Предмет изобретения относится к электрическим устройствам для управления механизмами преимущественно электроприводом копировальнофрезерного станка по заранее заданной программе.
Отличительной особенностью предлагаемого устройства является совместное применение контактного и индуктивного датчиков, с целью повышения чистоты и скорости обработки и демпфирования колебаний системы.
На фиг. 1 изображена принципиальная схема индуктивного датчика; на фиг. 2 - схема контактного датчика; на фиг. 3 - скелетная схема всего устройства.
Индуктивный датчик (фиг. 1) состоит из небольшого серводвигателя 6, связанного при помощи винта и гайки с якорями двух независимых диференциальных трансформаторов / и 2. Якори 3 и 4 пртпсреплены к общей поперечине 5, на которой находится гайка винта серводвигателя. Трансформаторы / и 2 предназначены соответственно для управления скоростями У у подач каретки.
Сердечникитрансформаторов
сдвинуты один относительно другого на величину S , поэтому, когда
в положении А, якорь 3 находится якорь 4 находится в положении О, При перемещении якоря 3 в положение О якорь 4
перемещается в
положение В. При этом скорость и j,меняется от максимума до нуля, а V у от нуля до максимзма.
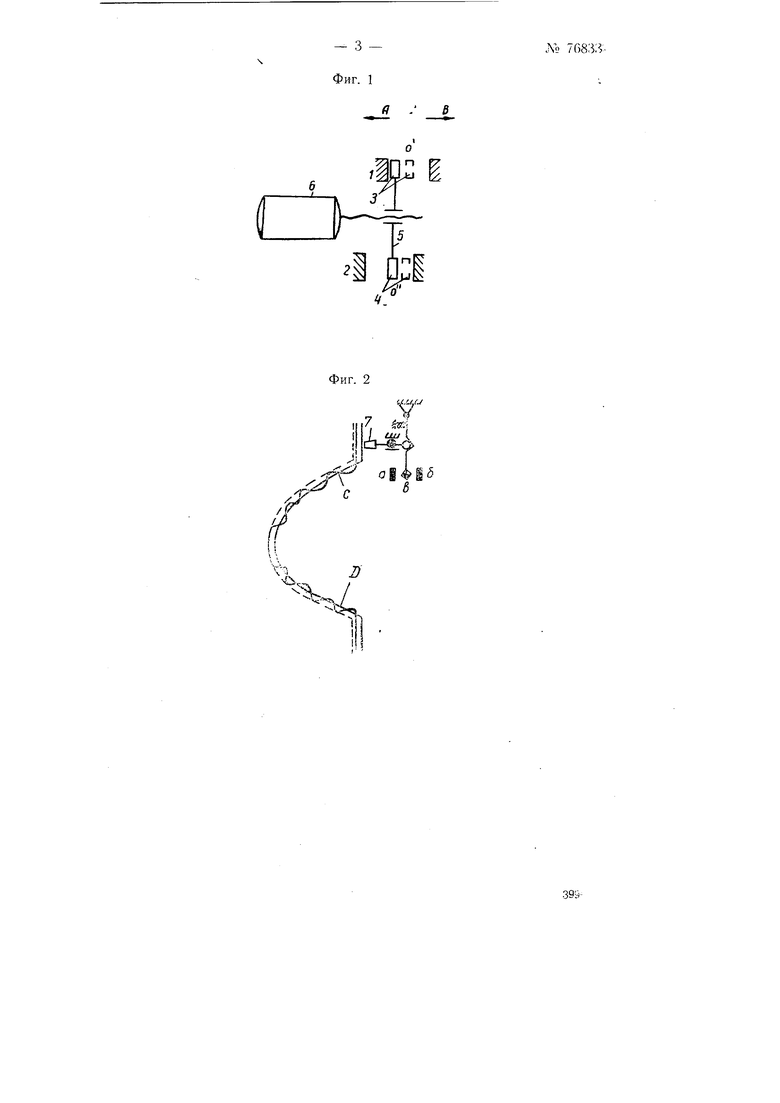
Контактный датчик (фиг. 2) является датчиком обычного типа, который применяется для станков контактного копирования. Он управляет серводвигателем индуктивного через электронно-ус11лительную схему.
При положении контакта в между контактами а и 5 на серводвигатель индуктивного датчика подается напряжение, которое заставляет его перемещать поперечину с якорями в направлении стрелки В (фиг. ). При сонрикоснозении контакта в с одним из контактов а или о серводвигатель перемещает поперечину в направлении стрелки А.
