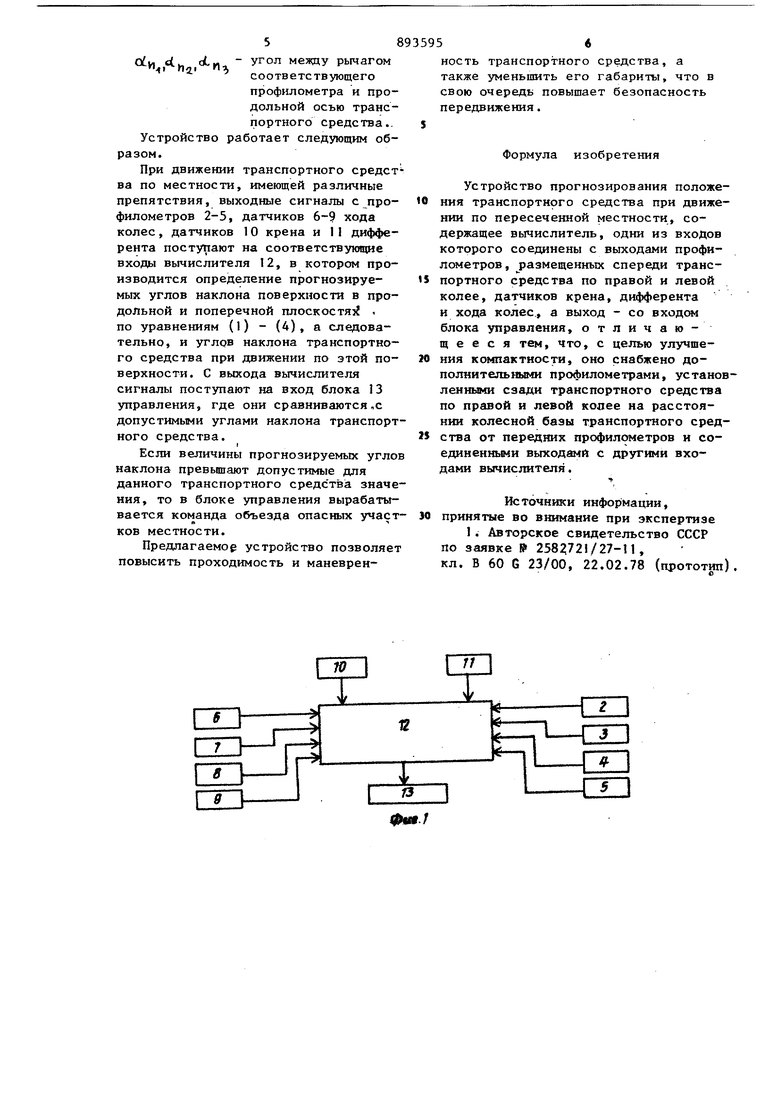
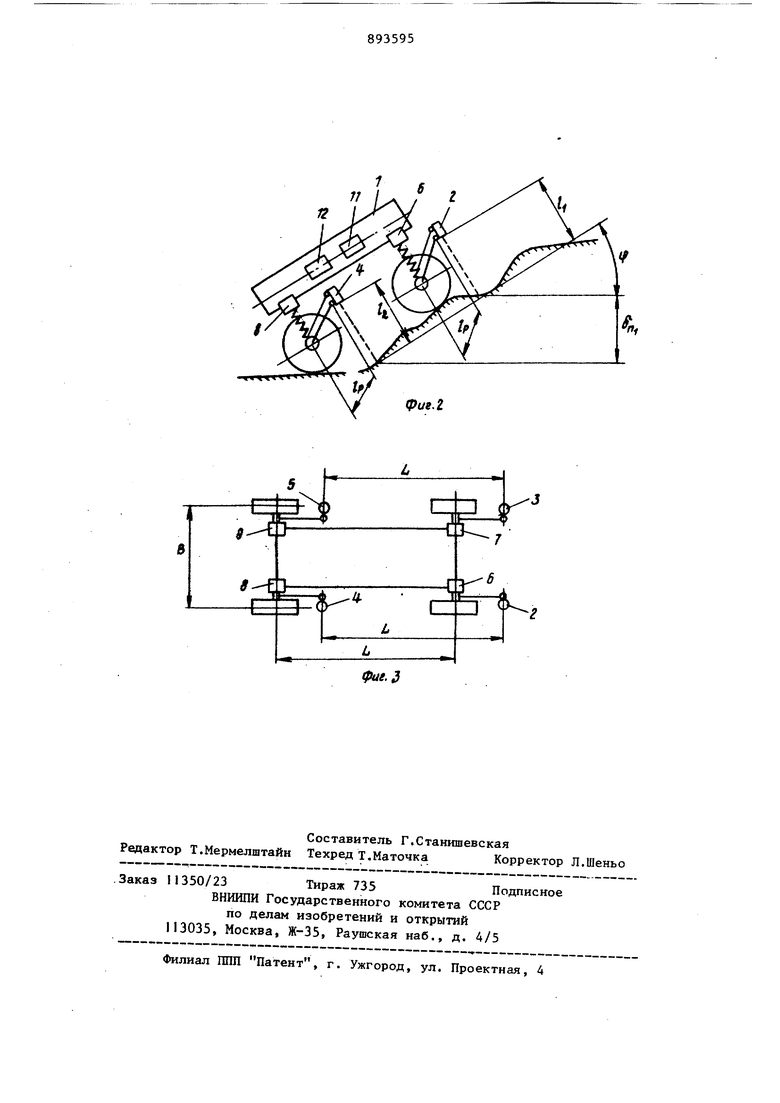
ПО правой и левой колее перед перед ними и задними колесами, датчиков 6-9 хода колес, транспортного средства, датчика 10 крена, датчика 11 дифферента, вычислителя 12 и блока 13 управления. Профилометры 2-5 служат для измерения высоты образований рельефа, расположенных по трас се движения перед транспортным средством в направлении будущей колеи передних и задних колес. Они могут быть укреплены на подвесках колес транспортного средства .с помощью механических устройств, например пара ллелограммных рычажных механизмов снабженных индивидуальными приводами позволяющими установить профилометры в рабочее положение, а именно впереди колеса {-для обеспечения движения транспортного средства) и сзади колеса (для обеспечения движения транспортного средства назад). Конструктивно Профилометры выполнены в виде высотометров, построенных, например, на базе лазерных даль нометров, работающих для измерения высот в диапазоне 0,5+7 м. Установка их производится таким образом, чтобы расстояние между профилометрами передних или задних колес равнялось величине колеи транспортного средства, а расстояние между осями профилометров передних и задних колес равнялось величине колесной базы транспортного средства После перевода профилометров во второе рабочее положение (для движения транспортного средства назад) расстояние между их осями должно сохраняться равным величине колесной базы. Величина выноса оси профиломет ра перед колесом должна определяться исходя из величины тормозного пути транспортного средства таким образом чтобы в случае обнаружения опасности последнее могло остановиться пере препятствием. Датчики 6-9 хода колес устанавливаются на подвесках колес транспортного средства и служат для измерения текущего вертикального перемещения этих колес. . Датчик 10 крена и датчик 11 дифферента предназначены соответственно для измерения текущего значения углов поперечного и продольного наклона транспортного средства и выдачи результатов измерения в вычислитель 1 2. Вычислитель обрабатывает информацию, поступающую от профилометров 2-5, датчиков 6-9 хода колес и датчиков 10 крена и 11 дифферента в соответствии с заданной математической программой. Сигналы с выхода вычислителя 12 поступают на вход блока 13 управления, который предназначен для выработки команд управления транспортным средством в зависимости от величины сигналов, поступающих с вычислителя. Безопасность транспортного средства можно обеспечить, располагая в каждый момент времени прогнозируемыми углами наклона У и f . транспортного средства соответственно в продольной плоскости под правым и левым бортами и в поперечной плоскости. Прогнозируемый угол наклона поверхности в продольной и поперечной плоскостях определяется соответственно из соотнощений 1 arc sin arc sinгде L -колесная база транспортного средства; -ширина колеи; (f - перепад высот рельефа между точками контакта лучей соответствующих профилометров с грунтом, определяемый из соотношения для угла наклона в продольной плоскости: ( (A2-A)COS«PC064 4-ep si«t lhi