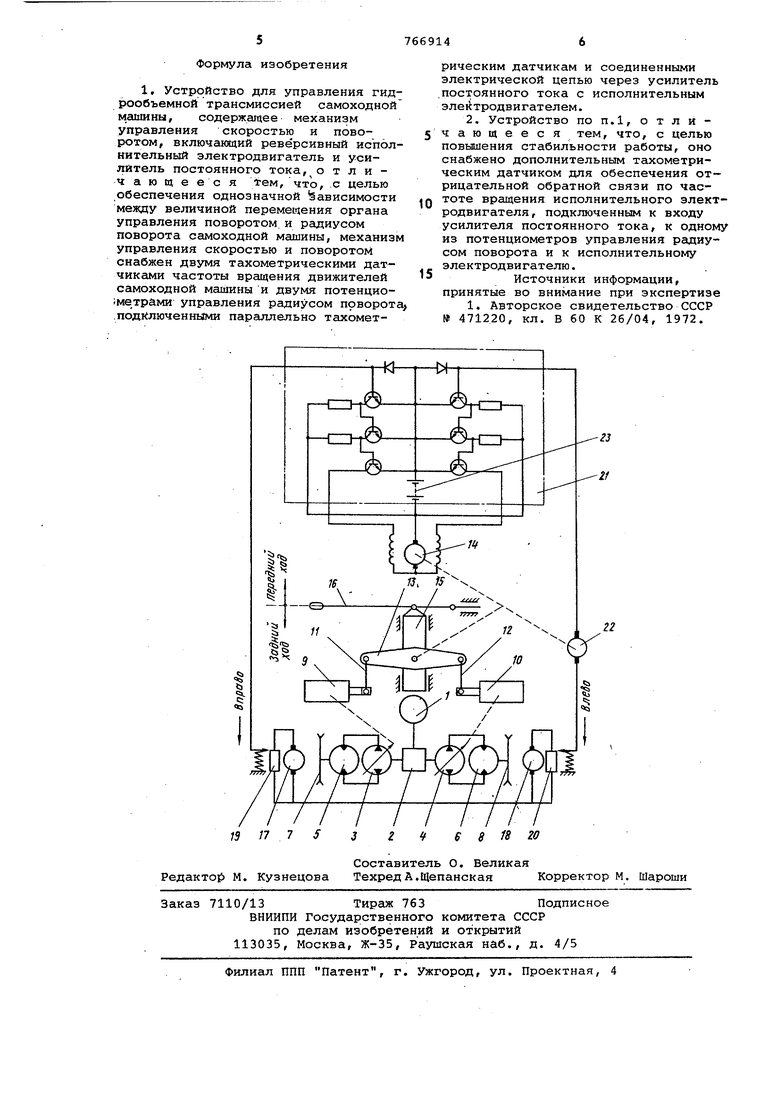
Двигатель 1 внутреннего сгорания через редуктор 2 соединен с насосами 3 и 4, которые гидравлически связаны соответственно с гидромоторами 5 и б. Гидромотор 5 связан с левым движителем 7, а гидромотор б - с правым движителем 8, Входные звенья механизмов 9 и 10 изменения производительности насосов 3 и 4, посредством тяг 11 и 12 соединены с поворотным рычагом 13, установленным на валу реверсивного исполнительного электродвигателя 14.
Исполнительный электродвигатель 14 закреплен на ползуне 15, щарнирно связанном с рычагом 16 управления скоростью. С валами гидромоторов 5 и б соединены тахометрические датчики 17 и 18 постоянного тока, электрической цепью связанные с потенциометрами 19 и 20 управления радиусом поворота. Движки потенциометров 19. и 20 электрической цепью связаны с входом усилителя постоянного тока 21 и тахометрическим датчиком 22 постоянного тока, соединенньм с валом исполнительного электродвигателя 14, который подключен к выходу усилителя постоянного тока 21. Питание электрической схемы осуществляется от аккумуляторной батареи 23 машины.
В режиме прямолинейного движения машины устройство работает следующим образом.
