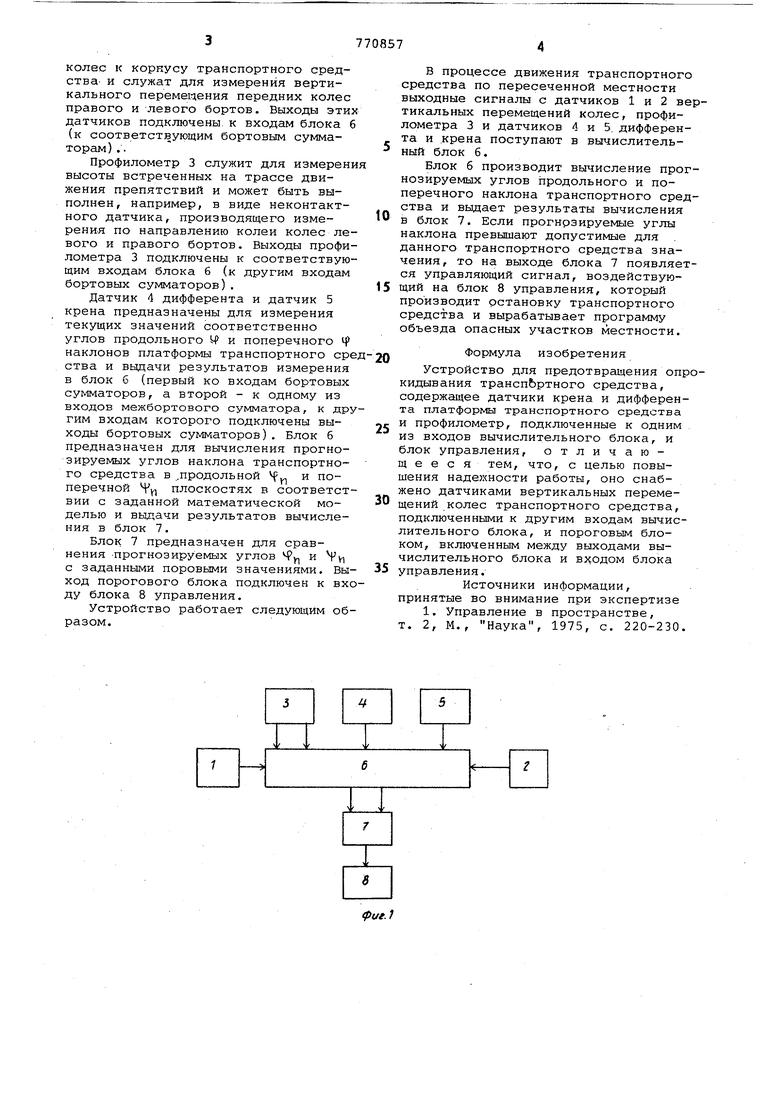
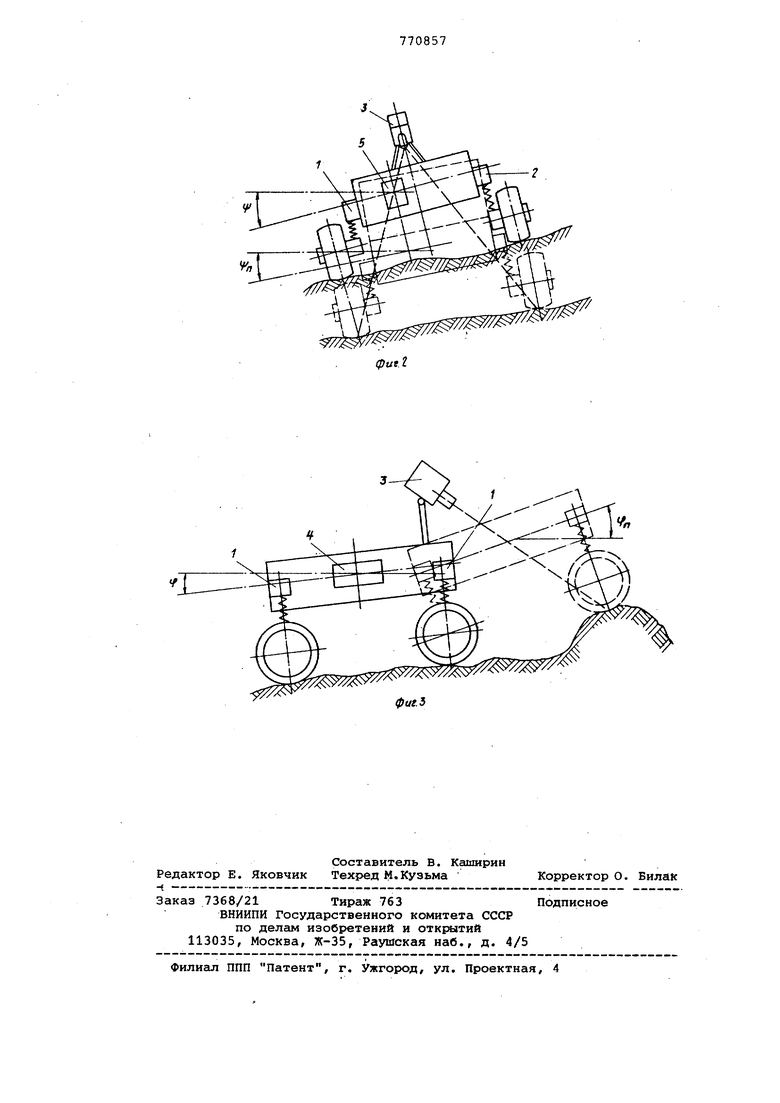
Изобретение относится к транспор ной технике, в частности к автомати ческим самоходным транспортным сред ствам, снабженным устройствами, обе печивающими их безопасное автономно движение по пересеченной местности. Известно устройство для предотвращения опрокидывания транспортного средства, содержащее датчики крена и дифферента платформы транспортного средства и профилометр, подключенные к одним из входов вычислительного блока, и блок управле ния 1. В этом устройстве используется в качестве профилометра передний модуль в совокупности с датчиками его положения, прогнозирующий наклон аппарата в продольной плоскости (дифферент) и измерякщий неровности поверхности. Недостатком указанного техническ го решения является низкая надежнос Объясняется это отсутствием возможн ти прогнозирования крена и существенной погрешностью в прогнозировании дифферента, обусловленной тем что передний модуль оценивает рельеф не по колее згщних модулей транспортного средства. Кроме того, дополнительная погрешность может появиться при наличии упругой подвески движителей. Цель изобретения - повышение надежности работы устройства. Это достигается тем, что предлагаемое устройство снабжено датчиками вертикальнБк перемещений колес транспортного средства, подключенными к другим входам вычислительного блока, и пороговым блоком, включенным между выходами выгчислительного блока и входом блока управления. На фиг. 1 изображе.на структурная схема устройства; на фиг. 2 - транспортное средство, вид спереди; на фиг. 3 - то же, вид сбоку. На фиг. 2 и 3 сплошными линиями показано текущее положение транспортного средства, пунктирными - прогнозируемое. Устройство для предотвращения опрокидывания транспортного средства содержит датчики 1 и 2 вертикальных перемещений колес, профилометр 3, датчик 4 дифферента, датчик 5 крена, вычислительный блок 6, в состав