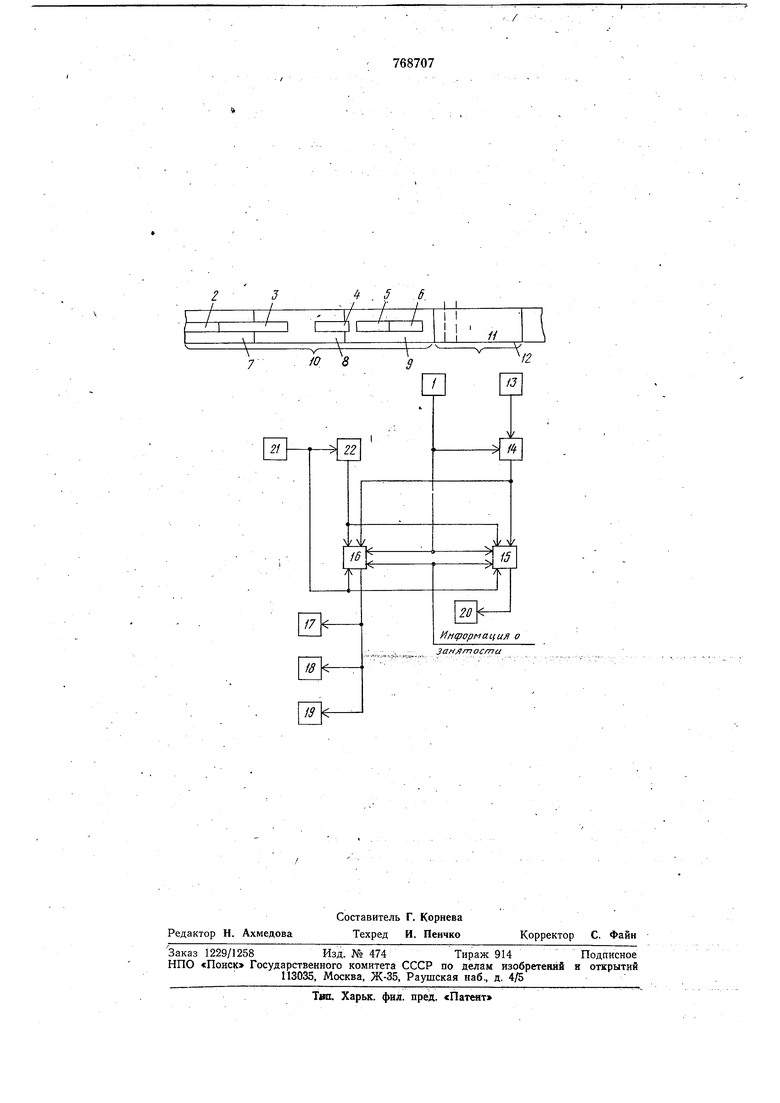
га 10 заготовки располозкены с Йрбйзвольными по величине зазорами, а Сбкция // не занята заготовкой. При наличии информации о незанятости секции М по импульсу генератора 2d блоки 15 и 16 выдают команды пуска иа приводы 17-20.
С момента прохождения передним торцом заготовки :5 линли датчика. /, установленного на границе раздела секций 9 и 11. рольгангов 10 и 12, путевые импульсы датчика J3 -поступают ,в измеритель 14.
В момент пересечения передним торцом заготовки 6 заданной позиции измеритель 14 через блок 1€ прерывает к.о-мг(ндЪ1 пуска приводов 17-М секций 7-9. При этом в измерителе 14 оказывается записанным число импульсов, соответствующее пути перемещения заготовки 6 от границы раздела рольгангов 10 и 12 до заданной пози-ции.. Та.к как секция рольганга 12 остается включенной, то в измеритель 14 Продолжают постуйать путевые импулысы датчика 13 до значения кода, соответствующего заданной позиции, после чего снимается, команда пуока -секции //. В результате такого управления привод секции LI выключаете с необходимой задержкой относительно момента выключения приводов секций 7-9.
Если до окончания задержки задний то.;.рец заготовки лроходит мимо датчика 1 (осуществляется отрыв заготов-ки от ряда), то снимается команда пуска приводов Секций обоих рольгангов. (При этом заготовка 6 ока зывается остановленной на секции //, а заготовки 2-5 - на секциях 7-9.
Если в интервале- задержки задний торец заготовки не пересекает линию датчика 1, тоПовторноевключенкбжринодов секций 7-1/1/ осуществляется по тактовому им-пульсу генератора &1, а выключение лри выполнении одного из рассмотренных усло-.вий. Повторные включения приводов .будут Продолжаться до прохождения задним торцом заготовки 6 линии датчика /.
Способ позволяет исключить возможность возникновения аварийных ситуаций
на секцияхроЖганга по причине столкновения объектов, движущихся на транспортной скорости, с неподвижными объектами или их «наезда на включенные секции 5 рольганга, что исключает возможность снижения производительности объекта управления из-за поломки и простоев оборудования.
Формула изобретения
Способ управления перемещением объектов по накопительному и разделительно-,
му рольгангам, примыкающим один к другому, согласно которому включают одновременно приводы группы секций накопительного и привод незанятой секции разделительного рольгангов через заданные промежутки времени, определяемые допустимым числом включений привода в единицу времени, а выключают - в момент пересечения задним торцом объекта границы раздела рольгангов, отличающийся тем,
что, с цельюповышения надежности управления, дополнительно выключают одновременно приводы группы секций накопительного и привод незанятой секции разделительного рольгангов с заданной задержкой
относительно момента их включения, равной допустимой продолжительности включения привода секции, причем, выключают приводы групяь секций накопительного и привод секции разделительного рольгангов
в моменты пересечения передним торцом, объекта заданных позиций, находящихся относительно границы раздела рольгангов на расстояниях, кратных соответственно половинному и полному значениям длины самого .короткого объекта.
Источник информации, принятый во внимание при эмспертизе:
I. Авторское свидетельство СССР по заявке № 2613898/03, кл. В 65 G 17/22, 1978 (прототип).
7Ю 8
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ управления перемещением объектов | 1978 |
|
SU751797A1 |
| Способ управления безупорным остановом перемещаемой заготовки и устройство для его осуществления | 1986 |
|
SU1407603A1 |
| Резервированное устройство для управления перемещением объекта | 1982 |
|
SU1067468A1 |
| Способ измерения длины движущегося изделия | 1978 |
|
SU763673A1 |
| Устройство для управления безупорным остановом перемещающейся заготовки | 1983 |
|
SU1084094A2 |
| Устройство управления безупорным остановом перемещающейся заготовки | 1984 |
|
SU1219191A2 |
| Способ безупорного останова перемещающихся заготовок | 1977 |
|
SU738706A1 |
| Устройство для учета перемещаемых изделий | 1983 |
|
SU1096671A1 |
| Устройство управления безупорным остановом перемещающейся заготовки | 1980 |
|
SU900907A1 |
| Устройство для регулирования ритма выдачи заготовок из печей | 1976 |
|
SU651865A1 |
22
- 1f
Информации о
занятости
