////////
12 Г 8 ,
. X. {.
сд ю
01
00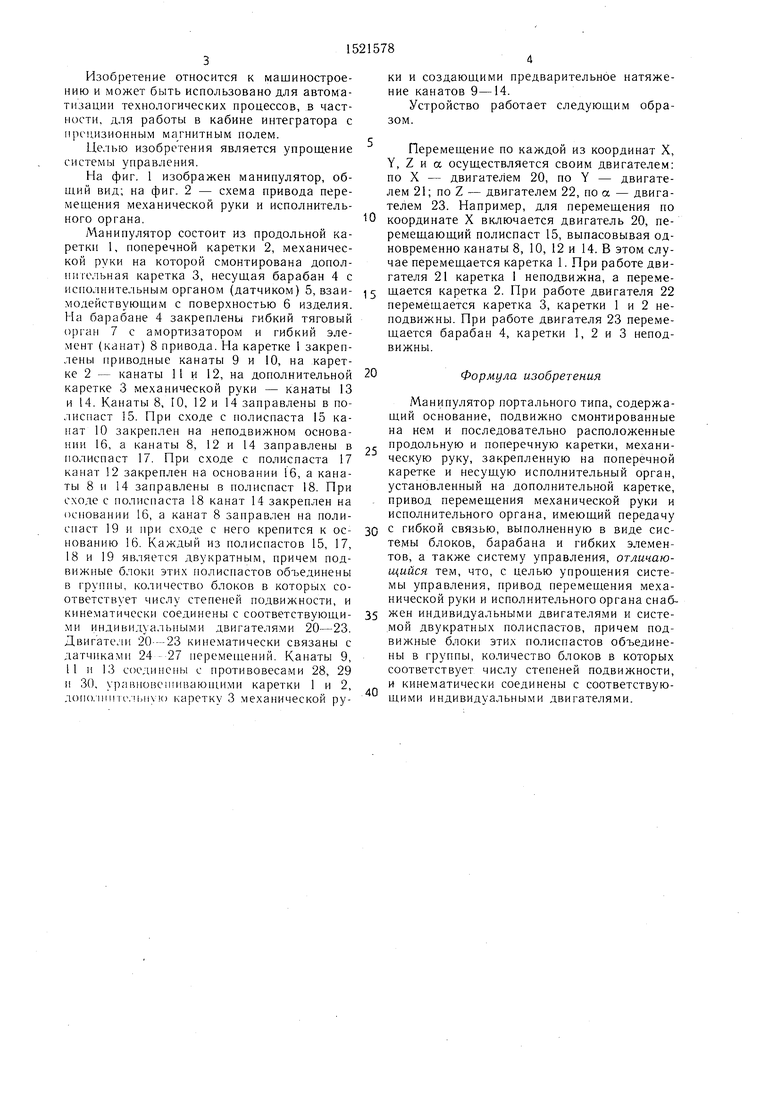
| название | год | авторы | номер документа |
|---|---|---|---|
| Манипулятор портального типа | 1985 |
|
SU1310199A1 |
| Манипулятор | 1986 |
|
SU1344597A1 |
| Устройство для защиты шлюзовых ворот от навала судов | 1980 |
|
SU874862A1 |
| Кабельный кран | 1987 |
|
SU1532530A1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ УГЛОВ НАКЛОНА КАНАТОВ ПРИ СДВОЕННОМ ПОЛИСПАСТЕ | 2010 |
|
RU2431596C1 |
| Манипулятор | 1979 |
|
SU781049A1 |
| Устройство для индивидуального перемещения людей и грузов в подземных горных выработках по подвесной монорельсовой дороге | 2024 |
|
RU2836283C1 |
| МОБИЛЬНЫЙ ПЕРЕНОСНОЙ КОПЕР | 2000 |
|
RU2203359C2 |
| Манипулятор | 1978 |
|
SU770784A1 |
| Консольный кран | 1977 |
|
SU854867A1 |

Изобретение относится к машиностроению и может быть использовано для автоматизации технологических процессов, в частности для работы в кабине интегратора с прецизионным магнитным полем. Цель изобретения - упрощение системы управления. Для этого привод перемещения механической руки с исполнительным органом имеет индивидуальные двигатели 20-23, кинематически соединенные с соответствующими двукратными полиспастами 15,17,18 и 19. Каждый полиспаст является двукратным, причем подвижные блоки этих полиспастов объединены в группы, количество блоков в которых соответствует числу степеней подвижности. 2 ил.
фиг. 2
Изобретение относится к машиностроению и может быть использовано для автоматизации технологических процессов, в частности, для работы в кабине интегратора с прецизионным магнитным полем.
Це.чью изобретения является упрощение системы управления.
На фиг. 1 изображен манипулятор, общий вид; на фиг. 2 - схема привода перемещения механической руки и исполнительного органа.
