11
Изобретение относится к строенню, а именно к манипуляторам, и может быть использовано для автоматизации элементов научно-исследовательской и экспериментальной работы. Цель изобретения - упрощение конструкции за счет сокращения количества приводных двигателей.
На фиг.1 изображен манипулятор, общий вид; на фиг.2 - схема привода. Манипулятор состоит из продольной 1 и поперечной 2 кареток и механической руки 3, на которой смонтирован барабан 4 с датчиком (исполнительным органом) 5, установленным с возможностью взаимоде 1ствия с изделием 6. На барабане 4 закреплены гибкий тяговый орган 7 с амортизатором и гибкий элемент 8 привода.
На каретке 1 закреплены гибкие элементы 9 и 10, на каретке 2 - гибкие элементы 11 и 12, на руке 3 - гибкие элементы 13 и 14.
На силовом валу 15 приводного двигателя 16 установлены барабаны 17-20 с муфтами 21-24 предельного момента, связанными зубчатыми передачами 25-2 с шаговыми двигателями 29-32, соединенными с системой 33 управления, импульсы которой по координатам X, Y, Z и углу / регистрирует счетчик 34 импульсов и вводит на информационную систему (табло) 35. Натяжение канатов осуществляет механизм 36.
Устройство работает следуюошм образом.
В исходном положении включается двигатель 16. Затем система 33 управления включает шаговые двигатели 29-32 на статический синхронизирующий момент, т.е. валы этих двигателей находятся в заторможенном состоянии. Муфты 21-24 отключают барабаны 17-20 от силового вала 15.
Для перемещения по углу оО на обмотку управления шагового двигателя 29 подаются импульсы с системы 33 управления, которые поворачивают вал этого двигателя и фиксируют его. При
992
этом преодолевается сопротивление муфты 21 предельного момента, и барабан 17 проворачивается на валу 15, перемещая канат 8. Количество импульсов системы 33 управления регистри- руется счетчиком 34 импульсов.
Для перемещения исполнительного органа 5 по координате Y включаются шаговые двигатели 29 и 30. При этом
взаимодействие шагового двигателя 30 с муфтой 22 и барабана 18 с валом 15 происходит, как и при перемещении по углу об .
Для перемещения по координате Z включаются три шаговых двигателя 29, 30 и 32, а по координате X - четыре шаговых двигателя 29-32.
20
Формула изобретения
Манипулятор портального типа, содержащий основание, подвижно смонтированные на нем и последовательно расположенные продольную и поперечную каретки и механическую руку с исполнительным органом, приводы перемещения руки по соответствующим координатам, каждый из которых содержит
кинематическую передачу с гибкой связью, выполненную в виде системы блоков, барабанов и гибких элементов, и систему управления, отличающийся тем, что, с целью упрощения конструкции за счет сокращения количества приводных двигателей, барабаны передачи с гибкой связью расположены на общем силовом валу с возможностью вращения относительно него
