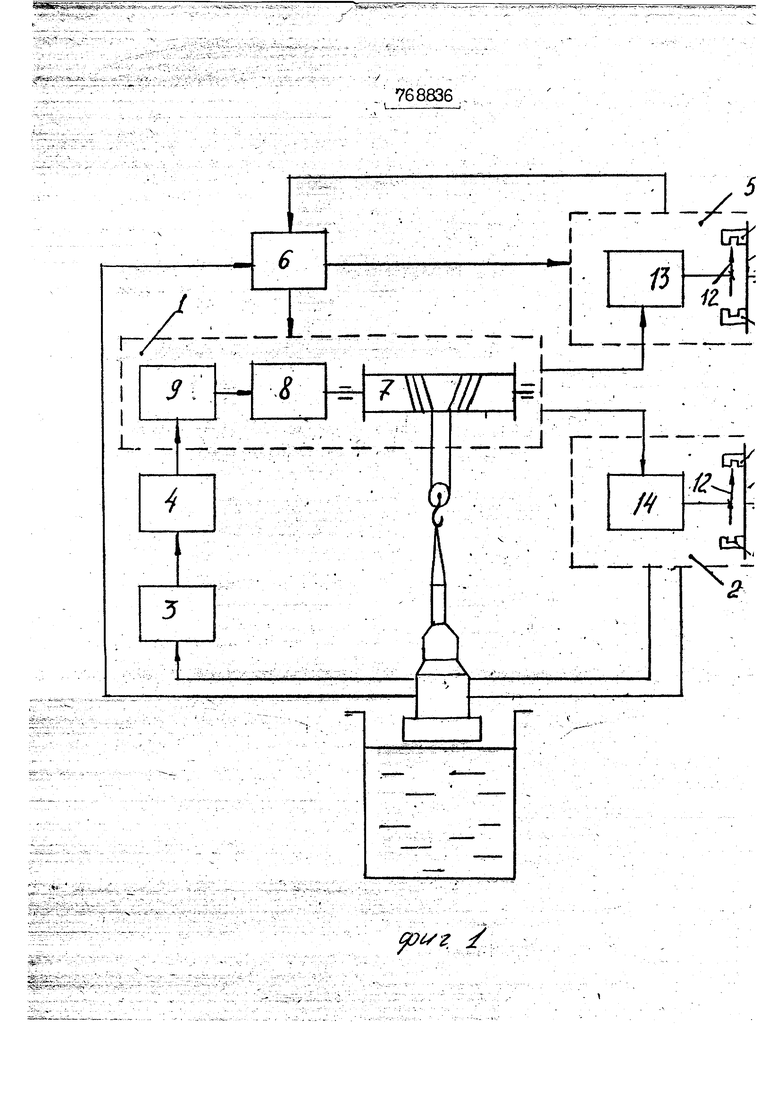
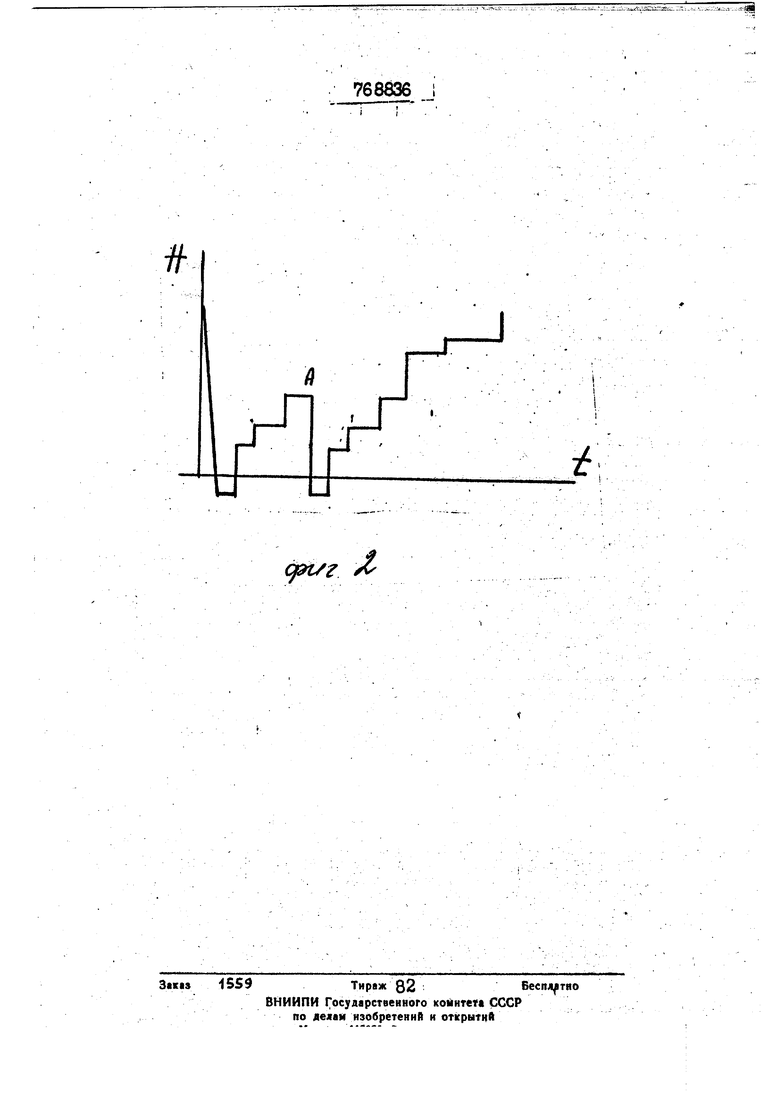
й§тй§Йвн1 я Вёченйя йздёлйа програмкшый fei S 4 54«s ji:-i блок Si блок 4 регулятора скорости, блок 5 этапиости и блок в реверса. .Подъемный механизм 1 включает в v себя лебедку 7 подъема, прйв6д которой осушествляется через редуктор асин-кронным двигателем 9 с фазныь ррто.рОМ. ;,K ri --i:it:t.;.j.,-;:;-,.., ; „,:.ж-- -1-,-г.рк,, -, -- .- Блок 2 датчиков дискретного измеНВН1Ш сечений лйдепия н ,6jrioK ,5-.. ности могут -предстаблять, напрййбр, набор индуктивных датчиков 1О, гЙейсглбжМ ных по окружности дисков 11, Принцип индуктивности датчиков основан на срыве генерации при введении в прорезь датчиi;-;---,. .-., -, ,-...- ,- -r------«T--.J--.-V-- - ------ -- -----ЧЬ-J.-af. iJ - --ftj i bi-i--;----- - ; - . КОВ диамагнитных стрелок 12, Шханически связанных с под;ьемнь1М механизмом 1 через редукторы 13, 14; .Требу эмый температурный режим задается соответствующим расположением йндуктйвн ых датчиков 3,0, ёлока 2 дат- чикоБ дискретного изменения сечения изделий, а этапность ejpo выполнения рж:положенйём индуктивных датчиков 10 блока 5 этагмости. ПротрШйный блок 3 задйет закс« изменения скорости по сигналамс блока ЙЙтШк6й дйскретн(рго изменения сечений изделий. - .:-..-, .,-„., Блок4 регулятора скЪрости содержит Несколько тиристорных коммуТ)ат6ров, при включен ИИ каждбго Из ЙбтЬрйх; шунтируётся соответствующая чисть ротор- ного сопротивления двигателя подъемного механизма. - Блок 6 реверса может быть реа;лизо вшг на тр1рйе сУрахГ }ШюШшШГ1б ш статора попарно встречно пapaл юлы o и управляемых сигналами с блЖа датчй- КОБ дкскретного изменения сечения изделия ргрожнме подъема и с блока 5 этап Jix;W йтж КйШ ШускШМ 5даКв -: Ре жй м 3 акалки ё адается ехнШогичес% - - -- -.-------.- -Koft UHKJidrpaKffvibfl ,;fnipffMepy, такой, как пбкглш о Hfi фнг. 2, Согласно этой циклб- грамме ifeоВхЩймо 3йкашНаёмУ|о ёаготовкУ бпустйть в ба1кГзаШмиз влечь до тбчки А, далее повторно пбгрузить в бак пбК Шматьцо пдшо ПОДдерживая нёобхбдамую для каждбШ уВДсткЖ ткбнусйости, т. е. ироцесс Г -акйлки-йбл йё1ГТГреШдй ШГ 1 этапй первый этап включает опускание загот овйй дб ИбйТбго пбгружения с поЬледуюшим извлечением ее из воды до точки А (фиг. 2); второй - повторное опускание до полного погружения б последующим ПОД1ЙИОМ заголовки с заданной сЛюрб-- стью на каждом из участков до полного ,нйвлеченця. Требуемый температурный ( режим для каждого участка конусности заготовки задается взаимным расположен нием Т1ндуктивных датчиков 10 блока 2 j датчиков дискретного изменения сеченрй j издедйя На диске 11. Программа после- i д6вате1пгьного перехода от этапа к этапу j расположением индуктивных датчиков 10 j блока 5 этапности, Устройство для кдаогрэтапной програм- мной закалки длинномерных изделий функiiHeKHpyet следующим образом.. , После полного бйускания изделия в зак. бак диамагнитная стрелка 12 доЬтигает прорези первого датчика бло- j ка 2, датчиков дискретного изменения сечения изделия, который выдает сигнал по дЬум керналам: в блок б реверса и программный блок 3. В результате . ч блок 6 реверса переводит подъемный механизм 1 в режимподъема, а программный блок 3 фор ; Ирует требуемый з,акрн изменения скорости, включая соответствующий коммутатор блока 4 регулятора скорости.Выходнь1е сигналы блока регулятора скОрбсти управляют скоростью подъемного механизма 1. Осуществляется извлечение изделия из закалочного бака с определенной скоростью. По мере извлечения изделия из воды диамагнитная { стрелка. 12 блока 2 датчиков дискретного изменения сечения: Изделия, Жёётк б связанная через редуктор 13 с подъемным механизмом 1, перемешается по направлению к очередному второму датчикубдока 2 датчиков изменения сечения изделия. При достижении стрелкой прорези вторргб датчика, с выходаблока 2 датчикоэ дискретного из1менения сечения изделия выдается сигнал в программный блок 3. В резу/ьтате изменяется (зигнал знания, поступающий в блок 4 регулятора скорости, по которому включается соответствующий тиристорный кбммутатбр и изменяется скорость. Таким образом осуществляется изменение скорости при подъеме изделия в местах измене.ния кбнусности, которым соответствует расположение индуктивных датчиков 10 на диске 11, блока 2 датчиков дискретного изменения речения изделия. « ПривйпбШёййнпрограммы закалки первого этапа диамагнитная стрелка 12 блока 5 этапности, жестко с ввязанная через редуктор . подъемным механиз- . мом 1, перемещается по направлению к первому датчику блока 5 этапности и бстигает йрсфе иЙ уктивного датчика точке А (см. фир. 2) те в конце -, : . . . : первого этапа. С1 выхода блока 5 этапности выдается сигнал на вход блока 6 реверса по которому ся переводит подъемный механизм 1 в режим опускания Вследствие этого ранее извлеченная