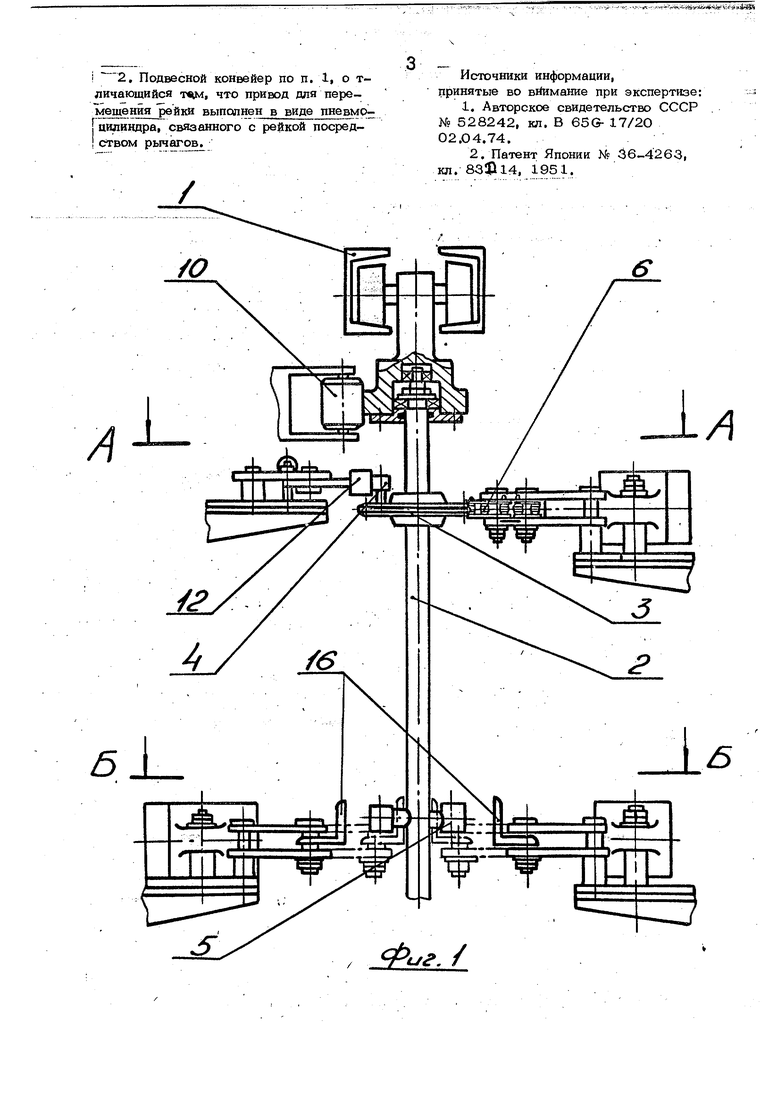
тического разворота подвесок вьтстнен в виде распсв8{ кенных в два яруса подСпружиненной токоподводяшей шнны для г взаимодейст я с пальцем и двух фиксирукацих шин, уй аЯОйпённьж с возможностью взаимодействия со стержнем, п|ри этом зубчатая рейка имеет привод дан перемещения рейки относительно звездочки. Привод для перемещения рейки, выпоп; нен в виде пневмсжвпиндра, связанного с рейкой посредстволл рычагов. I На фиг. 1 изображен общий вид ства;, :/
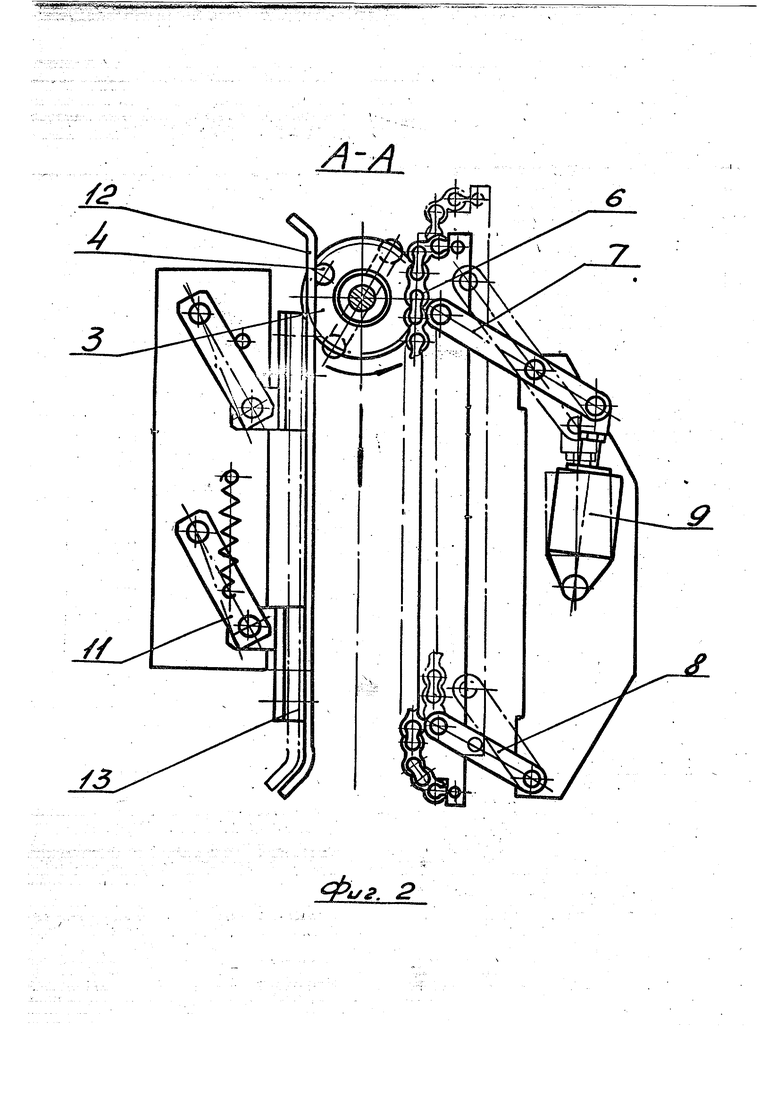
{ на. 4яг. 2 - разрез А-А на фиг. I; на фиг. 3 - разрез Б-Б на фиг. 1. По трассе подвесного конвейера 1 смонтированы грузовые подвески 2, свободШ 1вращающйебя вокруг своей вертикальнрй оси. Каждая подвеска снабжена звездочкой 3 со смонтирО ванньгм На ней пальцем 4. В нижней части подвески закреплен горизонтальный стержень 5, расположенный в плайе перпендикулярно пальцу 4 на звездочке 3. Механизм для автоматического разво рота подвесок (см. фиг. 1) содержит зубчатую рейку 6, выполненную в виде шины обтянутой отрезком цепи. Рейка закреплена на рычагах 7 и 8 и пйевмодилиндром 9 Шжёт Шодитъся % заШШШй