I
Изобретение относится к области грузоподъемных устройств с магнитными захватами и может быть использовано при подъеме нетарированных грузов.
Известен магнитный захват, содержащий корпус с закрепленной на нем жесткой подвеской, подвижные и неподвижные блоки постоянных магнитов и механизм управления подвижными блоками 1 .
Недостатком вышеуказанного устройства является отсутствие элементов, обеспечивающих безопасность подъема нетарированных грузов.
Наиболее близким по технической сущности является магнитный захват, содержащий корпус с установленными в нем подвижными и неподвижными магнитными блоками, механизм замыкания и размыкания магнитного потока и, подвижную относительно корпуса,подвеску с пружиной 2, На подвеске неподвижно закреплена зубчатая рейка, входящая в зацепление с шестерней, снабженной оеью для крепления собачки храпового механизма и установленной свободно на храповом валике, на концах которого расположены кривошипы, связанные
тягами с зубчатым сектором, приводящим в движе1ше подвижный магнитный блок с помощью укрепленной на нем зубчатой рейки. Недостатками прототипа является отсутствие:
-элементов, обеспечивающих безопасность подъема нетарированных грузов;
-амортизирующих элементов, что приводит к быстрому износу керамических магнитов при постановке подъемника на груз.
Целью изобретения является расщнрение функциональных возможностей захвата грузов.
Эта цель достигается тем, что захват снабжен а.мортизатором, установленным в нижней части корпуса, и взаимодействующим с подвеской магнитным щунтом, установле1шым в верхней части корпуса лля перераспределения магнитного потока с выдержкой времени при .подъеме и транспортировке груза. При этом магнитный щунт имеет толщину, обеспешвающую четырехкратный запас надежности при транспортировке груза.
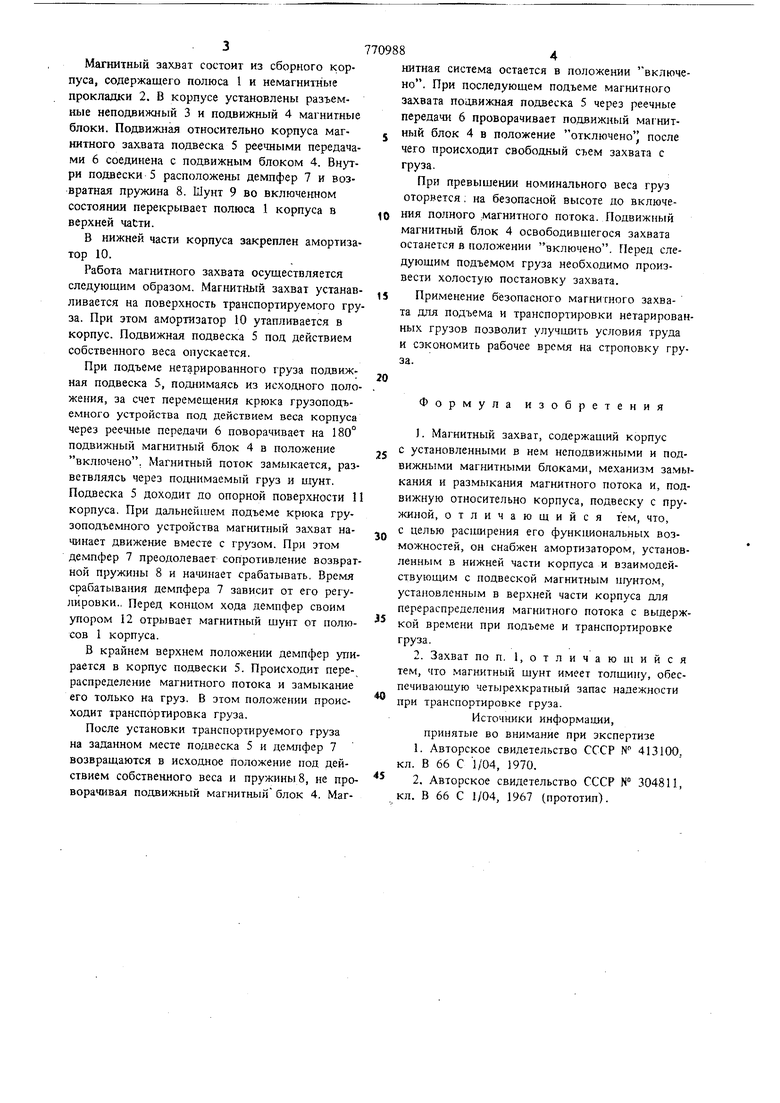
На фиг, 1 изображен магнитный захват, общий вид; на фиг. 2 - разрез А-А фиг. 1. Магнитный захват состоит из сборного корпуса, содержащего полюса 1 и немагнитные прокладки 2. В корпусе установлены разъемные неподвижный 3 и подвижный 4 магнитные блоки. Подвижная относительно корпуса магнитного захвата подвеска 5 реечными передачами 6 соединена с подвижным блоком 4. Внутри подвески 5 расположены демпфер 7 и возвратная пружина 8. Ыунт 9 во включенном состоянии перекрывает полюса 1 корпуса в верхней чаЬти. В нижней части корпуса закреплен амортизатор 10. Работа MariiHTHoro захвата осуществляется следующим образом. Магнитный захват устанавливается на поверхность транспортируемого гру за. При этом амортизатор 10 утапливается в корпус. Подвижная подвеска 5 под действием собственного веса опускается. При подъеме нетарированного груза подвижная подвеска 5, поднимаясь из исходного положения, за счет перемещения крюка грузоподъемного устройства под действием веса корпуса через реечные передачи 6 поворачивает на 180° подвижный магнитный блок 4 в положение включено. Магнитный поток замьпсается, разветвляясь через поднимаемый груз и шунт. Подвеска 5 доходит до опорной поверхности 1 корпуса. При дальнейшем подъеме