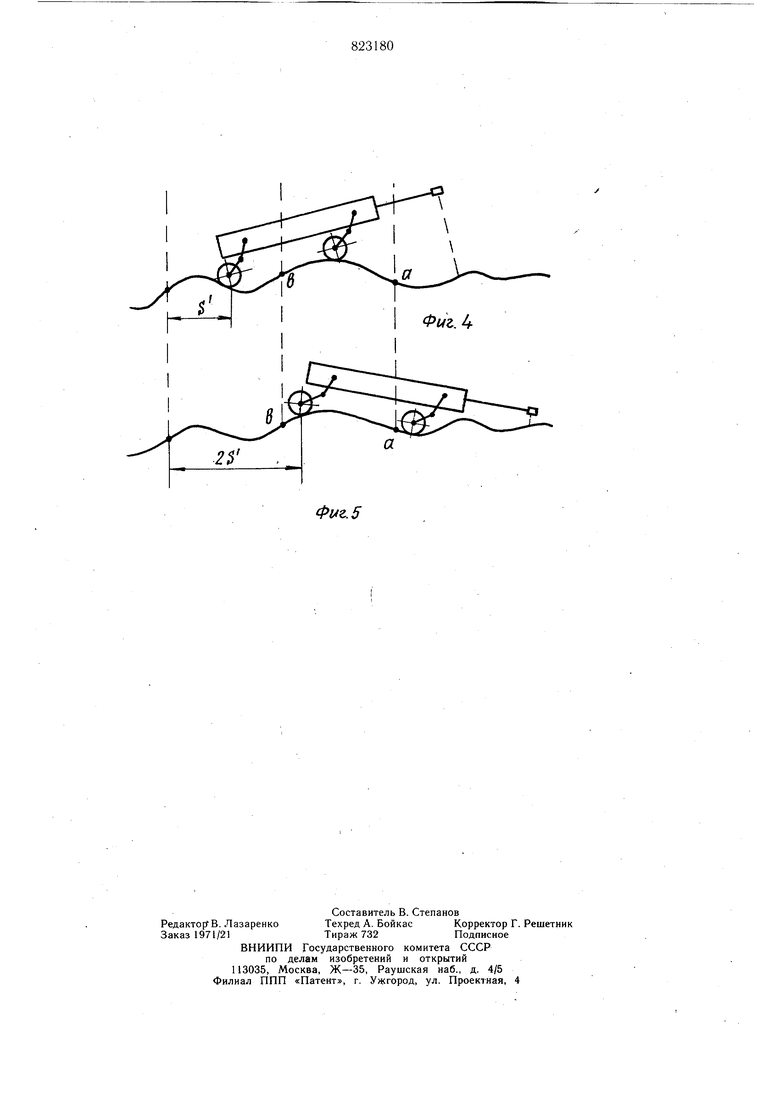
ного Средства после toro момента, когда &режиме колесного шагания оно сделало два шага каждый по L/2; на фиг. 4 - транспортное средство после того момента времени, когда в режиме колесного шагания оно сделало один шаг, равный S 3/4L; на фиг. 5 - положение транспортного средства пглле того момента времени, когда в режиме колесного шагания оно сделало два шага каждый по 3/4L
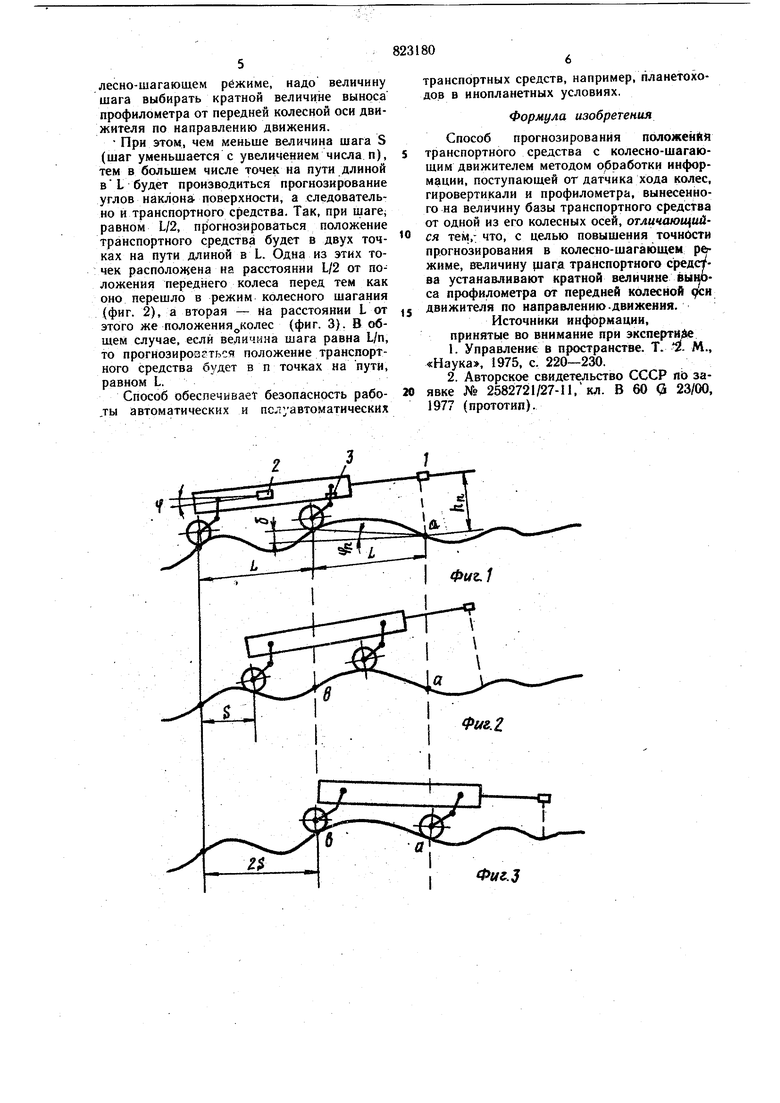
Рассмотрим сущность предлагаемого способа и для простоты изложения материала величину шага выберем, равной. L/2, где L - расстояние, на котором вынесен профилометр от оси переднего движителя трансиортНого средства в направлении движения (фиг, I-3). В дальнейшем изложении материала будем предполагать, что профилометр вынесет от оси переднего движителя на величину, равную колесной базе трайспортного средства.
На фиг. 1 показано транспортное средстйо, на котором для прогнозирования его положения установлены профилометр 1, гировертикаль 2 и датчики 3 вертикального хода колес. В качестве профилометра может быть применен, например, лазерный дальномер, в качестве гировертикали - двухстепенной гироскоп, измеряющий углы наклона транспортного средства в вертикально-продольной (дифферент) и в вертикально-поперечной (крен) плоскостях; а в качестве датчиков вертика.пь; иго хода колес - стандартные потенциомефические датчики.
На фиг. I видно, что прогнозируемый угол наклона поверхности в вертикальнопродольной плоскости может быть определен из соотношения
1..fl.v.;..-.a....i,0 -An-b)cosf L&itty