со; звездЬч кой 3 подвески 2. удержания подвескЯв вертикальном положении вводё рейки 6 в зацепление со зв;ездочкой 3 в зоне ориентирующего устройства смонтирована ротиковая батарея 10. ....
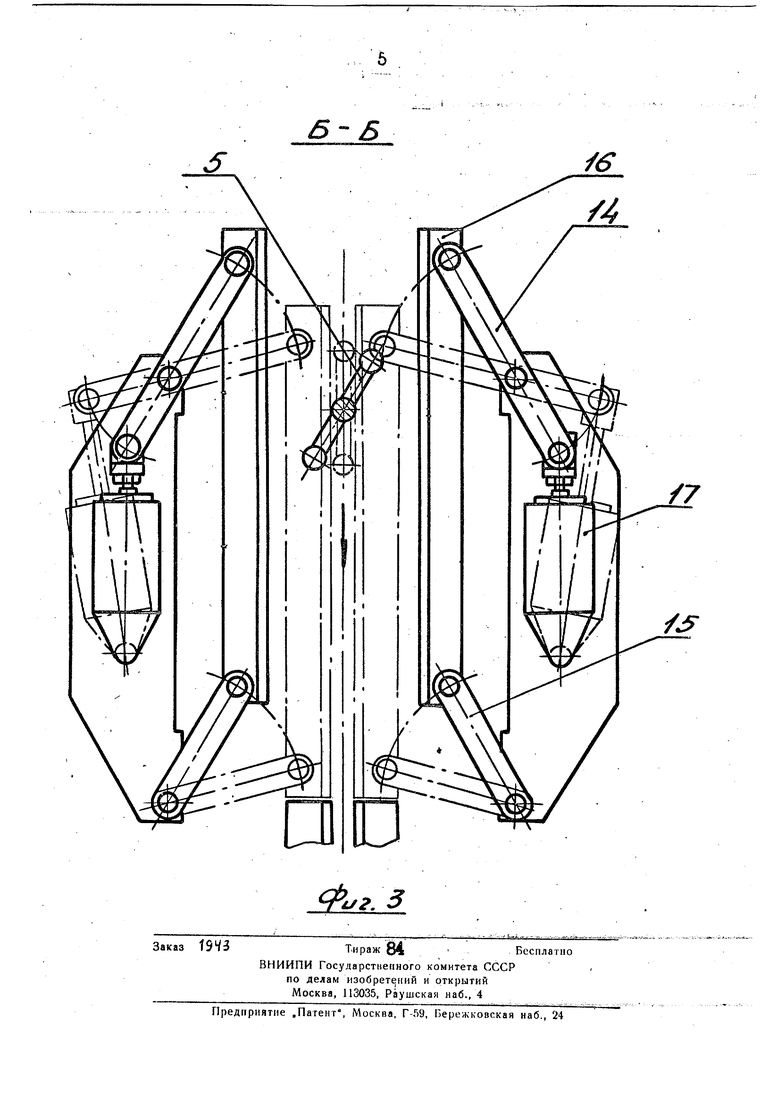
Напротив зубчат.р.й peiiKH 6 на- рычагах И щарнирноу1феплена подпружиненная токоподводящая шина- 12, взаимодействующая с пальцем4 подвески (см.фиг. 2). Шина изолирована от рычагов посредством прокладок 13, выпсшненных ; I из диэлектрика. Под зубчатой рейкой 6 I на качающихся рычагах 14 и 15 укреплены две фиксируюшие шины 16, приводимые пневмоцилиндрами 17 и служащие для фиксирования поперечного стержня 5 и в целом всей подвески в соориентирр; ваннок положении (см. фнг. 3). J - (Описанное устройство работает сэте- I дукэщим образом. Грузовая подвеска 2, продвигаясь по трассе подвесного конвейера 1, входит в зону ориентирующего устройства. При этом звездочка 3 подвески входит в зацепление с зубчатой рейкой 6. Подвеска начинает вращаться вокруг своей вертикальной оси (см. ; фиг. 2). Роликовая батарея 10 препятствует отклонению подвески от вертиТсальной вьгведению звездочки из зацепления с рейкой.
