн&ния на правления даиженкя судовозных тележек. Наиболее близким техническим реше нием 1C предлагаемоГГу является транспортирующее устройстве для крупногабаритных и тяжеловесных грузов, содержащее ;.асси, подъемно-опускные рамы с гидродомкратамч, опиравшиеся через вилки на катки с притзодом,пере метающиеся по рельсовому пути 2. Недостаток этого устройства закл чается в том, что во время разворота судна в горизонтальной плоскости вок руг вертикальной оси при переводе его на двух подъемно-опускных имеют место переменные скорости их одновременнсл-о движения по набораг-i разных путей, что ведат к перегруз,кам и выходу из строя приводов к недопустиьмм деформациям корпуса. Другим недостатком является сложность точного и одновременного разворота шасск с колесами при переводе каждой подъемно-опускной рамы на пересебающие пути. Цель изобретения - исключение деформаций корпуса судна, перегрузок и выхода из строя приводов во время . разворота судна в горизонтальной плоскости вокруг вертикальной оси при переводе на пересекающие рельсовые пути на двух подъемно-опускных рамах. Указанная цель достигается тем,что устройство снабжено гибкой связью,выполненной в виде троса, канифас-блоком и неподвижным роликовым блоком, установленным на пересечении рельсовых путей, причем каждая подъемно-опускная рама оборудована тросовым органом поворота шасси, выполненным в виде замкнутого приводного троса, охватывающего шасси с возможностью их одновременного и точного поворота на заданный угол до 90®, при этом подъемно-опускные рамы соединены гибкой связью, заведенной от одной рамы через неподвижный роликовый блок, канифас-блок, снабженный тяговым орга ном, на другую раму. На фиг. 1 изображено предлагаемое устройство с судном, общий вид (несколько положений)/ на фиг. 2 - тра портируквдее устройство; на фиг. 3 вид по стрелке А на фиг. 2; на фиг. 4 - схема тросового органа поворота шасси. Транспортирующее устройство состоит из железнодорожных перпёндикулярно пересекающихся путей 1 и 2, двух подъемно-опускных рам 3, снабженных поворотными опорами 4 с шарнирно установленными в них траверса ми 5 с боковыми коническими приливами б, выступающими над опорными поверхностями подъемно-опускных рам выдвижными фиксирующими стойками 7, связанными через пластины 8 с гидродомкратами 9, опирающимися на опоры 10, и тросовым органом поворота в виде замкнутого приводного троса 11 (привод на чертеже не показан), охватьлвающего и закрепленного на шасси 12 с возможностью их одновременного и точного поворота на заданный угол до 90°, а также гибкой связи, выполненной в виде троса 13, соединяющей носовую и кормовую подъемноопускные рамы 3 через канифас-блок 14 с тяговым органом, например, лебедкой, причем указанный трос огибает неподвижно установленный на пересечениях путей 1 и 2 роликовый блок 15. Транспортирующее устройство работает следующим образом. Подъемноопускные рамы 3 заводят в установленной последовательности под судно в заданное положение, судно устанав ливают и ориентируют на траверсах 5 с боковыми приливами 6. Затем судно перемещают по железн дорожному пути 1 до пересечения с железнодорожным путем 2 и устанавли вают так, чтобы оси шасси 12 носовой подъемно-опускной рамы 3 точно совпали с осями рельсов пересекающе го пути 2, и гидродомкратами 9 подн мают над рельсами, фиксируя по верт кали выдвижными фиксирующими стойка ми 7. После этого с помощью приводного троса 11 производят одновременный и точный поворот шасси 12 на пересекающие пути 2, что обеспечивает возможность разворота судна на пово ротных опорах 4 в горизонтальной плоскости вокруг вертикальной оси и относительно носовой и кормовой подъемно-опускных рам 3 за счет их одновременного и взаимосвязанного движения по разным наборам путей 1 и 2. Для этого подъемно-олускные рамы 3 соединяют тросом 13 через канифас-блок 14 и неподвижный роликовый блок 15 с дополнительным тяговым органом, например, лебедкой