ел о ел
QD QD
фиг.1
Изобретение относится к yCTpoi iCT- вам для предотпращения бокопого крена транспортного средства.
Цель изобретения - повышение эффективности действия устройства.
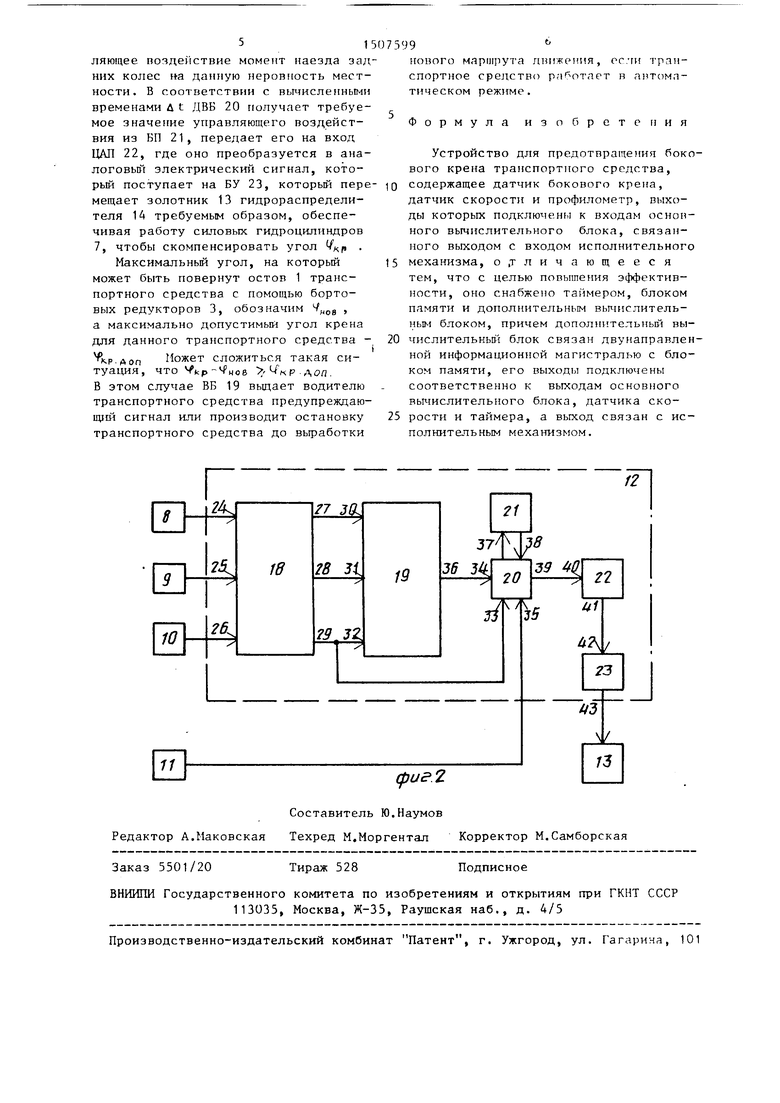
На фиг. 1 изображено средство с устройством для предотвращения его бокового крена; на фиг. 2 - блок-схема устройства.
Устройство для предотвращения бокового крена предназначено для транспортного средства (фиг.1), содержащего остов 1, задние ведущие колеса
18, первый 27, второй 28 и третий 29 выходы которого соединены с первым 30, вторым 31 и третьим 32 входами
ВК 19 Соответственно, причем третий выход ЛЦИ 18 соединен с вторым 33 входом ЛВБ 20, nepBbrfi 34 и третий 35 входы которого соединены с выходом 36 ВБ 19 и выходом таймера 11 соответственн. ДВВ 20 соединен двунаправленной информационной магистралью 37, 38 с БП 21, а выход 39 ЛВБ 20 соединен с входом 40 ЦЛП 22, выход 41 которого подключер к входу 42 ЬУ 23. Выход 43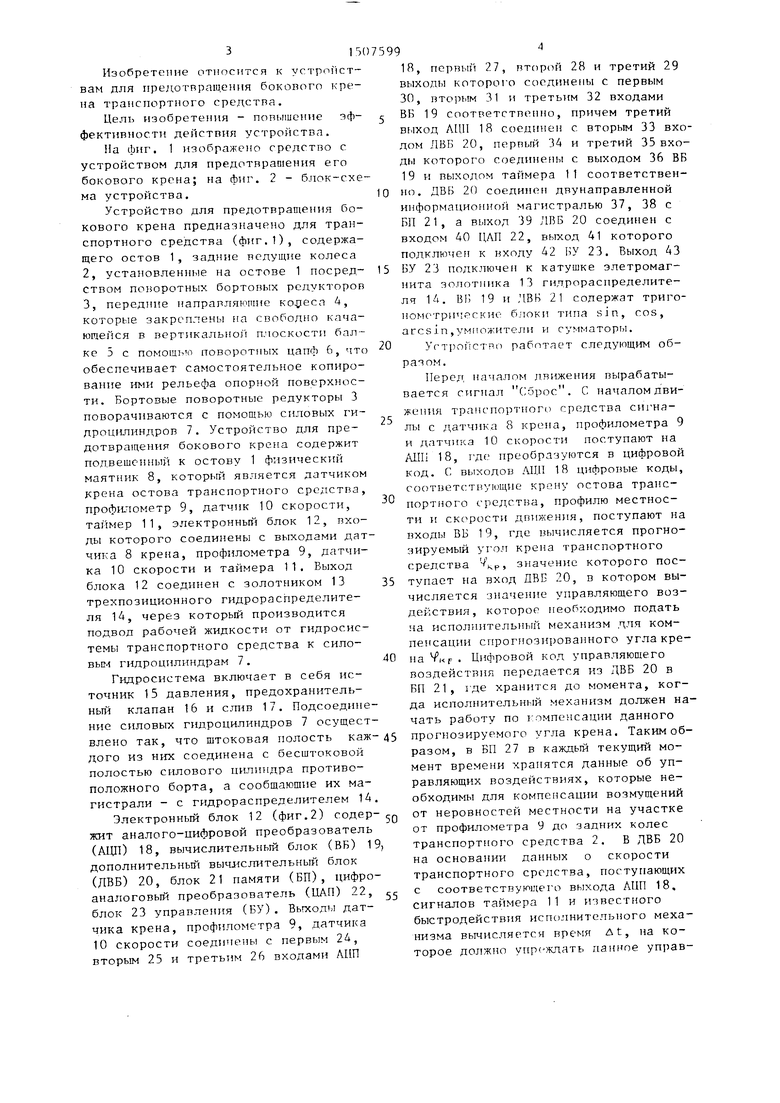
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для предотвращения бокового крена транспортного средства | 1990 |
|
SU1754492A1 |
| Крутосклонное колесное транспортное средство | 1988 |
|
SU1593986A1 |
| Устройство компенсации бокового крена транспортного средства | 1984 |
|
SU1220937A1 |
| Устройство стабилизации крутосклонного трактора | 1987 |
|
SU1556936A1 |
| Система управления положением остова транспортного средства | 1985 |
|
SU1324872A1 |
| Механизм поворота транспортного средства | 1981 |
|
SU992255A1 |
| Транспортное средство повышенной проходимости | 1983 |
|
SU1133127A1 |
| ТРАНСПОРТНОЕ СРЕДСТВО | 1990 |
|
RU2018453C1 |
| Устройство для предотвращения опрокидывания транспортного средства | 1976 |
|
SU770857A1 |
| Колесное транспортное средство для работы на склонах | 1981 |
|
SU986815A1 |
