подвесок. По мере сближения ПК с вейером держатели точно войдут в кон- на изделий, расположенных с.внешней ок- стороны подвесок. 4 ил. 1270085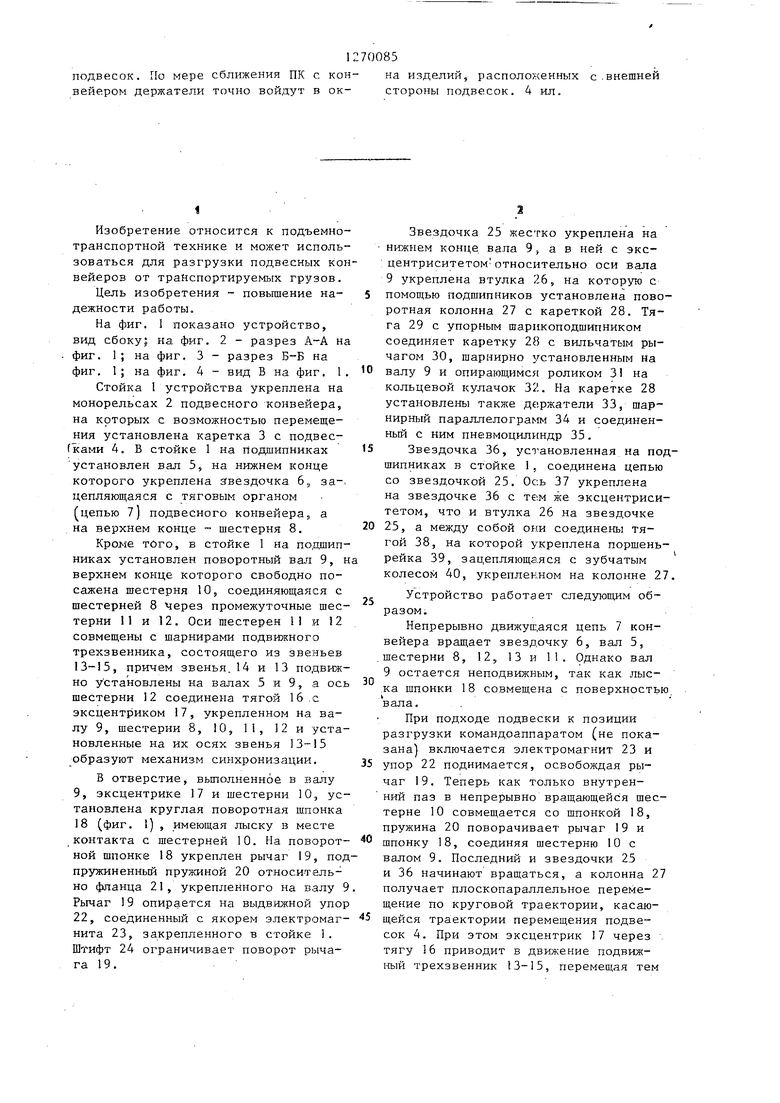
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для загрузки подвесного конвейера | 1983 |
|
SU1152894A1 |
| Устройство для загрузки подвесного конвейера | 1983 |
|
SU1084212A1 |
| Подвесной конвейер | 1983 |
|
SU1084192A1 |
| Устройство для перегрузок подвесок подвесного конвейера с одного пути на другой | 1974 |
|
SU682431A1 |
| Устройство для загрузки изделий на подвесной конвейер | 1983 |
|
SU1159849A1 |
| Подвесной грузонесущий конвейер | 1976 |
|
SU619399A1 |
| Устройство для осмотра и ремонта покрышек | 1972 |
|
SU478755A1 |
| Устройство для разгрузки подвесок грузонесущего конвейера | 1982 |
|
SU1081090A1 |
| Устройство для разгрузки подвесок грузонесущего конвейера | 1983 |
|
SU1162702A1 |
| ПОДЪЕМНО-ТРАНСПОРТИРУЮЩЕЕ УСТРОЙСТВО | 1992 |
|
RU2039000C1 |

I
Изобретение относится к подъемнотранспортной технике и может использоваться для разгрузки подвесных конвейеров от транспортируемых грузов.