часть заготовки снова погружается в воду. Конец опускания фиксируется первым датчиком блока 2 датчиков дискретного изменения сечения изделия по сигналу которого блок 6 реверса переключает подъемный механизм 1 в режим подъема, а программный блок 3 через: блок 4 регулятора формирует соо ветствующий заксж изменения скорости ;Извлечения для подъемного механизма 1 Таким образом осуихествляется второй этап закалки. Для исключения повторного срабатывания первого датчика блока 5 этапности при выполнении второго этапа закалки в устройстве предусмотренд связь блока 6 реверса с блоком 5 этапности, по которой выдается сигнал6на блокировку этого датчика выполнения первого этапа закалки. .Формула изобретения Устройство для программной закалки длинномерных изделий по авт. св. № 553299, о т л к ч а ю ш е е с тем, что, с целью повышения качества закаливаемых 1 дёлий, оно дополнительно снабжено блоком этапности и блоксм реверса, причем выход подъемного механизма соединен с первым входом блока этапности, выход которого соединен с первым входом блока реверса, второ вход которого соединен с выходом блока датчиков дискретного изменения сечения изделия, первый выход блока реверса соединен с входом подъемного механизма, а второй выход соединен с вторым Bxoj: OM блока этапности. Источники информации, п|ринять1е во внимание При экспертизе: 1. Авторское свидетельство СССР N 553299, кл. С 21D 11/О, 1975.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для программной закалки длинномерных изделий | 1982 |
|
SU1052554A1 |
| Устройство для программной закалки длинномерных изделий | 1980 |
|
SU908866A2 |
| Устройство программной закалки длинномерных изделий | 1980 |
|
SU865942A1 |
| Устройство для программной закалки длинномерных изделий в резервуаре с изменяющимся уровнем жидкости | 1978 |
|
SU706457A1 |
| Устройство для программной закалки длинномерных изделий | 1988 |
|
SU1548224A1 |
| Устройство для программной закалки длинномерных изделий | 1987 |
|
SU1440942A1 |
| Устройтво для программной закалки длинномерных изделий с переменной конусностью | 1976 |
|
SU585226A1 |
| Устройство для программной закалки длинномерных изделий с переменной конусностью | 1982 |
|
SU1036772A1 |
| Устройство для программной закалки длинномерных изделий | 1982 |
|
SU1059012A1 |
| Устройство для программной закалки длинномерных изделий | 1982 |
|
SU1016385A1 |
.1 60 L
Я срг/г
л