Изобретение относится к устройствам для предотвращения бокового крена транспортного средства. Цель изобретения - повышение эффективности. Устройство для предотвращения бокового крена предназначено для транспортного средства, содержащего остов 1, задние ведущие колеса 2, установленные на остове 1 посредством поворотных бортовых редукторов 3, передние направляющие колеса 4, закрепленные на свободно качающейся в вертикальной плоскости балке 5 с помощью поворотных цапф 6. Бортовые редукторы 3 поворачиваются с помощью силовых цилиндров 7. Устройство содержит датчик крена 8 остова транспортного средства, выполненный в виде физического маятника, профилометр 9, датчик скорости 10, таймер 11 и электронный блок 12. Входы блока 12 соединены с выходами датчика крена 8, профилометра 9, датчика скорости 10 и таймера 11. Выход блока 12 соединен с золотником 13 трехпозиционного гидрораспределителя 14, через который подводится жидкость от гидросистемы транспортного средства к силовым цилиндрам 7. 2 ил.
2, установленные на остове 1 посред- 15 БУ 23 подключен к катушке элетромаг- ством поворотных бортовых редукторов нита золотника 13 гидрораспределите3, передние направляющие 4, которые закреплены на свободно качающейся в вертикально плоскости балке 5 с помощь о поворотных цапф 6, что обеспечивает самостоятельное копирование ими рельефа опорной поверхности. Бортовые поворотные редукторы 3 поворачиваются с помощью силовых гидроцилиндров 7. Устройство для предотвращения бокового крена содержит подвещенный к остову 1 физический маятник 8, которьгй является датчиком крена остова транспортного средства, профилометр 9, датчик 10 скорости, таймер 11, электронньй блок 12, входы которого соединены с выходами датчика В крена, профилометра 9, датчика 10 скорости и таймера 11. Выход блока 12 соединен с золотником 13 трехпозиционного гидрораспределителя 14, через который производится подвод рабочей жидкости от гидросистемы транспортного средства к силовым гидроцилиндрам 7.