При перемещении рычага 16 происходит синхронное перемещение входных звеньев механизмов 9 и 10 изменения производительности насосов 3 и 4. Пр этом происходит синхронное изменение скорости движителей 7 и 8 В пределах от максимальной переднего хода, до масимальной заднего хода. Валы гидромоторов 5 и б вращаются с одинаковой частотой, напряжения на тахометрических датчиках 17 и 18 и потенциометрах 19 и 20 одинаковы, на входе усилителя постоянного тока. 21 отсутсвует упра.вляющее напряжение, величина и полярность которого определяютс разностью напряжений на движках потенциометров 19 и 20f которые находятся в верхнем по схеме положении. Вал исполнительного электродвигателя 14 неподвижен и поворотный рычаг 13 находится в нейтральном (горизонтальном по схеме) положении.
При выполнении поворота ма.шины, например- влево необходимо переместить движок потенциометра 20 вниз по схеме на величину, зависящую от требуемо1о радиуса поворота. При этом напряжение на движке потенциометра 20 уменьшится по сравнению с напряжением на потенциометре 19 и на входе усилителя постоянного тока 2,1 появится управляющее напряжение, полярность которого вызовет вращение исполнительного электродвигателя 14 и поворот рычага 13 против часовой стрелки по схеме, если гидромоторы вращаются в направлении переднего хода машины, или по часовой стрелке при вращении гидромоторов в направлении заднего хода. Поворот рычага 13 вызовет увеличение производительности насоса 4 и одновременное уменьшение производительности насоса 3, что обеспечивает поворот машины влево. Поворот рычага 13 бу:Дет происходить до тех пор, пока
0 напряжения на движках потенциометров 19 и 20 станут равными между собой за счет увеличения напряжения на тахометрическом датчике 18 и одновременного уменьшения напряжения
5 на тахометрическом датчике 17, при этом установится определенный радиус поворота. Если при этом изменить скорость машины с помощью рычага 16,.на входе усилителя постоянного тока 21
Q вновь появится управляющее напряжение необходимой полярности, исполнительный электродвигатель 14 скорректирует положение рычага 13 и радиус поворота восстановится. При возвращении движка потенциометра 20 в исходное (верхнее по схеме) положение . вновь восстановится прямолинейное движение машины. В случае поворота вправо работа устройства аналогична описанной, но требуемый радиус поворота задается движком потенциометра 19.
Таким образом, независимо от скорости и направления движения машины устройство будет поддерживать постоянство отношения напряжений тахометрических датчиков 17 и 18 (скоростей движителей 7 и 8), задаваемое движками потенциометров 19 или 20 (в зависимости от направления повоQ рота), что и требуется для обеспечения постоянного ралиуса поворота.
Для, повышенияГ стабильности работы устройства в него введена отрицательная обратная связь по частоте вращения исполнительного электродвигателя 14, осуществляемая с помощью тахометрического датчика 22 постоянного тока. При этом частота вращения электродвигателя 14 строго пропорциональна величине управляющего напряжения .на входе усилителя постоянного тока 21. Чем значительнее отклонение фак ического радиуса поворота от заданного, тем быстрее произойдет восста1Г новление последнего.
Применение данного изобретения на гусеничных тракторах с гидрообъемными трансмиссиями упростит и облегчит управление трактором, что обеспечит увеличение производительности труда. Наиболее эффективно применение предлагаемого устройства в сочетании с автоматическим управлением скоростьюмашины, а также при дистанционном управлении машиной. /
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для моделирования динамики движения гусеничной машины | 1980 |
|
SU940186A2 |
| СПОСОБ УПРАВЛЕНИЯ И ОЦЕНКИ ПАРАМЕТРОВ СЕЛЬСКОХОЗЯЙСТВЕННОГО АГРЕГАТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1990 |
|
RU2021654C1 |
| УСТРОЙСТВО для УПРАВЛЕНИЯ ДВИГАТЕЛЕМ | 1967 |
|
SU202741A1 |
| Масштабно-дистанционная фотокопировальная система | 1955 |
|
SU121164A1 |
| Система управления транспортного средства | 1985 |
|
SU1311954A1 |
| Способ определения усилия прижима короснимателей роторного стволообрабатывающего станка | 1977 |
|
SU670435A1 |
| Барабанно-лопастная погрузочная машина | 1981 |
|
SU1041705A1 |
| Нитеподающее устройство с электронным регулированием натяжения нити | 1987 |
|
SU1727535A3 |
| Устройство для управления положением шагающего экипажа | 1977 |
|
SU765094A1 |
| Способ настройки вентильного электродвигателя | 1989 |
|
SU1774439A1 |