f)- f -eiw (of v,-Hf )3 -b (ti-e2)cos VcosY и для угла наклона в поперечной плоскости:Wi(V i -V pSiii(ih5-EpSiMoi;,)x где Д, , Д, код колес, измеряемый соответеТВугадим датчиком хода колес; длина рычага профиломе тр а , расстояние от соответствующего профилометра до рельефа И.. угол мезкду рычагом соответствующего профилометра и продольной осью транспортного средства.. Устройство работает следующим образом. При движении транспортного средст ва по местности, имеющей различные препятствия, выходные сигналы с профилометров 2-5, датчиков 6-9 хода колес, датчиков 10 крена и 11 дифферента поступают на соответствующие входы вычислителя 12, в котором производится определение прогнозируемых углов наклона поверхности в продольной и поперечной плоскостяз по уравнениям (1) - (4), а следовательно, и углов наклона транспортного средства при движении по этой поверхности. С выхода вычислителя сигналы поступают на вход блока 13 управления, где они сравниваются,с допустимыми углами наклона транспортного средства. Если величины прогнозируемых углов наклона превышают допустимые для данного транспортного средства значения, то в блоке управления вырабатывается команда объезда опасных участков местности, Предлагаемо, устройство позволяет повысить ПРОХОДИМОСТЬ и маневрен5ность транспортного средства, а также уменьшить его габариты, что в свою очередь повышает безопасность передвижения. Формула изобретения Устройство прогнозирования положения транспортного средства при движении по пересеченной местности, содержащее вычислитель, одни из входов которого соединены с выходами профилометров, размещенных спереди транспортного средства по правой и левой колее, датчиков крена, дифферента и хода колес, а выход - со входсм блока управления, отличающееся тем, что, с целью улучшения компактности, оно снабжено дополнительными профилометрами, установленными сзади транспортного средства по правой и левой колее на расстоянии колесной базы транспортного средства от передних профилометров и соединенньми выходами с другими входами вычислителя. Источники информации, принятые во внимание при экспертизе по з;я ГГ251272 77 п 1. Авторское свидетельство СССР л. В воГ23 1 : ; 2 о;:;в (прототип)
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ прогнозирования положенияТРАНСпОРТНОгО СРЕдСТВА | 1979 |
|
SU823180A1 |
| Устройство для предотвращения опрокидывания транспортного средства | 1976 |
|
SU770857A1 |
| Устройство для предотвращения опрокидывания транспортного средства | 1985 |
|
SU1243963A2 |
| Способ прогнозирования положения транспортного средства | 1980 |
|
SU935324A1 |
| Устройство для предотвращения столкновения автоматического транспортного средства с препятствиями | 1982 |
|
SU1062758A1 |
| Устройство для измерения рельефа | 1976 |
|
SU649950A1 |
| Устройство для измерения рельефа местности | 1977 |
|
SU735918A2 |
| Устройство для определения профиля местности перед транспортным средством | 1981 |
|
SU1024719A1 |
| Устройство для измерения рельефа местности | 1982 |
|
SU1089414A2 |
| Устройство для измерения профиля местности | 1976 |
|
SU661235A1 |
L2J
1Z
tpue.Z
,
