Звенья подьегиной штанги выполенены в виде хзвеньев цепи, снабженны втулкой и валиком, причем звенья якорно цепи соединены между собой втулкой для выдвижного грузового пальца.
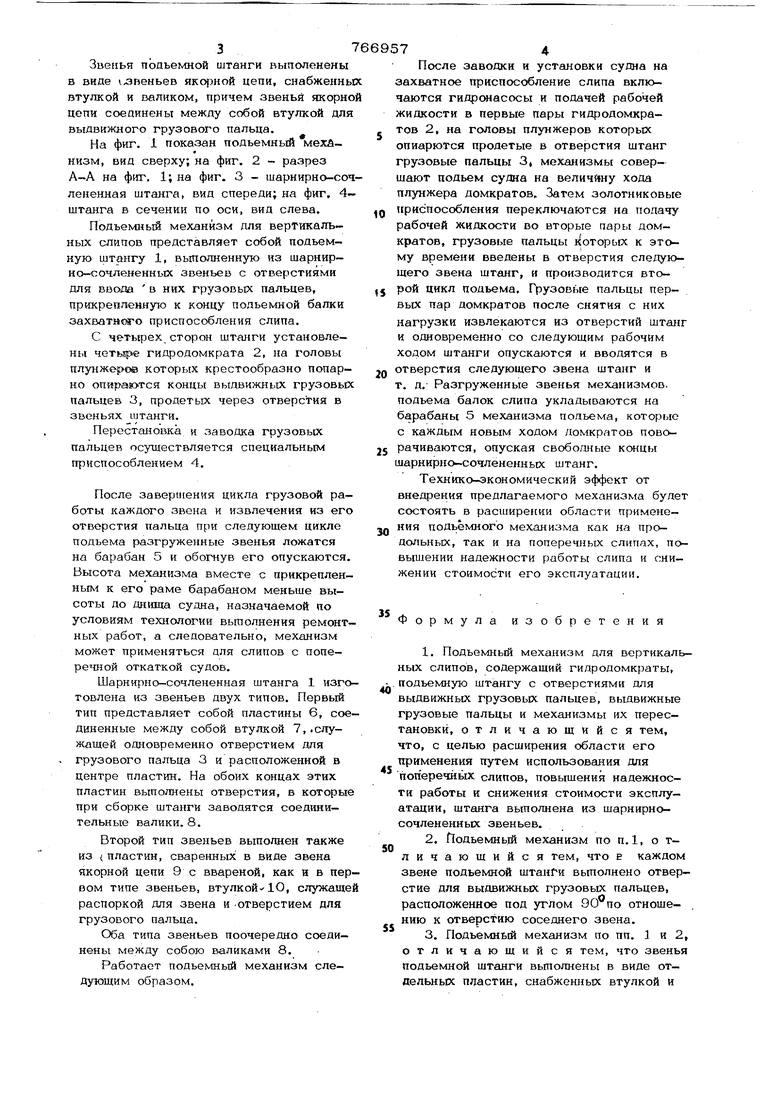
На фиг. 1 показан подъемный механизм, вид сверху, на фиг. 2 - разрез А-А на фиг. 1; на фиг. 3 - шарнирно-сочлененная штанга, вид спереди; на фиг. 4штанга в сечении по оси, вид слева.
Подъемный механизм для вертикальных слипов представляет собой подъемную штангу 1, вьтолненную из шарнирно-сочлененных звеньев с отверстиями для ввода в них грузовых пальцев, прикрепленную к концу подъемной балки захватного приспособления слипа.
С четырех сторон штанги установлены четыре гидродомкрата 2, на головы плунжеров которых крестообразно попарно опираются концы выдвижньсх грузовых пальцев 3, продетых через отверстия в звеньях штанги.
Перестановка и заводка грузовых пальцев осуществляется специальным приспособлением 4.
После завершения цикла грузовой работы каждого звена и извлечения из его отверстия пальца при следующем цикле подъема разгруженные звенья ложатся на барабан 5 и обогнув его опускаются. Высота механизма вместе с прикрепленным к его раме барабаном меньше высоты до днища судна, назначаемой по условиям технологии выполнения ремонтнъ1Х работ, а следовательно, механизм может применяться для слипов с поперечной откаткой судов.
Шарнирно-сочлененная штанга 1 изготовлена из звеньев двух типов. Первый тип представляет собой пластины 6, соединенные между собой втулкой 7,.служащей одновременно отверстием для грузового пальца 3 и расположенной в центре пластин. На обоих концах этих пластин выполнены отверстия, в которые при сборке штанги заводятся соединительные валики. 8.
