(54) ГРЕЙФЕРНЫЙ ПИТАТЕЛЬ
| название | год | авторы | номер документа |
|---|---|---|---|
| Запорный механизм автоматического контрольного пункта для прохода пассажиров | 1982 |
|
SU1062739A1 |
| Устройство для затяжки и открытия контактных зажимов алюминиевых электролизеров | 1978 |
|
SU751841A1 |
| Зубчато-рычажное устройство | 1982 |
|
SU1087723A1 |
| Грейферный перекладчик к штамповочному прессу | 1983 |
|
SU1159699A1 |
| УКЛАДОЧНЫЙ АГРЕГАТ | 1968 |
|
SU210738A1 |
| Питатель | 1976 |
|
SU652257A1 |
| и ЗАПЕЧАТЫВАНИЯ ПАКЕТОВ ИЗ ЛЕНТОЧНОГО |Ий1:-н :. .. УПАКОВОЧНОГО МАТЕРИАЛА| BilBJlHCTEKA::"!-''Др1;., .•SsftlJl | 1973 |
|
SU378358A1 |
| УСТРОЙСТВО для ЗАГРУЗКИ и ВЫГРУЗКИ ТЕРМИЧЕСКИХ ПЕЧЕЙ | 1973 |
|
SU364557A1 |
| Уравновешивающий подъемник | 1985 |
|
SU1271818A1 |
| Устройство для автоматической смазки роликов спекательных тележек агломерационных машин | 1984 |
|
SU1245834A1 |


1
Изобретение относится к автоматизации технологических процессов в машиностроении.
Известен грейферный питатель, содержащий рабочий орган, механизм вертикального перемещения, выполненный в виде четырехщарнирного параллелограмма, и механизм горизонтального перемещения с приводом от кулачков 1.
В известном устройстве рабочий орган совершает плоскопараллельное движение по замкнутому контуру за счет использования механизмов горизонтального и вертикального перемещений, каждый из которых связан непосредственно с рабочим органом, причем связь механизма вертикального или горизонтального перемещений с рабочим органом осуществляется с применением поступательных пар ползун-направляющая
Применение поступательных пар усложняет конструкцию грейферного питателя.
Недостатком известного устройства является возможность попадания стружки в зону сопряжения поверхностей поступательных пар.
Цель изобретения - упрощение конструкции и повыщение надежности устройства
заменой поступательных пар привода на вращательные.
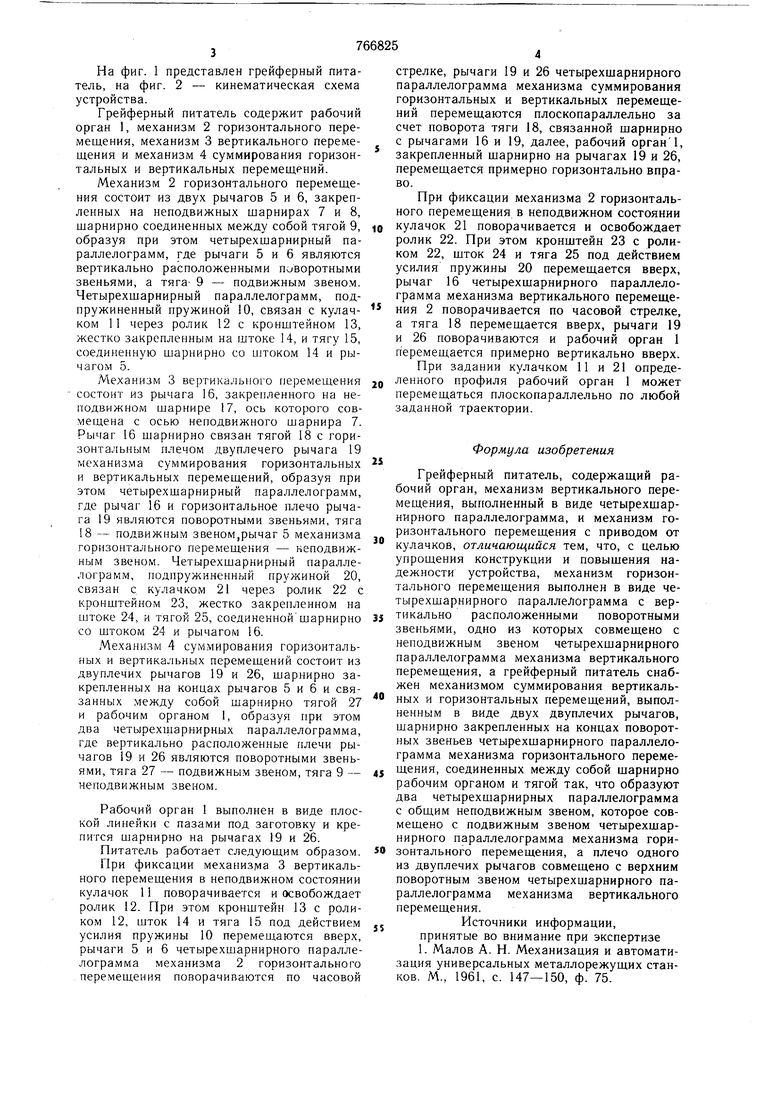
Указанная цель достигается тем, что механизм горизонтального перемещения выполнен в виде четырехщарнирного параллелограмма с вертикально расположенными поворотными звеньями, одно из которых совмещено с неподвижным звеном четырехшарнирного параллелограмма механизма вертикального перемещения, а грейферный питатель снабжен механизмом суммирования вертикальных и горизонтальных перемещений, выполненным в виде двух двуплечих рычагов, шарнирно закрепленных на концах поворотных звеньев четырехшарнирного параллелограмма механизма горизонтального перемещения, соединенных между собой шарнирно рабочим органом и тягой так, что образуют два четырехщарнирных параллелограмма с общим неподвижным звеном, которое совмещено с подвижным звеном четырехщарнирного параллелограмма механизма горизонтального перемещения а плечо одного из двуплечих рычагов совмещено с верхним поворотным звеном четырехшарнирного параллелограмма механизма вертикального перемещения. На фиг. 1 представлен грейферный питатель, на фиг. 2 - кинематическая схема устройства. Грейферный питатель содержит рабочий орган 1, механизм 2 горизонтального перемещения, механизм 3 вертикального перемещения и механизм 4 суммирования горизонтальных и вертикальных перемещений. Механизм 2 горизонтального перемещения состоит из двух рычагов 5 и 6, закрепленных на неподвижных щарнирах 7 и 8, щарнирно соединенных между собой тягой 9, образуя при этом четырехщарнирный параллелограмм, где рычаги 5 и 6 являются вертикально расположенными поворотными звеньями, а тяга- 9 - подвижным звеном. Четырехщарнирный параллелограмм, подпружиненный пружиной 10, связан с кулачком 1 через ролик 12 с кронщтейном 13, жестко закрепленным на штоке 14, и тягу 15, соединенную щарнирно со штоком 14 и рычагом 5. Механизм 3 вертикального Г1еремещения состоит из рычага 16, закрепленного на неподвижном шарнире 17, ось которого совмещена с осью