2. Устройство по п. 1, о т л и- чающееся тем, что вычислитель текущей скорости содержит последовательно соединенные формирователь времени измерения, элемент совпадения счетчик импульсов скорости и определитель скорости, узел начальной установки, вход которого подключен к выходу формирователя времени измеI
Изобретение относится к информационным устройствам об окружающих условиях эксплуатации транспортных средств и может быть использовано для обеспечения безопасности автома- тических транспортных средств, например луноходов, в процессе перемещения; их по пересеченной поверхности.
Цель изобретения - повышение надежности функционирования устройства.
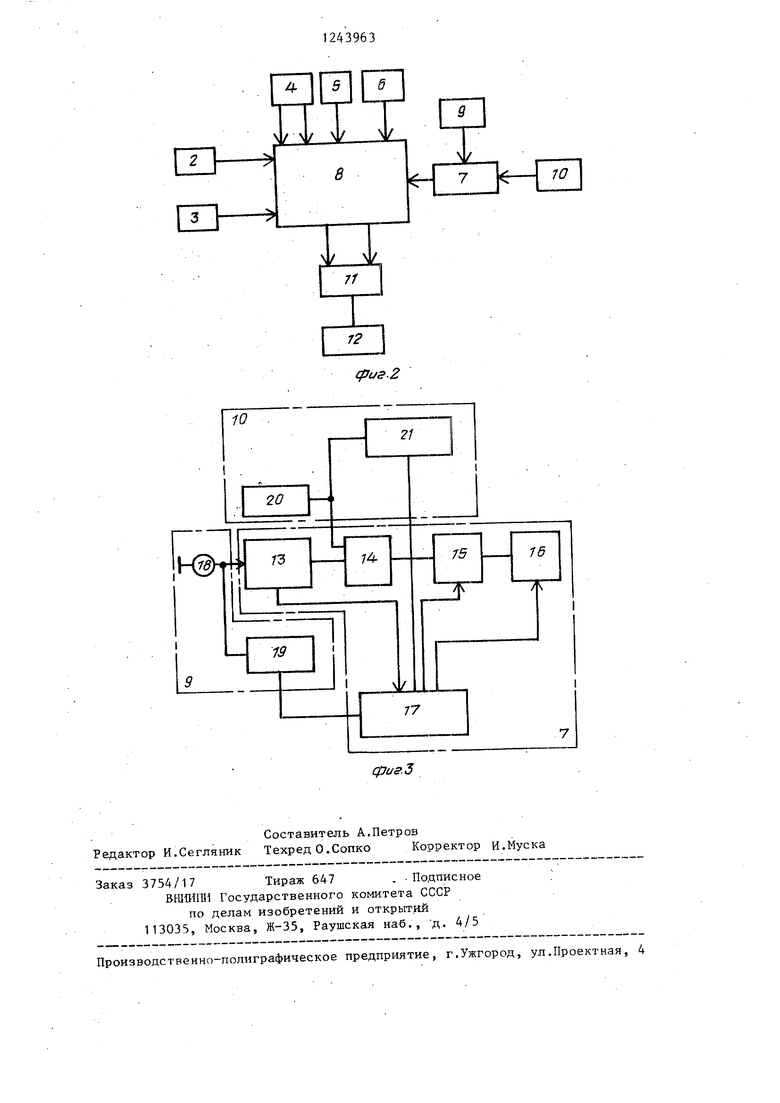
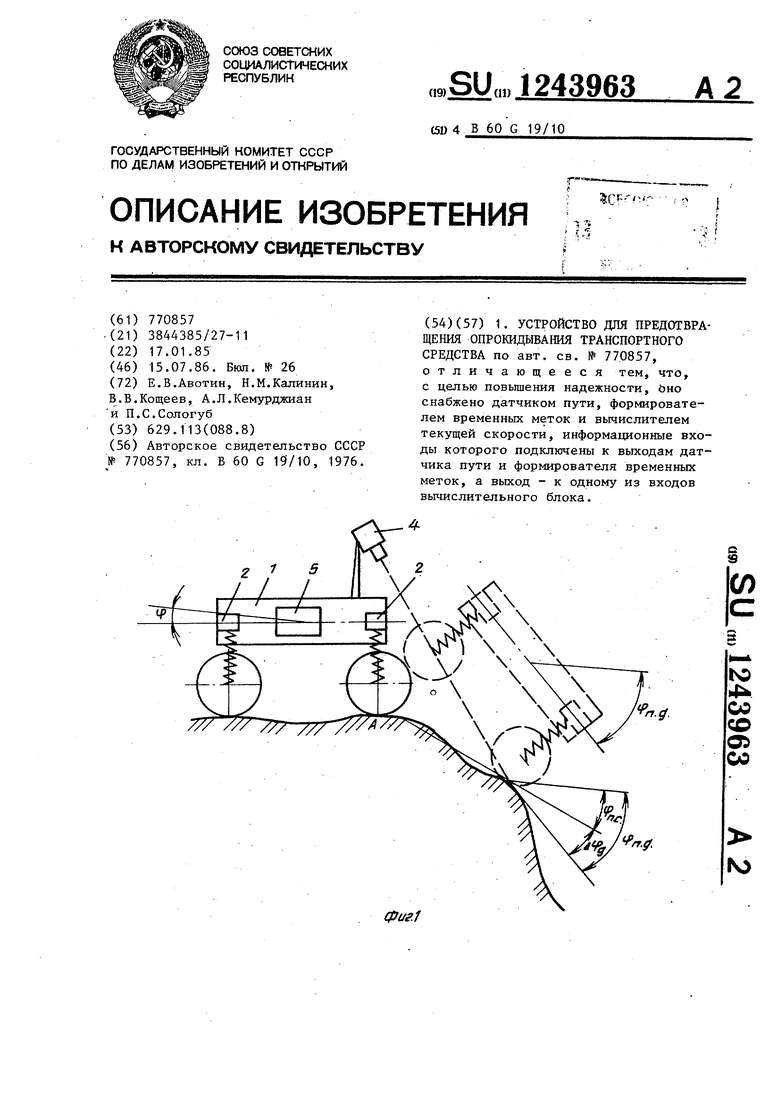
На фиг. 1 показано транспортное средство в динамическом режиме дви-. жения (например, при т-орможении) ; на фиг. 2 - блок-схема устройства; на фиг. 3 - структурная схема датчика пути, формирователя временных меток и вычислителя текущей скорости.
Устройство для предотвращения опро кидывания транспортного средства 1 содержит датчики 2 и 3 ввртикал ьного хода колес правого и левого бортов, профилометр 4, датчик 5 дифферента, датчик 6 крена, вычислитель 7 текущей скорости, выходы которых подключены к входам вычислительного блолса 8 Информационные входы вычислителя 7 подключены соответственно к выходам датчика 9 пути и формирователя 10 вре менных меток. Выходы вычислительного блока 8 подключены к входам порогово- го блока 11, выход которого подключен к входу блока 12 управления.
При этом вычислитель 7 текущей скорости содержит последовательно соединенные формирователь 13 време- ни измерения, элемент 14 совпадения, счетчик 15 импульсов скорости и определитель 16 скорости, а также .узел 17 начальной установки, вход которого подключен к формирователю 13, а вы- ходы - соответственно к установочному входу счетчика 15 импульсов скорения, а выходы - соответственно к установочному входу счетчика импульсов скорости и разрешающему входу определителя скорости, при этом информационными входами вычислителя текущей скорости являются соответственно вход формирователя времени измерения -И один из входов элемента совпадения.
рости и разрешающему входу определителя 16 скорости, при этом информационными входами вычислителя 7 являются соответственно вход формирователя 13 и один из входов элемента 14
Датчики 2 и 3 устанавливаются на корпусе транспортного средства и через трос или торсион крепятся к подвеске передних колес. Они служат для измерения вертикального перемещения передни:х колес правого .и левого бортов.