При повороте подвески палец 4 входит в контакт с шиаэй 12, к которой . пШвеДён ток низкого напряжения. Под действием пальца шина отклоняется то ходу дйжения конвейера, упруго поворачиваясь на рычагах 11. Поворот подвески продолжается до тех пор, пок палец контактирует с подпружиненной т окоподвОДящей шиной, снова возвращающейся в исходное положение. В момент прежращения контакта сигнал об утечке тока мгновенно преобразуется системой автоматики и выдается команда на срабатывание пневмоцилиццра 9 и рейка 6 выводится из зацепления со з кздочкой 3 подвески. Вращение подвески прекращается, при этом стержень 5 устанавливается в Несколько
отклоненном от оси трассы ксдавейера положении.-чЗ::/
Одновременно с пнев ОйМиндром, 9 i автоматически включаюгсй в работу
пневмоцилиндрь) 17, которые сводят шины 16. Последние, воздействуя на стержень 5, доворачивают подвеску до
совмещения оси стержня с осью трассы конвейера. Соориентированная таким образом подвеска выходит из зоны ориентирукацего. устройства. После чего осуществляется ее загрузка или разгрузка.В этот .}, шины 16 устанавли- i ваются.:.в,,-Исходное положение. -Итак, I
цикЯ рйботы повторяется для каждой :
последующей подвески.
I Конструкция данного конвейера сокращает длину участка р ворота подвесок, что приводит к экономии пронзводственных площадей.
формула изобретения
,.,.-
{ 1. Подвесной конвейер, включакзщий вращающиеся во1фуг вертикальной оси грузовые подвески со звездочками и механизм для автоматического разворота подвесок с зубчатой рейкой, о т;л и ч а ю щ и и с я тем, что, с целью ; сокращения длины участка разворота : подвесок, звездочка снабжена пальцем, а подвеска - горизонтальным стержнем, расположенным в Плане перпендикулярно пальцу на звездочке, причем механизм для автоматического разворота подвесок вьшсинен в виде расположенных в два Яруса подпружиненной токоподводящей шины для вза;Имодействия с пальцем и двух фиксирунэщих шин, установленных с возможностью взаимодёйствия/со стержнем, йри этом зубчатая рейка имеет привод для перемещения рейки относительно звездочки.
2. Подвесной конвейер по п. 1, о тличающийся тчм, что привод для перемещенйя рейки выполнен в виде пневмоцилиндра, связанного с рейкой посред
ством рычагов.
Источники информации, принятые во вйимание при экспертизе:
1. Авторское свидетельство СССР № 528242, кл. В 65G- 17/20 02.04.74.
2. Патент Японии N9 36-4263, кл. 83Ф14. 1951.
A-A
| название | год | авторы | номер документа |
|---|---|---|---|
| Подвесной конвейер | 1979 |
|
SU821338A1 |
| Подвесной грузонесущий конвейер | 1976 |
|
SU619399A1 |
| Устройство для перемещения и передачи подвесок с грузами | 1983 |
|
SU1133194A1 |
| Устройство для поворота грузовых подвесок конвейера | 1983 |
|
SU1155535A1 |
| Утсановка для окраски изделий | 1975 |
|
SU651854A1 |
| ПОДВЕСНОЙ ГРУЗОНЕСУЩИЙ КОНВЕЙЕР | 1970 |
|
SU267486A1 |
| Устройство для разгрузки подвесных конвейеров | 1984 |
|
SU1270085A1 |
| Подвесной конвейер | 1983 |
|
SU1084192A1 |
| Подвесной конвейер | 1990 |
|
SU1728091A1 |
| КОНВЕЙЕР С ПОДВЕСНОЙ ЛЕНТОЙ | 2009 |
|
RU2424170C2 |
Фиг. 2