Второй тип звеньев выполнен также из ( пластин, свареннъ1Х в виде звена якорной цепи 9 с ввареной, как н в первом типе звеньев, втулкой- Ю, служаще распоркой для звена и -отверстием для грузового пальца.
Оба типа звеньев поочередно соединены между собою валиками 8.
Работает подъемнъй механизм следующим образом.
После заводки и установки судна на захватное Приспособление слипа включаются гидрс«асосы и подачей рабочей жидкости в первые пары гидродомкратов 2, на головы плунжеров которъгх опиарются продетые в отверстия штанг грузовые пальцы 3, механизмы совершают подъем судна на величину хода плунжера домкратов. Затем золотниковые
приспособления переключаются на подачу рабочей жидкости во вторые пары домкратов, грузовые пальцы 1 оторых к этому времени введены в отверстия следующего звена штанг, и производится второй цикл подъема, Грузовьге пальцы первых пар домкратов после снятия с них нагрузки извлекаются из отверстий штанг и одновременно со следующим рабочим ходом штанги опускаются и вводятся в
отверстия следующего звена штанг и т. д.- Разгруженные звенья механизмов, подъема балок слипа укладываются на барабаны 5 механизма подъема, которые с каждым новым ходом домкратов поворачиваются, опуская свободные концы шарнирно-сочлененнъсх штанг.
Технико-экономический эффект от внедрения предлагаемого механизма будет состоять в расширении области примене-
кия подъемного механизма как на продольнъЕХ, так и на поперечных слипах, повышении надежности работы слипа и снижении стоимости его эксплуатации.
Формула изобретения
1.Подъемный механизм для вертикальных слипов, содержащий гидродомкраты, подъемную штангу с отверстиями для выдвижных грузовых пальцев, выдвижные грузовые пальцъ и механизмы их перестановки, отличающийся тем, что, с целью расширения области его применения путем использования для поперечяьос слипов, повышения надежности работы к снижения стоимости эксплуатации, штанга выполнена из шарнирносочлененнък звеньев.
2.Йодьемнъй механизм по п. 1, о тличающийся тем, что Е каждом звене подъемной вътолнено отверстие для выдвижнък. грузовых пальцев, расположенное под углом отношению к отверстию соседнего звена.
3.Подъемный механизм по пп. 1 и 2, отличающийся тем, что звенья Подъемной штанги въгполнены в виде отдельных пластин, снабженных втулкой и
:валшсом, причем пластины соединены между собой втулкой для выдвижного грузового пальца, а звенья штанги поочередно соединены между собой соединительными валиками.
4. Подъемный механизм по пп. 1 и 2, отличающийся - -тем, что звенья подъемной штанги вьтолнены в виде звеньев якорной цепи, снабженных
ной цепи соединены между собой втулкой для выдвижного грузового пальца.
Источники информации, принятые во внимание при экспертизе
1.Авторское свидетельство СХХР N9 389987, кл. В 63 С З/ОО, 22,01.71.
2.Авторское сввдетельство СССР N ЗО4179, кл. В 63 С 3/О6,

| название | год | авторы | номер документа |
|---|---|---|---|
| Вертикальный слип | 1976 |
|
SU641032A1 |
| Продольный слип | 1939 |
|
SU58935A1 |
| Подъемный механизм вертикального судоподъемника | 1988 |
|
SU1523471A1 |
| йСЕСиЮЗНАЯ | 1973 |
|
SU389987A1 |
| ГРУНТОУКЛАДОЧНОЕ ПЛАВУЧЕЕ СРЕДСТВО | 1993 |
|
RU2078711C1 |
| ДВИЖИТЕЛЬ С ГРУЗОВОЙ ПЛАТФОРМОЙ НА ВОЗДУШНОЙ ПОДУШКЕ | 2015 |
|
RU2592754C1 |
| Устройство для разгрузки несамосвальных грузовых автомобилей со сквозным проездом | 1960 |
|
SU146694A1 |
| Подъемный механизм вертикального судоподъемника | 1977 |
|
SU679478A1 |
| Устройство для выпрессовки и запрессовки втулок большого диаметра | 1977 |
|
SU743859A1 |
| ВЫНОСНАЯ ОПОРА ПОДЪЕМНО-ТРАНСПОРТНОГО СРЕДСТВА | 2008 |
|
RU2361806C1 |
А-А
Фиг. 2
7ff 5
5/
X/X/ X X
fput.f