Профилометр 4 служит для измерения высот рельефных образований, рас положенньп ; по трассе движения перед транспортным средством в направлении будущей колеи передних колес правого и левого бортов, Профилометр может быть вьпгюлнен,. например, в виде неконтактного датчика, производящего измерения по направлению колеи колес правого и левого бортов.
Датчик 5 дифферента и датчик 6 крена предназначены для измерения текущих значений соответственно угло продольного Ч и поперечного Ч наклонов платформы транспортного средства и выдачи результатов измерений в блок 8.
Датчик 9 пути представляет собой свободяокатящееся колесо, связанное с датчиком 18 частоты вращения, выход которого подключен к входу счетчика 19 импульсов пути, установочньй вход которого подключен к узлу 17, Формирователь 10 представляет собой кварцевьш генератор 20 с делителем частоты на выходе и счетчик . 1 временных меток, установочный вход которого подключен к выходу узла 17.
Структура вычислительного блока 8 зависит от типа движителя (колесный
или гусеничный), количества осей транспортного средства, особенностей решения задачи прогнозирования положения транспортного средства.
В состав.вычислительного блока 8 должны входить следующие узлы: тригонометрические блоки типа sin, cos, arcsin, блоки произведения, промежуточные и межбортовые сумматоры. Причем указанный набор блоков может ис- пользоваться как для расчета прогнозированного крена, так и дифферента по направлению движения колес правого и левого бортов. Выход вычислителя 7 подключают к входам одного из блоков произведения вычислительного блока 8.
Устройство работает следующим образом.
Измерение скорости в вычислителе 7 производится путем замера периода следования импульсов, поступающих с датчика 18 частоты вращения свобод- нокатящегося колеса, с последующим вычислением скорости прохождения этих импульсов. Формирователь 13 измеряет период следования импульсов, поступающих с датчика 18. Число импуль- сов N, прошедшее с генератора 20 через элемент 14 совпадения прямо пропорционально периоду следования им- пульсов. Число импульсов подсчитывается счетчиком 15 импульсов скорости, а определителем 16 производится определение скорости V в соответствии с выражением
v
.где С - постоянная масштабирования.