крюка грузоподъемного устройства магнитный захват нашнает движение вместе с грузом. При этом демпфер 7 преодолевает сопротивление возврат ной пружины 8 и начинает срабатывать. Время срабатывания демпфера 7 зависит от его регулировки., Перед концом хода демпфер своим упором 12 отрывает магнитный шунт от полюсов 1 корпуса. В крайнем верхнем положении демпфер упи рается в корпус подвески 5. Происходит перераспределение магнитного потока и замыкание его только на груз. В этом положении происходит транспортировка груза. После установки транспортируемого груза на заданном месте подвеска 5 и демпфер 7 возвращаются в исходное положение под действием собственного веса и пружины 8, не про ворачивая подвижный магнитный блок 4. Маг74 китная система остается в положении включено. При последующем подъеме магнитного захвата подвижная подвеска 5 через реечные передачи 6 проворачивает подаижный магнитный блок 4 в положение отключено после чего происходит свободный съем захвата с груза. При превыщении номинального веса груз оторвется: на безопасной высоте до включения полного магнитного потока. Подвижный магнитный блок 4 освободивщегося захвата останется в положении включено. Перед следующим подъемом груза необходимо произвести холостую постановку захвата. Применение безопасного магнитного захвата для подъема и транспортировки нетарированных грузов позволит улучшить условия труда и сзкономить рабочее время на строповку груза. Формула изобретения 1.Магнитный захват, содержащий корпус с установленными в нем неподвижны.ми и подвижными магнитными блоками, механизм замыкания и размыкания магнитного потока и, подвижную относительно корпуса, подвеску с пружиной, отличающийся тем, что, с целью расншрения его функдиональных возможностей, он снабжен амортизатором, установленным в нижней части корпуса и взаимодействующим с подвеской магнитным шунтом, установленным в верхней части корпуса для перераспределения магнитного потока с выдержкой времени при подъеме и транспортировке груза. 2.Захват по п. 1, о т л и ч а ю щ и и с я тем, что магнитный щунт имеет толщину, обеспечивающую четырехкратный запас надежности при транспортировке груза. Источники информации, принятые во внимание при экспертизе 1.Авторское свидетельство СССР N 413100. кл. В 66 С 1/04, 1970. 2.Авторское свидетельство СССР № 304811, кл. В 66 С 1/04, 1967 (прототип).
П
10
| название | год | авторы | номер документа |
|---|---|---|---|
| Магнитный захват | 1980 |
|
SU903276A1 |
| Автоматический магнитный захват | 1979 |
|
SU770989A1 |
| Автоматический магнитный захват Быченко | 1980 |
|
SU933602A1 |
| Грузоподъемное магнитное устройство | 1982 |
|
SU1096186A1 |
| Грузозахватное устройство | 1983 |
|
SU1134522A1 |
| Магнитное грузозахватное устройство | 1989 |
|
SU1763341A1 |
| Устройство для закрепления ферромагнитных деталей | 1989 |
|
SU1713773A1 |
| Магнитное грузозахватное устройство | 1988 |
|
SU1601065A1 |
| Грузозахватное устройство | 1984 |
|
SU1294745A1 |
| МАГНИТНАЯ ТРАВЕРСА С ЭЛЕКТРОПОСТОЯННЫМИ МАГНИТНЫМИ ЗАХВАТАМИ | 2015 |
|
RU2582742C1 |

