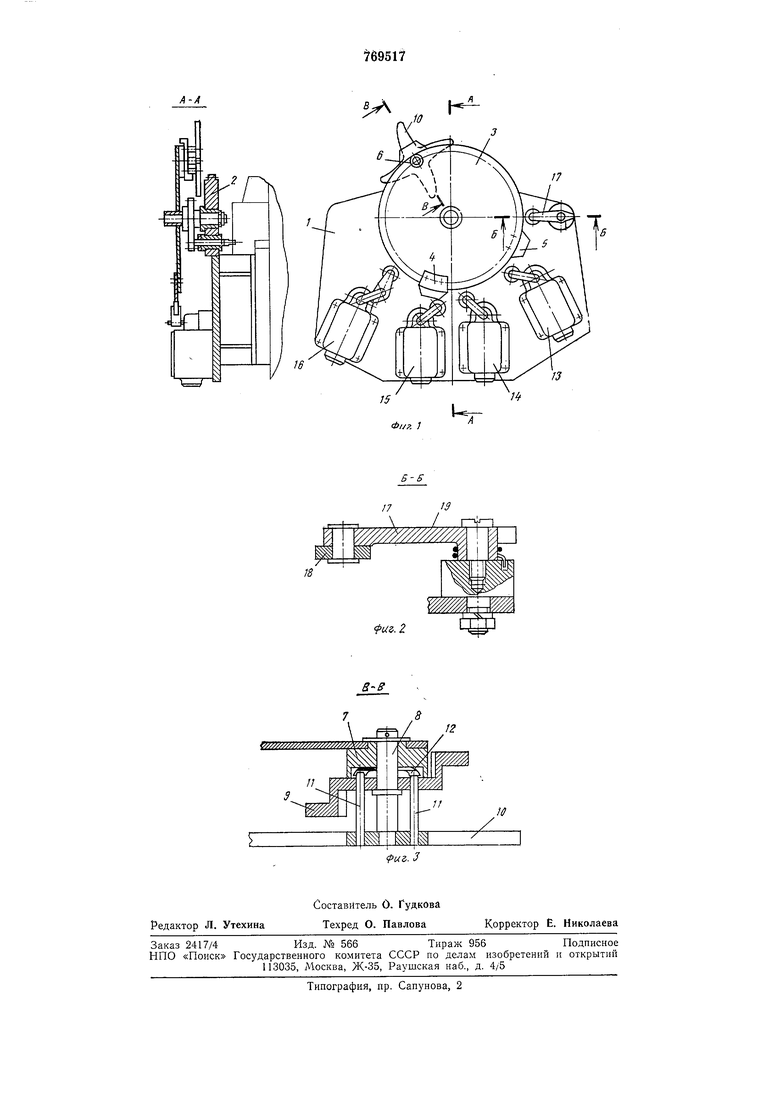
На корпусе 1 командоаппарата размещены разноступенчатые конечные выключатели 13-16 и шарнирно установленный откидной рычаг 17 с роликом 18 и нружиной 19. Работает комаидоаппарат следующим образом. В исходном ноложении толкателя диск 3 находится также в исходном положении, кулачок 4 взаимодействует с выключателем 15. При получении команды на начало работы механнзма, нанример толкателя, согласно циклограмме агрегата, при повороте диска 3 селективный узел 6 проходит мимо рычага 17, отжимая его, и кулачок 9 соответствующим выступом взаимодействует с выключателем 14, который дает сигнал в схему управления н толкатель получает команду на реверс. При обратном вращенни диска крестовина 10 взаимодействуя с роликом 18 рычага 17 и поворачивается, увлекая за собой посредством штифтов 11 кулачок 9, который поворачивается на 90° и выводит очередной выступ кулачка, положение которого фиксируется храиовиком 12. При команде на следующий ход при вращении диска кулачок 9 своим выведенным выступом взанмодействует с соответствующим рабочему циклу выключателем 13. При обратном ходе диска крестовина 10, взаимодействуя с роликом 18 рычага 17, поворачивается и выводит следующий выступ кулачка, необходимый для совершения очередного хода. Количество выстунов кулачка и расположение их по высоте обеспечивает последовательность срабатывания конечных выключателей в зависимости от цикла работы агрегата. Использование новых элементов - селективного узла и взаимодействующего с ним откидного рычага с роликом позволяет: механически запоминать предыдущий ход исполнительного механизма и изменять последующий за счет установки поворотного кулачка в определенное положение и его воздействия на соответствующий конечный выключатель, что позволяет упростить схему управления агрегата и исключить из нее сложное и дорогостоящее электрическое ЗУ, повысить надежность агрегата за счет уменьшения числа отказов, которые неизбежны при практическом использовании электрических блокировок, например в случае перерыва питания электроэнергии и т. н. Формула изобретения Командоаппарат для управления механизмами с последовательно-промелсуточным движением, содержащий корпус, привод с перфорированным диском, иа котором установлены кулачки и разновысотные конечные выключатели, отличающийся тем, что, с целью упрощения конструкции и новышения надежности командоаппарата, в нем установлен селективный узел, состоящий из втулки, установленной на нерфорироваином диске с помощью поворотной оси, на которой закреплены храповик в виде четырехлепестковой пластинчатой пружины, кулачок с разновысотными выступами и крестовина, связанная с кулачком с разновысотными выступами посредством штифтов, концы которых сонряжены с лепестками пластинчатой пружины храповика, прнчем на корпусе в одной плоскости с селективным узлом установлен откидной подпружиненный рычаг с роликом. Источники информации, принятые во внимание при экспертизе 1. Авторское свидетельство СССР № 246295, кл. F 27D 19/00, 1963. 2. Авторское свидетельство СССР № 622643, кл. В 23Q 35/00, 1978 (прототии).
A-A
W
J

| название | год | авторы | номер документа |
|---|---|---|---|
| Пневматический конечный выключатель | 1977 |
|
SU703764A1 |
| Командоаппарат | 1984 |
|
SU1399832A1 |
| Устройство для приведения кругловязальной машины в положение,соответствующее началу вязания изделия | 1985 |
|
SU1339173A1 |
| Устройство для изготовления металлических бирок из ленты | 1972 |
|
SU510297A1 |
| Командоаппарат | 1984 |
|
SU1399833A1 |
| Установка для деления теста и загрузки его в формы люльки расстойнопечного агрегата | 1976 |
|
SU606569A1 |
| Автоматическая линия для изготовления стержней | 1990 |
|
SU1759533A1 |
| Поворотный стол | 1985 |
|
SU1292987A1 |
| Автоматическая линия для нанесения гальванических покрытий | 1982 |
|
SU1046354A1 |
| Манипулятор для загрузки конвейера мешковыми грузами | 1985 |
|
SU1316949A1 |
}8
179
/.
W////7///M
/
luz.2