которого входят брртовые и межбортовой сумматоры (на фигурах не показаны). Датчики 1 и 2 устанавливаются в месте крепления подвески передних колес к корпусу транспортного средства- и служат для измерения вертикального перемещения передних колес правого и левого бортов. Выходы этих датчиков подключены к входам блока б (к соответствующим бортовым сумматорам) .. Профилометр 3 служит для измерени высоты встреченных на трассе движения препятствий и может быть выполнен, например, в виде неконтактного датчика, производящего измерения по направлению колеи колес левого и правого бортов. Выходы профилометра 3 подключены к соответствующим входам блока б (к другим входам бортовых сумматоров). Датчик 4 дифферента и датчик 5 крена предназначены для измерения текущих значений соответственно углов продольного Ч и поперечного Ч наклонов платформы транспортного сре ства и вьвдачи результатов измерения в блок 6 (первый ко входам бортовых сумматоров, а второй - к одному из входов межбортового сумматора, к дру гим входам которого подключены выходы бортовых сумматоров). Блок б предназначен для вычисления прогнозируемых углов наклона транспортного средства в .продольной и поперечной Hvi плоскостях в соответст вии с заданной математической моделью и выдачи результатов вычисления в блок 7. Блок 7 предназначен для сравнения -прогнозируемых углов и Yy с заданными поровыми значениями. Вы ход порогового блока подключен к вх ду блока 8 управления. Устройство работает следующим об разом. В процессе движения транспортного средства по пересеченной местности выходные сигналы с датчиков 1 и 2 вертикальных перемещений колес, профилометра 3 и датчиков 4 и 5. дифферента и крена поступают в вычислительный блок б. Блок б производит вычисление прогнозируемых углов продольного и поперечного наклона транспортного средства и выдает результаты вычисления в блок 7. Если прогнрзируемые углы наклона превышают допустимые для данного