Кроме управления серводвигателем 6, контактный датчик управляет также направлением скорости У.
397
После соприкосновения контактов о и в устанавливается направление движения, сближающее палец 7 с контуром шаблона. Это направление удерживается и после разрыва контактов а и в. Для изменения направления движения требуется соприкосновение контактов б и б. Новое направление удерживается в свою очередь до соприкосновения контактов а и 0.
В исходном положении при пуске станка контакт в касается контакта а (под воздействием пружины) и к серводвигателю 6 через усилитель подается напряжение, заставляющее серводвигатель переместить поперечину с якорями 5 и 4 в крайнее положение (до упора). При этом скорость Ох приобретает максимальное значение приг,, 0.
После соприкосновения пальца 7 с щаблоном контакт в отрывается от контакта а и серводвигатель начинает перемещать якори в направлении стрелки В, в результате чего скорость u,j уменьщается, а У, увеличивается. После того как отношепревзойдет значение tga
ние -
соответствуюгцей точки шаблона, смещение пальца уменьшается и контакты айв вновь замыкаются. Это ведет к реверсированию серводвигателя, вызывающего движение поперечины в обратную сторону.
Таким образом, при перемещении пальца 7 по участку С шаблона контакты а в копировального прибора будут попеременно замыкаться и размыкаться, а якорь серводвигателя 6 вместе с якорями 3 4 будет находиться около некоторого среднего положения, постепенно смещающегося по мереизменения tga контура шаблона. При этом движение кареток станка будет непрерывным и плавным, а величины скоростей
у .V и V у будут пульсировать соответственно качанию якорей.
После перехода пальца с участка С шаблона на участок Д увеличенное смещение пальца вызывает замыкание контактов в и б и изменение направления скорости v. При копировании на участке Д контакт в будет колебаться вблизи контакта б; в остальном процесс будет идти так же, как на участке С.
Скорость серводвигателя б зависит от его собственных параметров и не зависит от скоростей г , и У,, подач каретки. Поэтому скорость якорей 3 -л 4 при точной обработке можно выбрать значительно больше скорости подачи кареток. Серводвигатель применяется для уменьшения инерции, при этом число оборотов серводвигателя берут наименьшим.
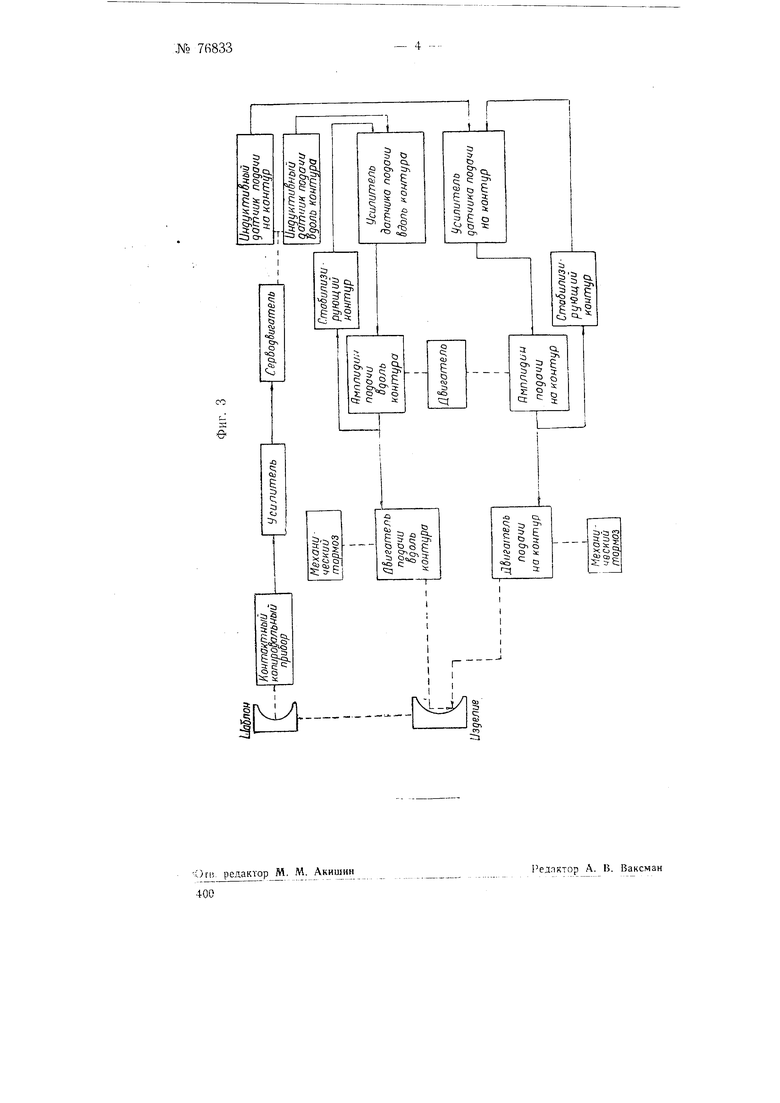
Как показано на скелетной схеме электропривода (фиг. 3) привод подачи осуществляется от двигателей, регулируемых по системе Леонарда, с использованием амплидингенераторов. Для лучщей стабилизации системы при реверсе двигатели подачи связаны с тормозами постоянного момента. Тормоза расположены непосредственно у двигателей для уменьшения колебаний потенциальной энергии.