с определенным тяговЕдм усилием. Применение такой гибкой тросовой связи с дополнительным тяговьм органом обеспечивает автоматическое регулирование скоростей одновременного движения подъемно-опускньах рам 3 по разным наборам путей 1 и 2, исключающее перегрузки приводов и опасные : деформации корпуса судна при развороте его вокруг вертикальной оси на пересекающие пути за счет возможности дополнительного движения троса 13 относительно канифас-блока 14 в зависимости от угла поворота судна относительно пересекающихся путей 1 и 2. В первоначальный период до угла 40° разворот судна на поворотных опорах 4 при постоянной работе лебедки осуществляется в основном за счет движения носовой подъемно-опускной рамы 3 с постепенным ускорением движения кормовой в зависимости от тяговых усилий и дополнительного движения троса 13 относительно канифасблока 14 по часовой стрелке. При угле поворота 40-50° скорость движения обеих подъемно-опускных рам 3 одинаковая и т.рос 13 не меняет своего положения относительно канифасблока 14. При угле поворота свыше 50 разворот судна осуществляется в основном за счет движения кормовой подъемно-опускной рамы 3 с постепенным замедлением скорости движения носовой в зависимости от тяговых усилий и дополнительного движения троса 13 относительно канифас-блока 14 против часовой стрелки. После совмещения осей шасси кормовой подъемно-опускной рамы 3 с осями рельсов пересекающего пути 2 повторяют операцию подъема судна над рельсами для разворота ее шасси 12 на набор пути 2. Экономический эффект от внедрения изобретения обеспечивается за счет повышения Нсщежности работы приводов , обусловленного отсутствием перегрузок, а также упрощения конструкции. Формула изобретения Транспортирующее устройство для крупногабаритныя и тяжеловесньос грузов, преимущественно судов, содержащее шасси, подъемно-опускные рамы с гидродомкратами, опирающиеся через вилки на катки с приводом, перемещающиеся по рельсовому пути, отличающиеся тем, что, с целью исключения деформации корпуса судна, перегрузок и выхода из строя приводов во время разворота судна в горизонтальной плоскости вокруг вертикальной оси при переводе на пересекающие рельсовые пути на двух подъемно-опускных рамах, оно снабжено гибкой связью, выполненной в виде троса, канифас-блоком и неподвижным роликовым блоком, установленным на пересечении рельсовых путей, причем каждая подъемно-опускная рама оборудована тросовым органом поворота шасси , выполненным в виде замкнутого приводного троса, охватывающего шасси с возможностью их одновременного и точного поворота на эгщанный угол до 90 ° , при этом подъемно-опускные рама соединены гибкой связью, заведенной от одной рамы через неподвижный роликовый блок, канифас-блок, снабженный тяговым органом, на другую раму.
Источники информации, принятые во внимание при экспертизе
1.Авторское свидетельство СССР
180971, кл. В 63 С 13/00, 22.06,64.
2.Авторское свидетельство СССР
№ 414146, кл. В 61 D 15/00, 22.05.72, (прототип).

| название | год | авторы | номер документа |
|---|---|---|---|
| Слип наплавного типа для судна | 1986 |
|
SU1373627A1 |
| ВЕРТИКАЛЬНЫЙ КАНАТНЫЙ СУДОПОДЪЁМНИК | 2021 |
|
RU2778183C1 |
| Установка для спуска судов | 1981 |
|
SU986822A1 |
| Судно-носитель для транспортировки морской платформы со строительной площадки на место эксплуатации | 1980 |
|
SU925751A1 |
| СПОСОБ СООРУЖЕНИЯ ПРОЛЕТНОГО СТРОЕНИЯ ВАНТОВОГО МОСТОВОГО ПЕРЕХОДА ЧЕРЕЗ МОРСКОЙ СУДОХОДНЫЙ ПРОЛИВ | 2015 |
|
RU2612050C1 |
| Способ изготовления внутреннего отверстия в трубе при помощи расточного устройства | 2024 |
|
RU2839745C1 |
| ШАССИ МОБИЛЬНОГО ТРАНСПОРТНОГО ОБОРУДОВАНИЯ | 2004 |
|
RU2291811C2 |
| Судно для перевозки лихтеров и грузов | 1982 |
|
SU1063701A1 |
| ОСНАЩЕНИЕ ДЛЯ МОНТАЖА ТЯЖЕЛОГО СУДОВОГО ОБОРУДОВАНИЯ И СПОСОБ МОНТАЖА | 2014 |
|
RU2553487C1 |
| БУКСИРУЕМЫЙ ПОДВОДНЫЙ АППАРАТ | 2010 |
|
RU2419574C1 |
CnijCKoSoe устрпйство