l.{H-hn-4n -
1-де Н - высота крепления профилокетра, которая измеряется в статическом положений транспортного средства на нулевом уклоне;
Дд- текущая величина вертикального перегушщения (хода) переднего колеса правого борта, измеряемая датчиком 3;
h, - текущее расстсянне, отсчитываемое от правого профилометра до про. филя местности, расположенного по направлению правой колеи, измеряемое датчиком профиломегра 1 Hf - текущий угол наклона Tpawcnoptного средства в вертикально-продольной плоскости (дифферент), измеряемый датчиком гировертикали 2;
L-колесная база;
S -- перепад высот неровностей рельефа.
По уравнениям подобным (1) могут быть определены прогнозируемый продольный угол
наклона поверхности над левым бортом и Прогнозируемый поперечиый угол наклона поверхности на расстоянии L от передних колес.
Если движение транспортного средства
происходит в колесном режиме, то наступит такой момент времени, когда ось переднего колеса расположится над точкой а, а ось заднего - над точкой в. Следовательно, . через некоторый промежуток времени транспортное средство окажется на углу наклона
поверхности, который был спрогнозирован по соотношеник) (1)
Если движение транспортного средства происходит в колесно-шагающем режиме, то для того, чтобы через некоторый промежуток времени ось переднего колеса расположилась над точкой а, а ось заднего - над точкой 0, необходимо выбрать длину шага кратной величине выноса профилометра, т.е.
S L/n, где S -- длина шага транспортного средства в колесно-шагающем режиме,
п 1,2,3,...,к - целые положительные
числа.