Узел 17 начальной установки осу- ществляет начальную установку счетчи ков 15, 19 и 21 и управляет работой определителя 16.
В вычислительном блоке 8 по сигналам с датчиков 2,3,5 и 6 и профило- метра 4 вычисляются прогнозируемые углы наклона для статического состояния равновесия транспортного средства в вертикально-продольной плоскости (дифферент) и вертикально-поперечной плоскости (крен) .
Если при движении транспортного средства со скоростью V, в процессе
10 о, f5 .
12439634
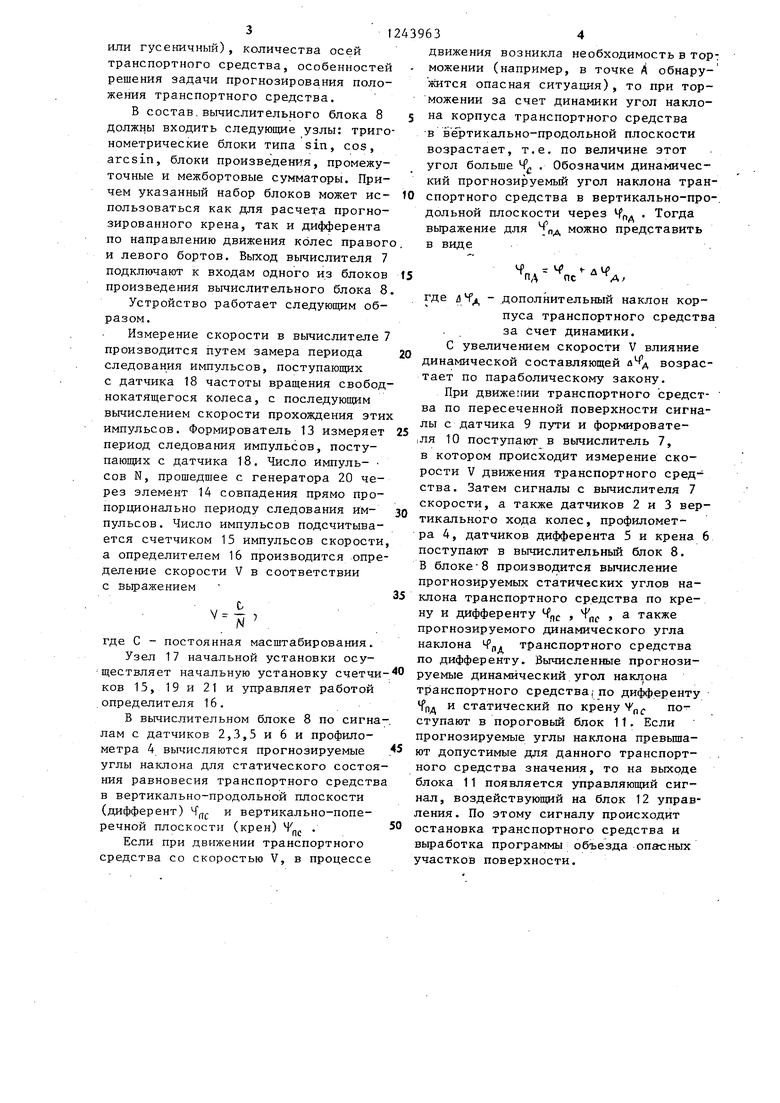
движения возникла необходимость в тор можении (например, в точке А обнаружится опасная ситуация), то при торможении за счет динамики угол накло- 5 на корпуса транспортного средства
10 5
0 5 о
в вертикально-продольной плоскости возрастает, т.е. по величине этот угол больше Ч . Обозначим динамический прогнозируемый угол наклона транспортного средства в вертикально-про-. дольной плоскости через Тогда вьфажение для пд можно представить в виде
Ч 4 1- д Ч ПА ПС М
где и f - дополнительный наклон корпуса транспортного средства за счет динамики. С увеличением скорости V влияние динамической составляющей возрастает по параболическому закону.
Дри движегши транспортного средства по пересеченной поверхности сигналы с датчика 9 пути и формировате- |Ля 10 поступают в вычислитель 7, в котором происходит измерение скорости V движения транспортного средства. Затем сигналы с вычислителя 7 скорости, а также датчиков 2 и 3 вертикального хода колес, профиломет- ра 4, датчиков дифферента 5 и крена 6 поступают в вычислительный блок 8. В блоке 8 производится вычисление прогнозируемых статических углов наклона транспортного средства по крену и дифференту Ч пс , f.
ПС пС
а также
40
. .5
50
прогнозируемого динамического угла наклона Ч . транспортного средства по дифференту. Вычисленные прогнозируемые динамический угол наклона транспортного средства, по дифференту fp и статический по крену У поступают в пороговый блок 11. Если прогнозируемые углы наклона превьшга- ют допустимые для данного транспортного средства значения, то на выходе блока 11 появляется управляющий сигнал, воздействующий на блок 12 управления. По этому сигналу происходит остановка транспортного средства и выработка программы объезда опасных участков поверхности.