и имеет возможность соединения с ним с помощью дополнительно введенных муфт предельного момента, одна из полумуфт каждой из которых жестко связана с указанным валом, а другая - с барабаном, причем последняя кинематически связана с соответствующим дополнительно установленным индивидуальным шаговым двигателем, связанным с системой управления.
CU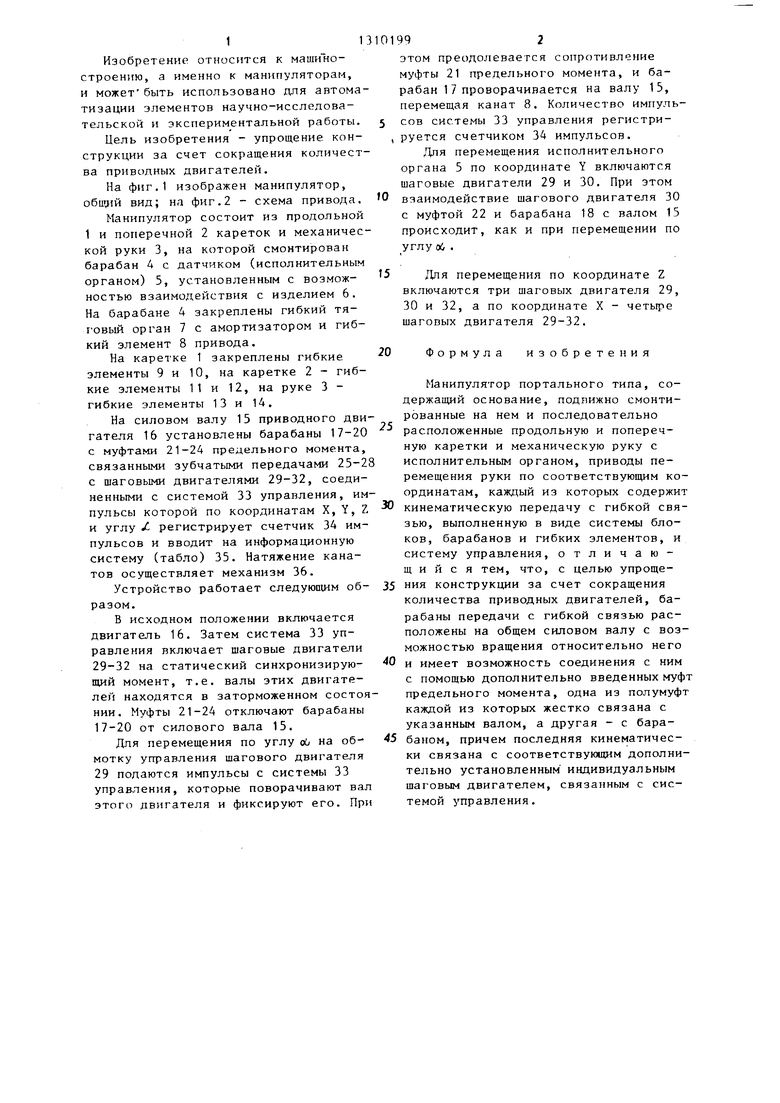
| название | год | авторы | номер документа |
|---|---|---|---|
| Манипулятор портального типа | 1987 |
|
SU1521578A1 |
| ДВУХКОМПОНЕНТНЫЙ ДИСТАНЦИОННЫЙ МАНИПУЛЯТОР | 2005 |
|
RU2363570C2 |
| Исполнительный орган робота | 2015 |
|
RU2653397C2 |
| Следящий электропривод с барабанно-роликовым исполнительным элементом | 2023 |
|
RU2815271C1 |
| УСТРОЙСТВО ДЛЯ РЕЗКИ РЫБНОГО ФИЛЕ | 2015 |
|
RU2599622C1 |
| МАНИПУЛЯТОР | 1987 |
|
SU1483801A1 |
| Автономный мобильный модуль роботизированного хирургического инструмента | 2019 |
|
RU2715684C1 |
| Исполнительный орган манипулятора | 1983 |
|
SU1123227A1 |
| Беспилотный летательный аппарат для отбора почвенных образцов | 2024 |
|
RU2828894C1 |
| КАБЕЛЬНЫЙ БАРАБАН ДЛЯ НАМОТКИ-РАЗМОТКИ СИЛОВОГО КАБЕЛЯ | 2024 |
|
RU2835173C1 |
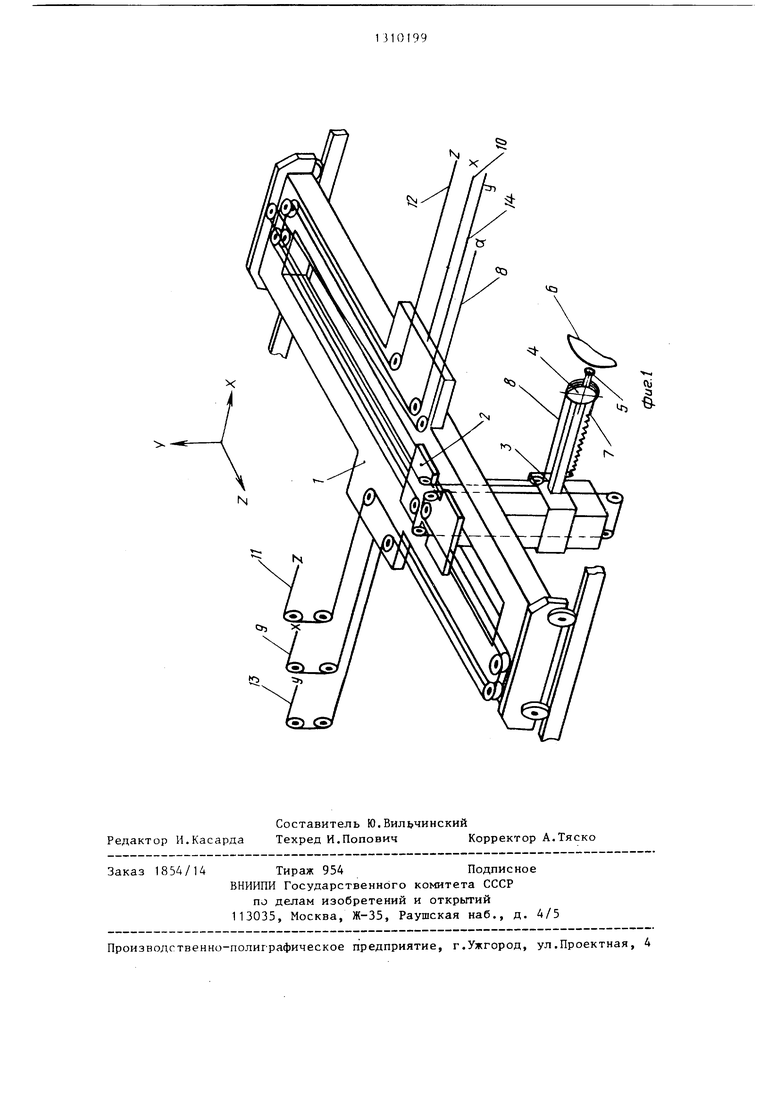
Изобретение относится к машиностроению и может быть использовано для автоматизации элементов научно- исследовательской и экспериментальной работы за счет программного перемещения исполнительного органа (датчика) . Целью изобретения является упрощение конструкции манипулятора за счет сокращения количества приводных двигателей. При включении силового двигателя 16 вращается общий силовой Fja:i 15, на котором смонтированы с возможностью поворота относительно него барабаны 17-20 и муфты 21-24 преде.г ьного момента, о;ш;; из полу- MyitiT каждой из которых жестко связана с палом 15, а другая - г соответствующим барабаном, причем последняя кинематически связана через передачи 25-2(Я с соответствующим шаговым двигателем. По команде от системы 33 уп- рапления, включающей в себя счетчик 34 импульсов и табло 35, роторы шаговых двигателей поворачиваются на заданный угол, и через муфты 21-24 поворачиваются соответствую1цие барабаны и далее через гибкие элементы 8-14 осуществляется перемещение исполнительного органа. 2 ил. S (Л Ф 29 36 СО со 30 31 Ъ J2 физ2
Редактор Н.Касарда Заказ 1854/14
Составитель Ю.Вильчинский
Техред И.Попович Корректор А.Тяско
Тираж 954Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д. 4/5
Производственно-полиграфическое предприятие, г.Ужгород, ул.Проектная, 4
| Манипулятор | 1978 |
|
SU770784A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