Предмет изобретения
Электрическое устройство для управления механизмами (преимущественно металлорежущими станками) по заранее заданной программе (шаблону) при помоши контактногс датчика, отличающееся тем, что, с целью повышения скорости и чистоты копирования, контактные датчик воздействует на вспомогательный индуктивный датчик, управляющий через усилительную схему двигателями подачи.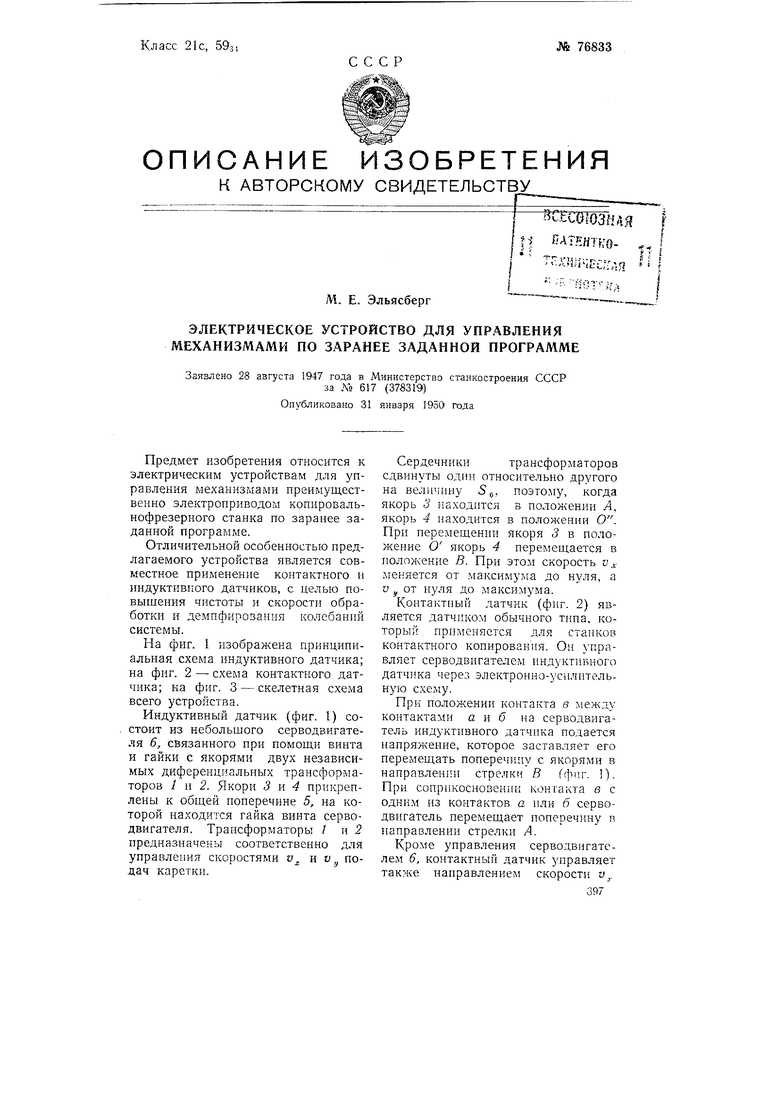

Фиг. 2
-5
/5
С
t:
%,
%.
ч;
7 У 1Д
-Г:И