транспортного средства значения, то на выходе блока 7 появляется управляющий сигнал, воздействующий на блок 8 управления, который производит остановку транспортного средства и вырабатывает программу объезда опасных участков местности. Формула изобретения Устройство для предотвращения опрокидывания транспЬртного средства, содержащее датчики крена и дифферента платформы транспортного средства и Профилометр, подключенные к одним из входов вычислительного блока, и блок управления, отличающееся тем, что, с целью повышения надежности работы, оно снабжено датчиками вертикальных перемещений колес транспортного средства, подключенными к другим входам вычислительного блока, и пороговым блоком, включенным между выходами вычислительного блока и входом блока управления. Источники информации, принятые во внимание при экспертизе 1. Управление в пространстве, т. 2, М., Наука, 1975, с. 220-230.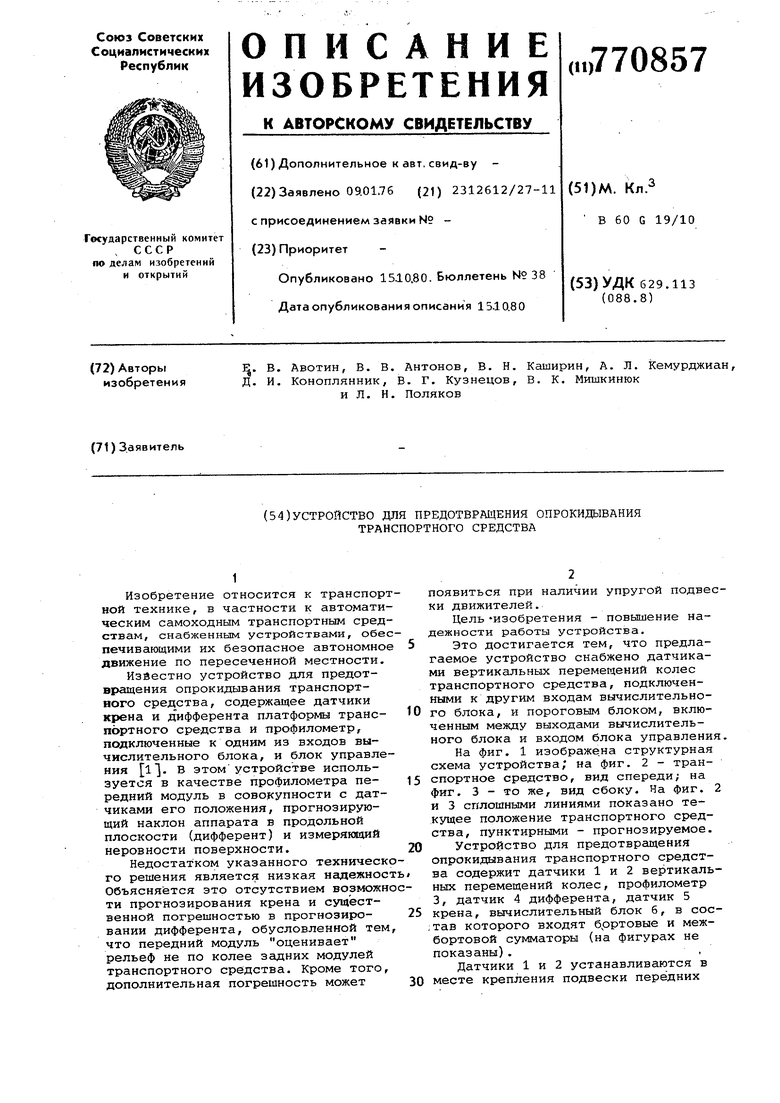
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для предотвращения опрокидывания транспортного средства | 1985 |
|
SU1243963A2 |
| Устройство прогнозирования положения транспортного средства при движении по пересеченной местности | 1980 |
|
SU893595A1 |
| Устройство для предотвращения столкновения автоматического транспортного средства с препятствиями | 1982 |
|
SU1062758A1 |
| Устройство для предотвращения бокового крена транспортного средства | 1987 |
|
SU1507599A1 |
| Способ прогнозирования положенияТРАНСпОРТНОгО СРЕдСТВА | 1979 |
|
SU823180A1 |
| Устройство для измерения рельефа местности | 1977 |
|
SU735918A2 |
| ЛАЗЕРНОЕ УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ КООРДИНАТ РЕЛЬЕФА МЕСТНОСТИ С ПОДВИЖНОГО НОСИТЕЛЯ | 1977 |
|
SU1840747A1 |
| СПОСОБ ПРЕДОТВРАЩЕНИЯ ОПРОКИДЫВАНИЯ АВТОМОБИЛЯ | 2018 |
|
RU2702476C1 |
| СИСТЕМА ПРЕДОТВРАЩЕНИЯ ОПРОКИДЫВАНИЯ АВТОМОБИЛЯ | 2018 |
|
RU2702877C1 |
| Способ предотвращения опрокидывания автопоезда | 2023 |
|
RU2811998C1 |
5