Цель изобретения - повьшение надежности работы.
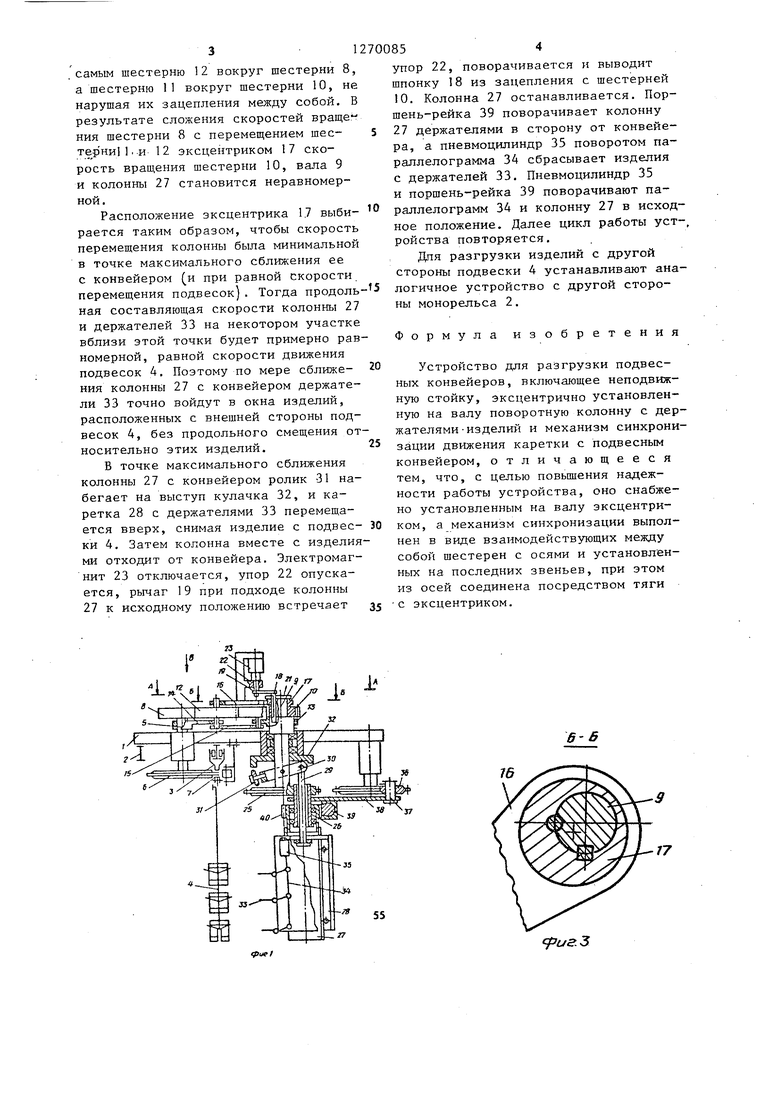
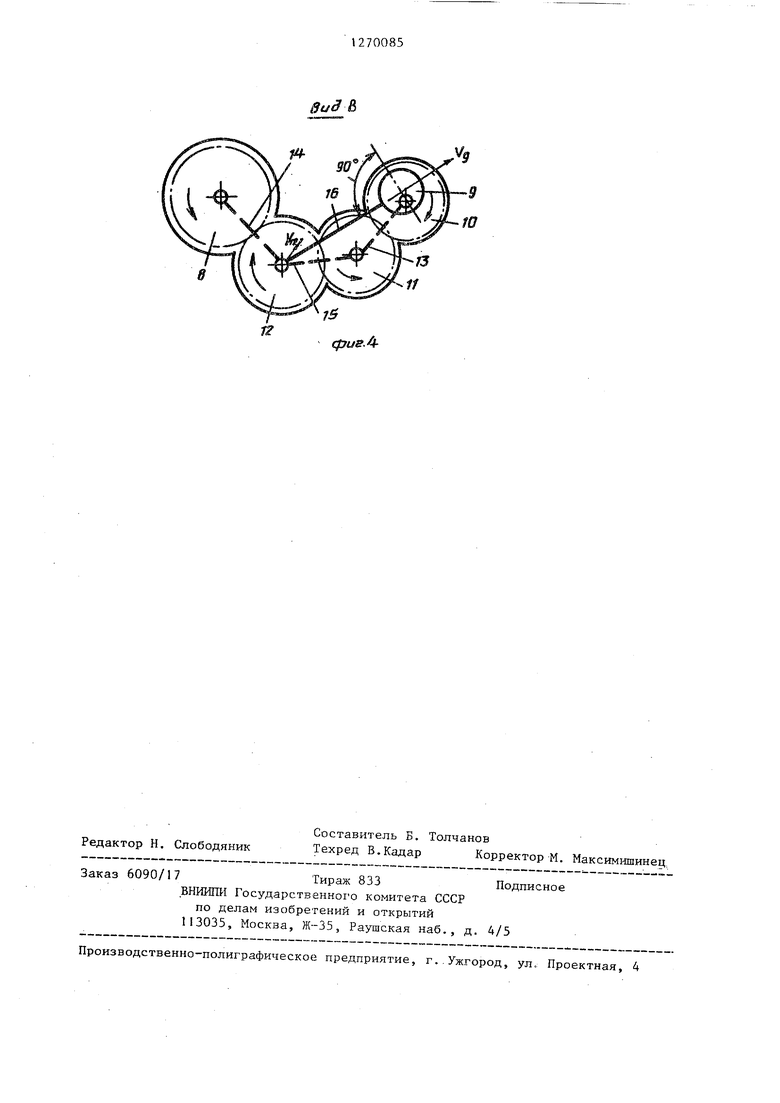
На фиг. 1 показано устройство, вид сбоку; на фиг. 2 - разрез А-А на фиг. 1; на фиг. 3 - разрез Б-Б на фиг. 1; на фиг. 4 - вид В на фиг. 1.
Стойка 1 устройства укреплена на монорельсах 2 подвесного конвейера, на которых с возможностью перемещения установлена каретка 3 с подвес(ками 4. В стойке 1 на подшипниках установлен вал 5, на нижнем конце которого укреплена згвездочка 6,, за-. цепляющаяся с тяговым органом fцепью 7) подвесного конвейера, а на верхнем конце шестерня 8.
Кроме того, в стойке 1 на по,цшипниках установлен поворотный вал 9, н верхнем конце которого свободно посажена шестерня 10, соединяющаяся с шестерней 8 Через промежуточные шеетеряй 11 и 12. Оси шестерен 11 и 12 совмещены с шарнирами подвижного трехзвенника, состоящего из звеньев 13-15, причем звенья,14 и 13 подвижно установлены на валах 5 и 9, а ось шестерни 12 соединена тягой 16 ,с эксцентриком 17, укрепленном на валу 9, шестерни 8, 10, 11, 12 и установленные на их осях звенья 13-15 образуют механизм синхронизации.
В отверстие, выполненное в валу 9, эксцентрике 17 и шестерни 10, установлена круглая поворотная шпанка 18 (фиг. 1) , имеющая лыску в месте контакта с шестерней 10. На поворотной шпонке 18 укреплен рычаг 19, подпружиненный пружиной 20 относительно фланца 2I, укрепленного на валу 9 Рычаг 19 опирается на выдв:ижной упор 22, соединенный с якорем электромагнита 23, закрепленного в стойке 1. Штифт 24 ограничивает поворот рычага 19.
2
Звездочка 25 жестко укреплена на нижнем конце вала 9, а в ней с эксцентриситетом относительно оси вала 9 укреплена втулка 26, на которую с помощью подшипников установлена поворотная колонна 27 с кареткой 28. Тяга 29 с упорным шарикоподшипником соединяет каретку 28 с вильчатым рычагом 30, шарнирно установленным на валу 9 и опирающимс5 роликом 31 на кольцевой кулачок 32. На каретке 28 установлены также держатели 33, шарнирный параллелограмм 34 и соединенный с ним пневмоцилиндр 35.