Из фиг. 2 и 3 видно, что при п 2, т.е. S L/2, ось передних колес через два шага расположится над точкой а, а ось задних -
над точкой 8. Поэтому при таком способе . выбора шага транспортное средство и в колесно-шагающем режиме окажется на углах наклона поверхности, которые прогнозируются по соотношению (1).
0 Если в колесно-шагающем режиме величина шага выбрана так, что
5Ф1/П,
to прогнозировать углы наклона поверхности, на которое попадёт транспортное сред ство, не представляется возможным. В качестве примера на фиг. 4 и 5 показано движение транспортного средства в колесно-шагающем режиме при 5 3/4 L. Откуда видно, что углы наклона, которые прогнозируются соотношением (1), .не соответствуют тем углам, на которые будут попадать транспортное средство в этом режиме движения. Действительно, после того, как транспортное средство переместилось на однн шаг, его колеса передних и задних осей еще не достигли соответственно точек айв (фиг. 4),
5 а после того, как транспортное средство переместилось на два шага, его колеса оказались за точками а и в. Однако,-перед тем как транспортное средство перешло -в колёсно-шагающий режим движения (фиг. I) с помощью установленных на нём датчиков 5 (профнлометр, гировертикаль, датчики вертикального хода колес) прогнозировалось угловое положение в предположении, что через некоторый момент времени колеса его
передних и задних осей окажутся соответственно 3 точках айв.
Таким образом, чтобы гювыснть точность прогнозирования углов наклона поверхности цри движении транспортного средства в колесно-шагаюшем режиме, надо величину шага выбирать кратной величине выноса профилометра от передней колесной оси движителя по направлению движения.
При этом, чем меньше величина шага S (шаг уменьшается с увеличением числа п), тем в большем числе точек на пути длиной вL будет производиться прогнозирование углов наклона поверхности, а следовательно и транспортного средства. Так, при шаге; равном L/2, прогнозироваться положение транспортного средства будет в двух точках на пути длиной в L. Одна из этих точек расположена на расстоянии L/2 от положения переднего колеса перед тем как оно перешло в режим колесного шагания (фиг. 2), а вторая - на расстоянии L от этого же положения колес (фиг. 3). В общем случае, если величина шага равна L/n, то прогнозироваться положение транспортного средства будет в п точках на пути, равном L.
Способ обеспечивает безопасность работы автоматических и полуавтоматических
транспортных средств, например, планетоходов в инопланетиых условиях.
Формула изобретения
Способ прогнозирования положений транспортного средства с колесио-шагаюшим движителем методом обработки информации, поступающей от датчика хода колес, гировертикали и профилометра, вынесенного на величину базы транспортного средства от одной из его колесных осей, отличающийся тем,- что, с целью повышения точности прогнозирования в колесно-шагающем режиме, величину luara транспортиого cpencfва устанавливают кратной величине выноса профилометра от передней колесной реи движителя по направлению-движения.
Источники информации, принятые во внимание при экспертизе
1.Управление в пространстве. Т. S. М., «Наука, 1975, с. 220-230.
2.Авторское свидетельство СССР пи заявке № 2582721/27-11,кл. В 60 Q 23/00,
1977 (прототип).

| название | год | авторы | номер документа |
|---|---|---|---|
| Способ прогнозирования положения транспортного средства | 1980 |
|
SU935324A1 |
| Способ передвижения транспортного средства с колесно-шагающим движителем | 1977 |
|
SU698830A1 |
| Колесно-шагающий движитель | 1975 |
|
SU552232A1 |
| Устройство прогнозирования положения транспортного средства при движении по пересеченной местности | 1980 |
|
SU893595A1 |
| Колесно-шагающий движитель транспортного средства | 1975 |
|
SU596496A1 |
| Колесно-шагающий движитель | 1979 |
|
SU880852A1 |
| Устройство для предотвращения опрокидывания транспортного средства | 1985 |
|
SU1243963A2 |
| Способ непрерывного передвижения транспортного средства с колесношагающим движителем в колесно-шагающем режиме | 1976 |
|
SU640897A1 |
| Колесно-шагающий движитель | 1980 |
|
SU948742A2 |
| Способ передвижения колесно- шАгАющЕгО ТРАНСпОРТНОгО СРЕдСТВАВ КОлЕСНОМ РЕжиМЕ | 1979 |
|
SU800008A1 |
Фиг.З