Гидросистема включает в себя источник 15 давления, предохранитель- ньш клапан 16 и слив 17. Подсоединение силовых гидроцилиндров 7 осуществлено так, что штоковая полость каж-45 прогнозируемого угла крена. Таким об- дого из них соединена с бесщтоковой полостью силового пилиндра противоположного борта, а сообщающие их магистрали - с гидрораспределителем 14.
Электронный блок 12 (фиг.2) содер- д жит аналого-цифровой преобразователь (АЦП) 18, вычислительный блок (ВБ) 19, дополнительный вычислительный блок (ДВБ) 20, блок 21 памяти (БП), цифро- аналоговый преобразователь (ЦАП) 22, блок 23 управления (БУ). Выходы датчика крена, профилометра 9, датчика 10 скорости соедиттены с первым 24, вторым 25 и третьим 26 входами ЛИП
разом, в БП 27 в каждый текущий момент времени хранятся данные об управляющих воздействиях, которые необходимы для компенсации возмущений от неровностер местности на участке от профилометра 9 до задних колес транспортного средства 2. В ДВБ 20 на основании данных о скорости транспортного средства, поступающих с соответствующего выхода АПП 18, сигналов таймера 11 и известного быстродействия исполнительного механизма вычисляется время At, на которое должно угЕрсждать ланное управ5
0
ля 14. ВБ 19 и ЛВН 21 содержат триго- ном( трические блоки типа sin, cos, arcs in,умножители и сумматоры.
0 Угтропстпо работает следующим образом.
Перед началом движения вырабатывается с нгнал Сорос. С началом движения транспортного средства сигналы с датчика 8 крена, профилометра 9 и датчика 10 скорости поступают на А1П1 18, где преобразуются в цифровой код. С выходов Л11Д1 18 цифровые коды, соответствующие крену остова транспортного средства, профилю местности и скс рости дпижения, поступают на входы ВБ 19, где вычисляется прогнозируемый угол крена транспортного средства значение которого пос5 тупает на вход ПВБ 20, в котором вычисляется значение управляющего воздействия, которое необходимо подать на исполнительный механизм для компенсации спрогнозированного угла кре0 на VKF . Цифровой код управляющего воздействия передается из ДВБ 20 в БЦ 21, где хранится до момента, когда исполнительный механизм должен начать работу по компенсации данного
прогнозируемого угла крена. Таким об-
разом, в БП 27 в каждый текущий момент времени хранятся данные об управляющих воздействиях, которые необходимы для компенсации возмущений от неровностер местности на участке от профилометра 9 до задних колес транспортного средства 2. В ДВБ 20 на основании данных о скорости транспортного средства, поступающих с соответствующего выхода АПП 18, сигналов таймера 11 и известного быстродействия исполнительного механизма вычисляется время At, на которое должно угЕрсждать ланное управляющее иоздеГютвие момент наезда задних колес на данную неровность местности. В соответствии с вычисленными временами Д t ДВВ 20 получает требуемое значение управляющего воздействия из БП 21, передает его на вход ЦАП 22, где оно преобразуется в ана- логовьп электрический сигнал, который поступает на БУ 23, который перемещает золотник 13 гидрораспределителя 14 требуемым образом, обеспечивая работу силовых гидроцилиндров 7, чтобы скомпенсировать угол .
Максимальный угол, на который может быть повернут остов 1 транспортного средства с помощью бортовых редукторов 3, обозначим , а максимально допустимый угол крена для данного транспортного средства А on
Может сложиться такая ситуация, что kp-M Hoe .
В этом случае ВБ 19 вьщает водителю транспортного средства предупреждающий сигнал или производит остановку транспортного средства до выработки
Составитель Ю.Наумов Редактор А.Маковская Техред М.Моргентал Корректор М.Самборская
Заказ 5501/20
Тираж 528
ВНИИПИ Государственного комитета по изобретениям и открытиям при ГКНТ СССР 113035, Москва, Ж-35, Раушская наб., д. 4/5
ноного мар1лрута Д1 ижеиия, если транспортное cpej;cTB() pnf oTaeT в аитомл- тическом режиме.
Формула изобретения
Устройство для предотвращения бокового крена транспортного средства,
содержащее датчик бокового крена, датчик скорости и профилометр, выходы которых подключен, к входам основного вычислительного блока, связанного выходом с входом исполнительного
механизма, о.тличающееся тем, что с целью повышения эффективности, оно снабжено таймером, блоком памяти и дополнительным вьнислитель- ным блоком, причем дополнительный вычислительный блок связан двунаправленной информационной магистралью с блоком памяти, его выходы подключены соответственно к выходам основного вьмислительного блока, датчика скорости и таймера, а выход связан с исполнительным механизмом.
Л
LSJJ
Подписное
| Устройство для предотвращения опрокидывания транспортного средства | 1985 |
|
SU1243963A2 |