cpus.2
Составитель А.Петров Редактор И.Сегляник Техред О.СопкоКорректор
Заказ 3754/17Тираж 647, .Подписное
ВШШПН Государственного коми;тета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д. 4/5
Производственно-полиграфическое предприятие, г.Ужгород, ул.Проектная, 4
фиг.З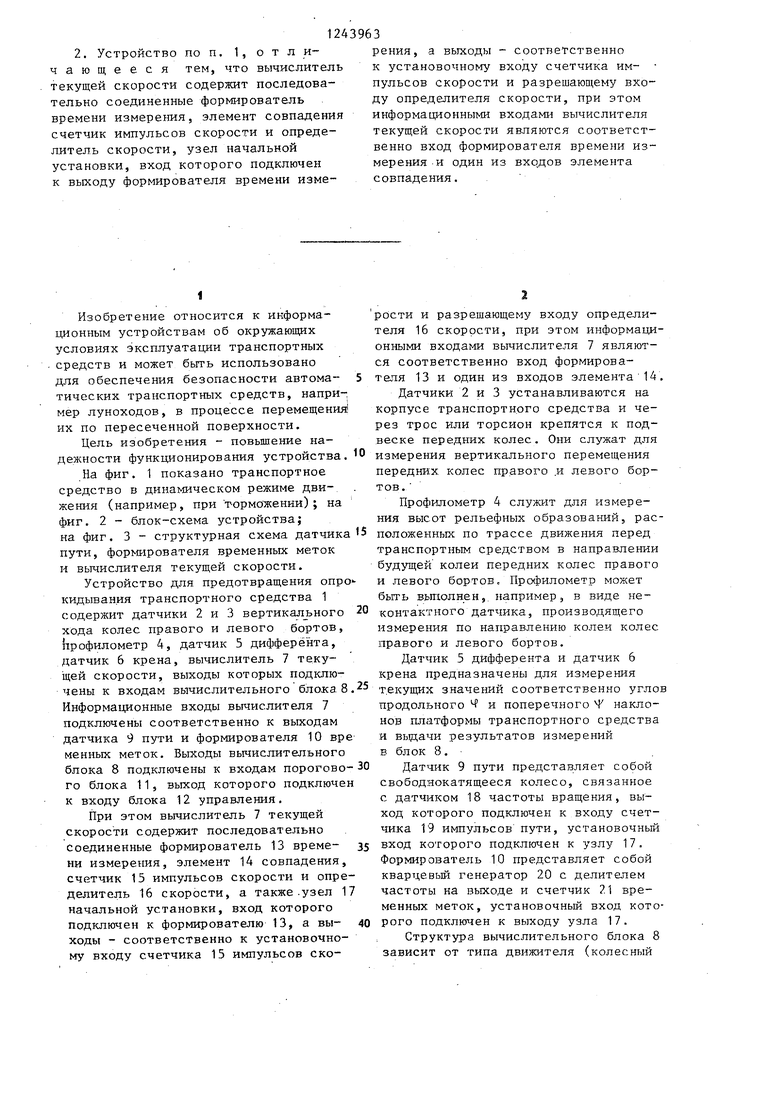
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство прогнозирования положения транспортного средства при движении по пересеченной местности | 1980 |
|
SU893595A1 |
| Устройство для предотвращения опрокидывания транспортного средства | 1976 |
|
SU770857A1 |
| Устройство для предотвращения столкновения автоматического транспортного средства с препятствиями | 1982 |
|
SU1062758A1 |
| Способ прогнозирования положенияТРАНСпОРТНОгО СРЕдСТВА | 1979 |
|
SU823180A1 |
| Способ прогнозирования положения транспортного средства | 1980 |
|
SU935324A1 |
| СПОСОБ ПРЕДУПРЕЖДЕНИЯ СТОЛКНОВЕНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА С РЕЛЬЕФОМ МЕСТНОСТИ И УСТРОЙСТВО НА ЕГО ОСНОВЕ | 2006 |
|
RU2301456C1 |
| Устройство для предотвращения бокового крена транспортного средства | 1987 |
|
SU1507599A1 |
| СИСТЕМА АВТОМАТИЗИРОВАННОГО УПРАВЛЕНИЯ ТОРМОЗНЫМ КРЮКОМ И ДВИГАТЕЛЕМ ПРИ ПОСАДКЕ ЛЕТАТЕЛЬНОГО АППАРАТА НА ПАЛУБУ КОРАБЛЯ | 1996 |
|
RU2119440C1 |
| СПОСОБ ПРЕДУПРЕЖДЕНИЯ СТОЛКНОВЕНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА С ЗЕМЛЕЙ И УСТРОЙСТВО НА ЕГО ОСНОВЕ | 2004 |
|
RU2262746C1 |
| Устройство для измерения рельефа | 1976 |
|
SU649950A1 |
| Устройство для предотвращения опрокидывания транспортного средства | 1976 |
|
SU770857A1 |
| Способ получения молочной кислоты | 1922 |
|
SU60A1 |