неподвижного шарнира 7. Рычаг 16 щарнирно связан тягой 18 с горизонтальным плечом двуплечего рычага 19 механизма суммирования горизонтальных и вертикальных перемещений, образуя при этом четырехщарнирный параллелограмм, где рычаг 16 и горизонтальное плечо рычага 19 являются поворотными звеньями, тяга 18 - подвижным звеном,рычаг 5 механизма горизонтального перемещения - неподвижным звеном. Четырехщарнирный параллелограмм, подпружиненный пружиной 20, связан с кулачком 21 через ролик 22 с кронщтейном 23, жестко закрепленном на штоке 24, а тягой 25, соединеннойщарнирно со щтоком 24 и рычагом 16. Механизм 4 суммирования горизонтальных и вертикальных перемещений состоит из двуплечих рычагов 19 и 26, щарнирно закрепленных на концах рычагов 5 и 6 и связанных между собой щарнирно тягой 27 и рабочим органом 1, образуя при этом два четырехщарнирных параллелограмма, где вертикально расположенные плечи рычагов 19 и 26 являются поворотными звеньями, тяга 27 - подвижным звеном, тяга 9 - неподвижным звеном. Рабочий орган 1 выполнен в виде плоской линейки с пазами под заготовку и крепится шарнирно на рычагах 19 и 26. Питатель работает следующим образом. При фиксации механизма 3 вертикального перемещения в неподвижном состоянии кулачок 11 поворачивается и освобождает ролик 12. При этом кронщтейн 13 с роликом 12, щток 14 и тяга 15 под действием усилия пружины 10 перемещаются вверх, рЕ 1чаги 5 и 6 четырехшарнирного параллелограмма механизма 2 горизонтального перемещения поворачиваются по часовой стрелке, рычаги 19 и 26 четырехшарнирного параллелограмма механизма суммирования горизонтальных и вертикальных перемещений перемещаются плоскопараллельно за счет поворота тяги 18, связанной щарнирно с рычагами 16 и 19, далее, рабочий орган1, закрепленный щарнирно на рычагах 19 и 26, перемещается примерно горизонтально вправо. При фиксации механизма 2 горизонтального перемещения в неподвижном состоянии кулачок 21 поворачивается и освобождает ролик 22. При этом кронштейн 23 с роликом 22, щток 24 и тяга 25 под действием усилия пружины 20 перемещается вверх, рычаг 16 четырехщарнирного параллелограмма механизма вертикального перемещения 2 поворачивается по часовой стрелке, а тяга 18 перемещается вверх, рычаги 19 и 26 поворачиваются и рабочий орган 1 перемещается примерно вертикально вверх. При задании кулачком 11 и 21 определенного профиля рабочий орган 1 может перемещаться плоскопараллельно по любой заданной траектории. Формула изобретения Грейферный питатель, содержащий рабочий орган, механизм вертикального перемещения, выполненный в виде четырехщарнирного параллелограмма, и механизм горизонтального перемещения с приводом от кулачков, отличающийся тем, что, с целью упрощения конструкции и повыщения надежности устройства, механизм горизонтального перемещения выполнен в виде четырехщарнирного параллелограмма с вертикально расположенными поворотными звеньями, одно из которых совмещено с неподвижным звеном четырехщарнирного параллелограмма механизма вертикального перемещения, а грейферный питатель снабжен механизмом суммирования вертикальных и горизонтальных перемещений, выполненным в виде двух двуплечих рычагов, щарнирно закрепленных на концах поворотных звеньев четырехщарнирного параллелограмма механизма горизонтального перемещения, соединенных между собой щарнирно рабочим органом и тягой так, что образуют два четырехщарнирных параллелограмма с общим неподвижным звеном, которое совмещено с подвижным звеном четырехшарнирного параллелограмма механизма горизонтального перемещения, а плечо одного ИЗ двуплечих рычагов совмещено с верхним поворотным звеном четырехшарнирного параллелограмма механизма вертикального перемещения. Источники информации, принятые во внимание при экспертизе 1. Малов А. Н. Механизация и автоматизация универсальных металлорежуших станков. М., 1961, с. 147-150, ф. 75.
фиг./
25 22 2