Звездочка 36, установленная на пошипниках в стойке 1, соединена цепью со звездочкой 25. Ось 37 укреплена на звездочке 36 с те-м же эксцентриситетом, что и втулка 26 на звездочке 25, а между собой они соединены тягой 38, на которой укреплена поршеньрейка 39, зацепляющаяся с зубчатым колесом 40, укрепленном на колонне 2
Устройство работает cлeдyюш м образом.
Непрерывно движущаяся цепь 7 конвейера вращает звездочку 6, вал 5, .шестерни 8, 12, 13 и П. Однако вал 9 остается неподвижным, так как лыс.ка шпонки 18 совмещена с поверхность вала.
При подходе подвески к позиции разгрузки командоаппаратом (не показана) включается электромагнит 23 и упор 22 поднимается, освобождая рычаг 19. Теперь как только внутренний паз в непрерывно вращающейся шестерне 10 совмещается со шпонкой 18, пружина 20 поворачивает рычаг 19 и шпонку 18, соединяя шестерню 10 с валом 9. Последний и звездочки 25 и 36 начинают вращаться, а колонна 2 получает плоскопараллельное перемещение по круговой траектории, касающейся траектории перемещения подвесок 4. При этом эксцентрик 17 через тягу 16 приводит в движение подвижный трехзвенник 13-15, перемещая тем 3 -1 самым шестерню 12 вокруг шестерни 8, а шестерню 11 вокруг шестерни 10, не нарушая их зацепления между собой, В результате сложения скоростей вращег ния шестерни 8 с перемещением шесте рни1 1, и 12 эксцентриком 17 скорость враш,ения пюстерни 10, вала 9 и колонны 27 становится неравномерной. Расположение эксцентрика 1.7 выбирается таким образом, чтобы скорость перемещения колонны была минимальной в точке максимального сближения ее с конвейером (и при равной скорости перемещения подвесок), Тогда продоль ная составляющая скорости колонны 27 и держателей 33 на некотором участке вблизи этой точки будет примерно рав номерной, равной скорости движения подвесок 4, Поэтому по мере сближения колонны 27 с конвейером держатели 33 точно войдут в окна изделий, расположенных с внешней стороны подвесок 4, без продольного смещения от носительно этих изделий. Б точке максимального сближения колонны 27 с конвейером ролик 31 набегает на выступ кулачка 32, и каретка 28 с держателями 33 перемещается вверх, снимая изделие с подвески 4, Затем колонна вместе с изделия ми отходит от конвейера. Электромагнит 23 отключается, упор 22 опускается, рычаг 19 при подходе колонны 27 к исходному положению встречает 854 упор 22, поворачивается и выводит шпонку 18 из зацепления с шестерней 10. Колонна 27 останавливается. Поршень-рейка 39 поворачивает колонну 27 держателями в сторону от конвейера, а пневмоцилиндр 35 поворотом параллелограмма 34 сбрасывает изделия с держателей 33. Пневмоцилиндр 35 и поршень-рейка 39 поворачивают параллелограмм 34 и колонну 27 в исходное положение. Далее цикл работы устройства повторяется. Дпя разгрузки изделий с другой стороны подвески 4 устанавливают аналогичное устройство с другой стороны монорельса 2. Формула изобретения Устройство для разгрузки подвесных конвейеров, включающее неподвижную стойку, эксцентрично установленную на валу поворотную колонну с держателями -изделий и механизм синхронизации движения каретки с подвесным конвейером, отличающееся тем, что, с целью повьш1ения надежности работы устройства, оно снабжено установленным на валу эксцентриком, а механизм синхронизации выполнен в виде взаимодействующих между собой шестерен с осями и установленных на последних звеньев, при этом из осей соединена посредством тяги С эксцентриком.
tfMl
бВ
ю
сриг.З
8иЗ г
| Устройство для разгрузки подвесок грузонесущего конвейера | 1982 |
|
SU1081090A1 |
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
| Авторское свидетельство СССР № 10848812, кл | |||
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