Манипулятор состоит из продольной каретки 1, поперечной каретки 2, механической руки на которой смонтирована дополнительная каретка 3, несущая барабан 4 с
ки и создающими предварительное натяжение канатов 9-14.
Устройство работает следующим образом.
Перемещение по каждой из координат X, Y, Z и а осуществляется своим двигателем: по X - двигателем 20, по Y - двигателем 21; по Z - двигателем 22, по а - двигателем 23. Например, для перемещения по О координате X включается двигатель 20, перемещающий полиспаст 15, выпасовывая одновременно канаты 8, 10, 12 и 14. В этом случае перемещается каретка 1. При работе двигателя 21 каретка 1 неподвижна, а перемеиснолнительным органом (датчиком) 5, взаи- щается каретка 2. Нри работе двигателя 22 модействующим с поверхностью 6 изделия.перемещается каретка 3, каретки 1 и 2 неподвижны. При работе двигателя 23 перемещается барабан 4, каретки 1, 2 и 3 неподНа барабане 4 закреплены гибкий тяговый орган 7 с амортизатором и гибкий элемент (канат) 8 привода. На каретке 1 закреплены приводные канаты 9 и 10, на каретке 2 - канаты 11 и 12, на дополнительной 20 каретке 3 механической руки - канаты 13 и 14. Канаты 8, ГО, 12 и 14 заправлены в полиспаст 15. При сходе с полиспаста 15 канат 10 закреплен на неподвижном основании 16, а канаты 8, 12 и 14 заправлены в 25 полиспаст 17. При сходе с полиспаста 17 канат 12 закреплен на основании 16, а канаты 8 и 14 заправлены в полиспаст 18. При сходе с полиспаста 18 канат 14 закреплен на основании 16, а канат 8 заправлен на полиспаст 19 и при сходе с него крепится к основанию 16. Каждый из полиспастов 15, 17, 18 и 19 является двукратным, причем подвижные блоки этих полиспастов объединены в группы, количество блоков в которых соответствует числу степеней подвижности, и кинематически соединены с соответствующими индивидуальными двигателями 20-23.
Двигатели 2023 кинематически связаны с
датчиками 24 - 27 перемещений. Канаты 9, 11 и 13 соединены с противовесами 28, 29 и 30, уравновешивающими каретки 1 и 2, ).и1пт.м1)) каретку 3 механической ру30
35
40
вижны.
Формула изобретения
Манипулятор портального типа, содержащий основание, подвижно смонтированные на нем и последовательно расположенные продольную и поперечную каретки, механическую руку, закрепленную на поперечной каретке и несущую исполнительный орган, установленный на дополнительной каретке, привод перемещения механической руки и исполнительного органа, имеющий передачу с гибкой связью, выполненную в виде системы блоков, барабана и гибких элементов, а также систему управления, отличающийся тем, что, с целью упрощения системы управления, привод перемещения механической руки и исполнительного органа снабжен индивидуальными двигателя.ми и системой двукратных полиспастов, причем подвижные блоки этих полиспастов объединены в группы, количество блоков в которых соответствует числу степеней подвижности, и кинематически соединены с соответствующими индивидуальными двигателями.
ки и создающими предварительное натяжение канатов 9-14.
Устройство работает следующим образом.
Перемещение по каждой из координат X, Y, Z и а осуществляется своим двигателем: по X - двигателем 20, по Y - двигателем 21; по Z - двигателем 22, по а - двигателем 23. Например, для перемещения по координате X включается двигатель 20, перемещающий полиспаст 15, выпасовывая одновременно канаты 8, 10, 12 и 14. В этом случае перемещается каретка 1. При работе двигателя 21 каретка 1 неподвижна, а перемещается каретка 2. Нри работе двигателя 22 перемещается каретка 3, каретки 1 и 2 не
вижны.
Формула изобретения
Манипулятор портального типа, содержащий основание, подвижно смонтированные на нем и последовательно расположенные продольную и поперечную каретки, механическую руку, закрепленную на поперечной каретке и несущую исполнительный орган, установленный на дополнительной каретке, привод перемещения механической руки и исполнительного органа, имеющий передачу с гибкой связью, выполненную в виде системы блоков, барабана и гибких элементов, а также систему управления, отличающийся тем, что, с целью упрощения системы управления, привод перемещения механической руки и исполнительного органа снабжен индивидуальными двигателя.ми и системой двукратных полиспастов, причем подвижные блоки этих полиспастов объединены в группы, количество блоков в которых соответствует числу степеней подвижности, и кинематически соединены с соответствующими индивидуальными двигателями.
/J 3
фиг.1
| Манипулятор портального типа | 1985 |
|
SU1310199A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
| Аппарат для сжигания нефти | 1920 |
|
SU985A1 |
